技术特征:
1.一种基于位置智能的三维场景虚实交互方法,其特征在于,包括:按照预设时间间隔获取至少两个终端的位姿信息,并对每个所述终端的位姿信息进行处理;从至少两个终端中确定出目标终端,并根据处理后的所述目标终端的位姿信息判断所述目标终端的运行状态;当检测到所述目标终端的运行状态为静止状态时,确定所述目标终端的几何信息,并基于所述目标终端的几何信息建立第一缓冲区间;当在所述第一缓冲区间内未检测到其他终端时,根据处理后的所述目标终端的位姿信息以及所述目标终端的几何信息在预设三维场景中构建所述目标终端的虚拟模型;其中,所述目标终端的虚拟模型中的结构参数对应于所述目标终端的几何信息;显示包含所述目标终端的虚拟模型的预设三维场景,并将处理后的所述目标终端的位姿信息返回至所述目标终端;其中,所述对每个所述终端的位姿信息进行处理,包括:将所述预设时间间隔划分为至少两个间隔区间,并确定出每个所述终端与每个所述间隔区间对应的位姿信息;计算出每个所述终端中任意两个相邻的所述间隔区间所对应的位姿信息之间的欧式距离;当检测到任意两个相邻的所述间隔区间所对应的位姿信息之间的欧式距离超过预设距离区间时,对任意两个相邻的所述间隔区间所对应的位姿信息进行过滤处理;在经过过滤处理后的每个所述终端的位姿信息中,基于任意三个所述间隔区间所对应的位姿信息构建线性函数,并判断每个所述间隔区间对应的位姿信息是否符合所述线性函数;当检测到任意至少一个所述间隔区间对应的位姿信息不符合所述线性函数时,对所述任意至少一个所述间隔区间对应的位姿信息进行纠偏处理。2.根据权利要求1所述的方法,其特征在于,所述根据处理后的所述目标终端的位姿信息判断所述目标终端的运行状态,包括:对经过纠偏处理后的所述目标终端的位姿信息中每个间隔区间所对应的即时状态信息进行汇总处理;当检测到所有所述间隔区间所对应的即时状态信息一致时,获取所述目标终端的关联状态信息;当所述即时状态信息与所述目标终端的关联状态信息不一致时,根据所述即时状态信息确定所述目标终端的运行状态。3.根据权利要求1所述的方法,其特征在于,所述基于所述目标终端的几何信息建立第一缓冲区间,包括:基于所述目标终端的几何信息构建包裹所述目标终端的最小外接球模型,并确定出所述最小外接球模型的半径;对所述最小外接球模型的半径以及预设定位误差进行相加处理,得到第一缓冲区间。4.根据权利要求2所述的方法,其特征在于,在所述当检测到所述目标终端的运行状态为静止状态时,确定所述目标终端的几何信息,并基于所述目标终端的几何信息建立第一
缓冲区间之后,还包括:当在所述第一缓冲区间内检测到n个终端时,基于所述目标终端的关联状态信息对所述n个终端进行筛选处理;其中,n为正整数;根据处理后的所述目标终端的位姿信息以及所述目标终端的几何信息在预设三维场景中构建所述目标终端的虚拟模型,以及根据经过筛选处理后的所述n个终端的位姿信息以及所述n个终端的几何信息在所述预设三维场景中构建所述n个终端的虚拟模型。5.根据权利要求3所述的方法,其特征在于,在所述从至少两个终端中确定出目标终端,并根据处理后的所述目标终端的位姿信息判断所述目标终端的运行状态之后,还包括:当检测到所述目标终端的运行状态为运动状态时,获取所述目标终端的环境参数,并基于所述目标终端的环境参数、所述最小外接球模型的半径以及所述预设定位误差计算出第二缓冲区间以及第三缓冲区间;其中,所述第三缓冲区间的区间最大值等于所述第二缓冲区间的区间最大值的二倍;当在所述第二缓冲区间内未检测到其他终端,以及在所述第三缓冲区间内未检测到所述其他终端时,在处理后的所述目标终端的位姿信息中确定出与第一个间隔区间对应的位姿信息,并根据所述第一个间隔区间对应的位姿信息以及所述目标终端的几何信息在预设三维场景中构建所述目标终端的虚拟模型;基于处理后的所述目标终端的位姿信息中其他所有所述间隔区间对应的位姿信息,生成目标终端的动态轨迹线,并在所述预设三维场景中构建所述目标终端的动态轨迹线;当在所述预设第二缓冲区间检测到m个终端,以及在所述第三缓冲区间内未检测到其他终端时,在处理后的所述目标终端的位姿信息中确定出与第一个间隔区间对应的位姿信息以及与最后一个间隔区间对应的位姿信息,并根据所述第一个间隔区间对应的位姿信息、所述最后一个间隔区间对应的位姿信息以及所述目标终端的几何信息在预设三维场景中构建所述目标终端的虚拟模型;基于处理后的所述目标终端的位姿信息中其他所有所述间隔区间对应的位姿信息,生成目标终端的动态轨迹线,并在所述预设三维场景中构建所述目标终端的动态轨迹线;在处理后的所述m个终端的位姿信息中确定出与第一个间隔区间对应的位姿信息以及与最后一个间隔区间对应的位姿信息,并根据所述第一个间隔区间对应的位姿信息、所述最后一个间隔区间对应的位姿信息以及所述m个终端的几何信息在预设三维场景中构建所述m个终端的虚拟模型;基于处理后的所述m个终端的位姿信息中其他所有所述间隔区间对应的位姿信息,生成m个终端的动态轨迹线,并在所述预设三维场景中构建所述m个终端的动态轨迹线。6.根据权利要求5所述的方法,其特征在于,在所述当检测到所述目标终端的运行状态为运动状态时,获取所述目标终端的环境参数,并基于所述目标终端的环境参数、所述最小外接球模型的半径以及所述预设定位误差计算出第二缓冲区间以及第三缓冲区间之后,还包括:当在所述预设第二缓冲区间未检测到其他终端,以及在所述第三缓冲区间内检测到p个终端时,在处理后的所述目标终端的位姿信息中确定出与第r个间隔区间对应的位姿信息,并根据所述第r个间隔区间对应的位姿信息以及所述目标终端的几何信息在预设三维
场景中构建所述目标终端的虚拟模型;其中,r基于所述间隔区间的总个数确定;基于处理后的所述目标终端的位姿信息中其他所有所述间隔区间对应的位姿信息,生成目标终端的动态轨迹线,并在所述预设三维场景中构建所述目标终端的动态轨迹线;在处理后的所述p个终端的位姿信息中确定出与第r个间隔区间对应的位姿信息,并根据所述第r个间隔区间对应的位姿信息以及所述p个终端的几何信息在预设三维场景中构建所述p个终端的虚拟模型;基于处理后的所述p个终端的位姿信息中其他所有所述间隔区间对应的位姿信息,生成p个终端的动态轨迹线,并在所述预设三维场景中构建所述p个终端的动态轨迹线;当在所述预设第二缓冲区间检测到s个终端,以及在所述第三缓冲区间内检测到t个终端时,在处理后的所述目标终端的位姿信息中确定出与第一个间隔区间对应的位姿信息、与第r个间隔区间对应的位姿信息以及与最后一个间隔区间对应的位姿信息,并根据所述第一个间隔区间对应的位姿信息、所述第r个间隔区间对应的位姿信息、所述最后一个间隔区间对应的位姿信息以及所述目标终端的几何信息在预设三维场景中构建所述目标终端的虚拟模型;基于处理后的所述目标终端的位姿信息中其他所有所述间隔区间对应的位姿信息,生成目标终端的动态轨迹线,并在所述预设三维场景中构建所述目标终端的动态轨迹线;在处理后的所述s个终端的位姿信息中确定出与第一个间隔区间对应的位姿信息、与第r个间隔区间对应的位姿信息以及与最后一个间隔区间对应的位姿信息,并根据所述第一个间隔区间对应的位姿信息、所述第r个间隔区间对应的位姿信息、所述最后一个间隔区间对应的位姿信息以及所述s个终端的几何信息,在预设三维场景中构建所述s个终端的虚拟模型;基于处理后的所述s个终端的位姿信息中其他所有所述间隔区间对应的位姿信息,生成s个终端的动态轨迹线,并在所述预设三维场景中构建所述s个终端的动态轨迹线;在处理后的所述t个终端的位姿信息中确定出与第一个间隔区间对应的位姿信息、与第r个间隔区间对应的位姿信息以及与最后一个间隔区间对应的位姿信息,并根据所述第一个间隔区间对应的位姿信息、所述第r个间隔区间对应的位姿信息、所述最后一个间隔区间对应的位姿信息以及所述t个终端的几何信息,在预设三维场景中构建所述t个终端的虚拟模型;基于处理后的所述t个终端的位姿信息中其他所有所述间隔区间对应的位姿信息,生成t个终端的动态轨迹线,并在所述预设三维场景中构建所述t个终端的动态轨迹线。7.根据权利要求2所述的方法,其特征在于,在所述从至少两个终端中确定出目标终端,并根据处理后的所述目标终端的位姿信息判断所述目标终端的运行状态之后,还包括:当检测到所有所述间隔区间所对应的即时状态信息不一致时,确定所述目标终端的运行状态为混合运动状态;对所述目标终端的位姿信息进行二等分划分处理,并对每等分的位姿信息中每个间隔区间所对应的即时状态信息进行汇总处理;当检测到每等分的位姿信息中所有所述间隔区间所对应的即时状态信息一致时,根据所述即时状态信息确定每等分的所述目标终端的运行状态;当检测到每等分的位姿信息中所有所述间隔区间所对应的即时状态信息不一致时,对
所述每等分的位姿信息进行二等分划分处理。8.一种基于位置智能的三维场景虚实交互装置,其特征在于,包括:数据采集模块,用于按照预设时间间隔获取至少两个终端的位姿信息,并对每个所述终端的位姿信息进行处理;数据分析模块,用于从至少两个终端中确定出目标终端,并根据处理后的所述目标终端的位姿信息判断所述目标终端的运行状态;数据建立模块,用于当检测到所述目标终端的运行状态为静止状态时,确定所述目标终端的几何信息,并基于所述目标终端的几何信息建立第一缓冲区间;模型构建模块,用于当在所述第一缓冲区间内未检测到其他终端时,根据处理后的所述目标终端的位姿信息以及所述目标终端的几何信息在预设三维场景中构建所述目标终端的虚拟模型;其中,所述目标终端的虚拟模型中的结构参数对应于所述目标终端的几何信息;数据显示模块,用于显示包含所述目标终端的虚拟模型的预设三维场景,并将处理后的所述目标终端的位姿信息返回至所述目标终端。9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机可读存储介质中存储有指令,当所述指令在计算机或处理器上运行时,使得所述计算机或处理器执行如权利要求1-6任一项所述方法的步骤。
技术总结
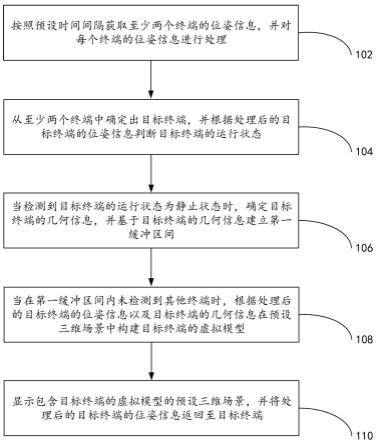
本申请公开了一种基于位置智能的三维场景虚实交互方法及装置,方法包括按照预设时间间隔获取至少两个终端的位姿信息,并对每个终端的位姿信息进行处理;根据处理后的目标终端的位姿信息判断运行状态;当检测到运行状态为静止状态时,确定几何信息,并基于几何信息建立第一缓冲区间;当在第一缓冲区间内未检测到其他终端时,根据位姿信息以及几何信息构建目标终端的虚拟模型。通过基于位置智能、三维可视化等技术,建立设备的位姿信息等相关信息的实时采集、处理与分析方法,并在三维场景中进行精准映射,以将虚拟三维场景中的计算结果反馈给设备进行即时响应与处理,达到虚实交互的目的,从而为管理者提供一个可视、可管、可靠的技术手段。技术手段。技术手段。
技术研发人员:廖明 叶冬梅 俞凯杰 孙世刚 魏鹏 毛可嘉 王凯迪 王宇帆 沈心玥 姚强 杨军 杨振凯 李振翔 周伟锋 金加棋 李昕 潘丽娟 王描
受保护的技术使用者:浙江中测新图地理信息技术有限公司
技术研发日:2022.10.31
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。