技术特征:
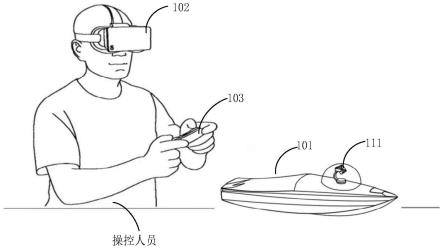
1.一种无人水尺观测系统,其特征在于,包括:无人船、vr眼镜和遥控装置;所述无人船上设置有图像采集装置,用于采集船舶航行中的图像数据;所述vr眼镜与所述图像采集装置通信连接,由操控人员佩戴,用于接收所述图像采集装置回传的图像数据;所述vr眼镜中集成有信号收发模块和头部动作追踪模块;所述头部动作追踪模块用于在检测到操控人员的头部移动动作的情况下生成动作命令;所述信号收发模块用于将所述动作命令发送至所述图像采集装置,使得所述图像采集装置依据所述动作命令执行转向动作;所述遥控装置与所述无人船通信连接,用于将操控人员下达的控制指令发送至所述无人船,使得所述无人船根据所述控制指令行驶。2.根据权利要求1所述的无人水尺观测系统,其特征在于,所述无人船还包括电源和动力装置;所述电源与所述动力装置连接,以向所述动力装置提供电能;所述遥控装置用于将操控人员下达的控制指令发送至所述动力装置,使得所述动力装置根据所述控制指令控制所述无人船行驶。3.根据权利要求1所述的无人水尺观测系统,其特征在于,所述无人船还包括定位装置,用于确定所述无人船所在的位置;所述遥控装置包括设置在无人船上的信号接收端和设置在操作人员端的遥控器,所述定位装置还用于将所述无人船的位置发送至所述遥控器进行显示。4.根据权利要求1所述的无人水尺观测系统,其特征在于,在5g网络全覆盖区域,所述图像采集装置通过5g网络信号将所述图像数据回传至所述vr眼镜,所述vr眼镜通过5g网络信号将所述动作命令发送至所述图像采集装置;和/或在5g网络全覆盖区域,所述遥控装置通过5g网络信号将所述控制指令传输至所述无人船。5.根据权利要求1所述的无人水尺观测系统,其特征在于,在5g网络未覆盖区域,所述图像采集装置通过2.4g无线信号将所述图像数据回传至所述vr眼镜,所述vr眼镜通过2.4g无线信号将所述动作命令发送至所述图像采集装置;和/或在5g网络未覆盖区域,所述遥控装置通过2.4g无线信号将所述控制指令传输至所述无人船。6.一种无人水尺观测方法,其特征在于,包括:在检测到操控人员的头部动作的情况下,记录头部动作数据;基于所述头部动作数据,生成动作命令;将所述动作命令发送至无人船上设置的图像采集装置,使得所述图像采集装置依据所述动作命令执行转向动作;接收并显示所述图像采集装置回传的船舶航行过程中的图像数据,以进行水尺观测。7.根据权利要求6所述的无人水尺观测方法,其特征在于,所述头部动作数据包括头部旋转角度和头部旋转方向;相应的,所述动作命令用于指示所述图像采集装置沿所述头部旋转方向旋转所述头部旋转角度。8.根据权利要求6所述的无人水尺观测方法,其特征在于,还包括:向所述无人船发送操控人员下达的控制指令,使得所述无人船根据所述控制指令行
驶。9.一种无人水尺观测装置,其特征在于,包括:记录模块,用于在检测到操控人员的头部动作的情况下,记录头部动作数据;生成模块,用于基于所述头部动作数据,生成动作命令;发送模块,用于将所述动作命令发送至无人船上设置的图像采集装置,使得所述图像采集装置依据所述动作命令执行转向动作;接收模块,用于接收并显示所述图像采集装置回传的船舶航行过程中的图像数据,以进行水尺观测。10.一种计算机可读存储介质,其上存储有计算机指令,其特征在于,所述指令被处理器执行时实现权利要求6至8中任一项所述方法的步骤。
技术总结
本说明书涉及水尺观测技术领域,具体地公开了一种无人水尺观测系统、方法及装置,其中,该系统包括:无人船、VR眼镜和遥控装置;无人船上设置有图像采集装置,用于采集船舶航行中的图像数据;VR眼镜与图像采集装置通信连接,由操控人员佩戴,用于接收图像采集装置回传的图像数据;VR眼镜中集成有信号收发模块和头部动作追踪模块;头部动作追踪模块用于在检测到操控人员的头部移动动作的情况下生成动作命令;信号收发模块用于将动作命令发送至图像采集装置,使得图像采集装置依据动作命令执行转向动作;遥控装置与无人船通信连接,用于将操控人员下达的控制指令发送至无人船,使得无人船根据控制指令行驶。上述方案可以实现无人水尺观测。观测。观测。
技术研发人员:张程程 卢浩 黄峰 曹建军
受保护的技术使用者:中国检验认证集团河北有限公司黄骅港分公司
技术研发日:2022.08.16
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。