1.本发明涉及一种空间目标行为特征库构建方法,属于空间目标物理特征研究技术领域。
背景技术:
2.空间目标多种多样,其特征也千差万别,根据空间目标的不同特征,可将空间目标进行分类,确定空间目标类型,如遥感空间目标、侦查空间目标、通讯空间目标、作战空间目标等。不同的空间目标种类所对应的空间目标动作行为特征有明显的区别,通过构建空间目标行为特征库,空间目标在获取空间目标部分动作行为特征后,可根据空间目标物理特性进行匹配归类。传统的空间目标数据库一般包括物理数据库和逻辑数据库,且仅限于物理特征层面,并未有公开的空间目标行为特征库建立相关材料。因此需要建立一套可综合归纳不同类型空间目标物理特性的空间目标行为特征库构建与数据更新管理方法。
技术实现要素:
3.本发明解决的技术问题是:克服现有方法的不足,提供了一种空间目标行为特征库构建方法,整合并归纳同类型空间目标的共性特性,构建通用共性类型的特征集合,最终实现可以根据目标动作行为特征智能归类并完善数据库。
4.本发明目的通过以下技术方案予以实现:
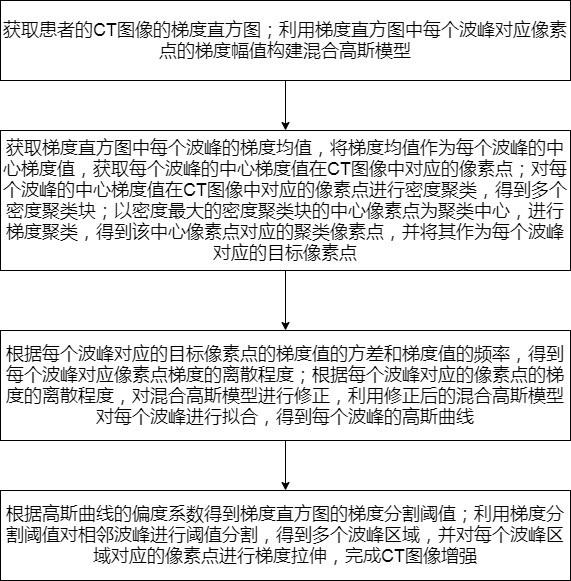
5.本发明公开了一种空间目标行为特征库构建方法,包括:
6.确定空间目标类型;
7.确定空间目标行为特征类型;
8.针对每种行为特征类型分别确定特征数据信息;
9.依据每类空间目标的每种特征数据信息的值,构建初始特征数据库;
10.对所述初始特征数据库中各类空间目标的行为特征进行建模,构建行为特征模型库;
11.获取待评估空间目标的特征数据信息的值,与行为特征模型库中各类型空间目标行为模型进行匹配,根据匹配结果确定待评估空间目标的目标类型;
12.将待评估空间目标的目标类型及其特征数据信息加入初始特征数据库中,对初始特征数据库进行更新形成空间目标行为特征库。
13.在上述空间目标行为特征库构建方法中,空间目标类型为遥感类、通信类、导航类、侦查类或攻防类。
14.在上述空间目标行为特征库构建方法中,所述行为特征类型为轨道异动、相对运动、旋转运动或载荷动作。
15.在上述空间目标行为特征库构建方法中,针对每种行为特征类型分别确定特征数据信息,具体方法为:
16.行为特征类型为轨道异动时,特征数据信息为包括异动标志和异动速度增量的时
间序列:oaq={{flagyd(t1),vex(t1),vey(t1),vez(t1)},{flagyd(t2),vex(t2),vey(t2),vez(t2)},
…
},其中,flagyd为异动标志,vex,vey,vez为三轴异动速度分量;
17.行为特征类型为相对运动时,特征数据信息为相对运动信息的时间序列:maq={{x(t1),y(t1),z(t1),dx(t1),dy(t1),dz(t1)},{x(t2),y(t2),z(t2),dx(t2),dy(t2),dz(t2)},
…
},其中,x,y,z分别为空间目标相对于监测空间目标本体的三轴空间坐标;
18.行为特征类型为旋转运动时,特征数据信息为姿态变化信息序列:raq={{q1(t1),q2(t1),q3(t1),q4(t4),dq1(t1),dq2(t1),dq3(t1),dq4(t1)},{q1(t2),q2(t2),q3(t2),q4(t2),dq1(t2),dq2(t2),dq3(t2),dq4(t2)},
…
},其中q1~q4为姿态四元数;
19.行为特征类型为载荷运动时,特征数据信息为载荷动作信息的时间序列:laq={{loadt(t1),loada(t2)},{loadt(t2),loada(t2)},
…
},其中,loadt为当前时刻所使用载荷类型,loada为当前时刻载荷所采用的动作类型。
20.在上述空间目标行为特征库构建方法中,依据每类空间目标的每种特征数据信息的值,构建初始特征数据库,具体方法为:
21.采用后验残差序列进行等方差检验的原理检测变轨情况,获取行为特征类型为轨道异动的特征数据信息oaq的值;
22.通过对目标的位置矢量测量结果,获取各类目标行为特征类型为相对运动的特征数据信息maq的值;
23.通过识别空间目标边缘和相对位姿信息和采用二阶线性微分,获取各类目标行为特征类型为轨道旋转运动的特征数据信息raq的值;
24.根据载荷类型与载荷状态,获取各类目标行为特征类型为目标载荷动作的特征数据信息laq的值;
25.按空间目标类型个数划分数据区,在每个数据区内,按照目标样本划分子数据区,每个目标样本子数据区内,依次放置轨道异动的特征数据信息oaq的值、相对运动的特征数据信息maq的值、轨道旋转运动的特征数据信息raq的值、目标载荷动作的特征数据信息laq的值,形成初始特征数据库。
26.在上述空间目标行为特征库构建方法中,所述获取各类目标行为特征类型为轨道异动的特征数据信息oaq的值,具体方法为:
27.采用常规最小二乘估计定轨方法获得的目标定轨结果,若与前一采样时刻的目标定轨结果相比,轨道根数的残差接近0,则无变轨,异动标志flagyd设置为无变轨标志,否则异动标志flagyd设置为有变轨标志;
28.依据变轨前后的轨道根数对比得到三轴异动速度分量vex,vey,vez。
29.在上述空间目标行为特征库构建方法中,所述获取各类目标行为特征类型为相对运动的特征数据信息maq的值,具体方法为:
30.采用二阶线性微分获取目标相对速度信息,公式为:
31.32.式中,ω(t)为所述空间目标在t时刻的位置,ts为采样时间,y(t)为目标相对速度信息;ω(t)通过对空间目标的位置矢量测量获得。
33.在上述空间目标行为特征库构建方法中,所述获取各类目标行为特征类型为轨道旋转运动的特征数据信息raq的值,具体方法为:
34.通过识别空间目标边缘,得到空间目标的带时间戳的当前姿态四元数q1(t),q2(t),q3(t),q4(t);
35.采用二阶线性微分获取目标姿态旋转速度信息,获取目标旋转运动信息dq1(t),dq2(t),dq3(t),dq4(t)。
36.在上述空间目标行为特征库构建方法中,对所述初始特征数据库中各类空间目标的行为特征进行建模,构建行为特征模型库,具体步骤为:
37.(1)利用隐式马尔科夫算法分别构建每种空间目标类型的行为特征模型,表达式为:
[0038][0039]
式中,λi为第i种空间目标类型,z为整个隐式马尔科模型中所有可能的隐性状态的集合,n为隐性状态的个数,m为整个隐式马尔科夫空间目标分类模型中所有可观测的系统状态集合,
‘
m1={oaq(1),maq(1),raq(1),laq(1)},m2={oaq(2),maq(2),raq(2),laq(2)},以此类推;k为显性状态的个数;π为特征向量序列的第一组数据{oaq(1),maq(1),raq(1),laq(1)}的状态概率分布,π中各元素的和为1;a为隐性状态概率转移矩阵,b为隐式马尔科夫空间目标分类模型的发射概率矩阵;
[0040]
利用所述特征数据库和baum-welch算法,对所述状态概率分布π、所述隐性状态概率转移矩阵a、所述发射概率矩阵b进行迭代计算,其中,采用高斯混合模型计算得到b,采用拉格朗日方法计算得到π和a,直到参数π、a、b均收敛,隐式马尔科夫模型的训练过程结束,得到每种空间目标类型对应的行为特征模型;
[0041]
将每种空间目标类型对应的行为特征模型放入数据库中,形成行为特征模型库。
[0042]
在上述空间目标行为特征库构建方法中,获取待评估空间目标的特征数据信息的值,与行为特征模型库中各类型空间目标行为模型进行匹配,根据匹配结果确定待评估空间目标的目标类型,具体方法为:
[0043]
确定待评估空间目标的空间目标类型,利用所述行为特征模型,获取待评估空间目标的特征数据信息的序列x,x={x(1),x(2),x(3),
…
},其中,x(i)={oaq(i),maq(i),raq(i),laq(i)},i=1,2,3,
…
;
[0044]
并利用马尔科夫模型前向算法,计算序列x在行为特征模型下的似然概率p(x|λi),获取似然概率值最大的概率pmax(x|λi),其对应的λi则为待评估空间目标对应的空间目标类型。
[0045]
本发明与现有技术相比具有如下有益效果:
[0046]
(1)本发明通过构建空间目标行为特征库,通过设置目标行为特征对应的特征数
据信息,实现了对空间目标行为特征的量化,增加了新的空间目标特征种类。
[0047]
(2)本发明提出了一种空间目标行为特征库构建方法,通过在特征库内构建特征模型库,实现了对目标输入行为特征的自动有效分类,解决了传统空间目标数据库不具备空间目标动作行为特性自动归类分析功能,为实现精确、涵盖范围广、特征全面的空间目标动作行为特征数据库奠定了基础。
附图说明
[0048]
图1是本发明实施例提供的空间目标行为特征库框架示意图;
[0049]
图2是本发明实施例提供的空间目标运动特性分类示意示意图。
具体实施方式
[0050]
下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
[0051]
如图1所示,本发明公开了一种空间目标行为特征库构建方法,步骤包括:
[0052]
步骤(1)、确定空间目标类型;空间目标类型包括遥感类、通信类、导航类、侦查类、攻防类。
[0053]
步骤(2)、确定空间目标行为特征类型;行为特征类型包括轨道异动、相对运动、旋转运动、载荷动作。
[0054]
步骤(3)、针对每种行为特征类型分别确定特征数据信息;具体方法为:
[0055]
行为特征类型为轨道异动时,特征数据信息为包括异动标志和异动速度增量的时间序列:oaq={{flagyd(t1),vex(t1),vey(t1),vez(t1)},{flagyd(t2),vex(t2),vey(t2),vez(t2)},
…
},其中,flagyd为异动标志,vex,vey,vez为三轴异动速度分量;
[0056]
行为特征类型为相对运动时,特征数据信息为相对运动信息的时间序列:maq={{x(t1),y(t1),z(t1),dx(t1),dy(t1),dz(t1)},{x(t2),y(t2),z(t2),dx(t2),dy(t2),dz(t2)},
…
},其中,x,y,z分别为空间目标相对于监测空间目标本体的三轴空间坐标;
[0057]
行为特征类型为旋转运动时,特征数据信息为姿态变化信息序列:raq={{q1(t1),q2(t1),q3(t1),q4(t4),dq1(t1),dq2(t1),dq3(t1),dq4(t1)},{q1(t2),q2(t2),q3(t2),q4(t2),dq1(t2),dq2(t2),dq3(t2),dq4(t2)},
…
},其中q1~q4为姿态四元数;
[0058]
行为特征类型为载荷运动时,特征数据信息为载荷动作信息的时间序列:laq={{loadt(t1),loada(t2)},{loadt(t2),loada(t2)},
…
},其中,loadt为当前时刻所使用载荷类型,loada为当前时刻载荷所采用的动作类型。
[0059]
步骤(4)、依据每类空间目标的每种特征数据信息的值,构建初始特征数据库,具体方法为:
[0060]
采用后验残差序列进行等方差检验的原理检测变轨情况,获取行为特征类型为轨道异动的特征数据信息oaq的值;采用常规最小二乘估计定轨方法获得的目标定轨结果,若与前一采样时刻的目标定轨结果相比,轨道根数的残差接近0,则无变轨,异动标志flagyd
设置为无变轨标志,否则异动标志flagyd设置为有变轨标志;依据变轨前后的轨道根数对比得到三轴异动速度分量vex,vey,vez。
[0061]
通过对目标的位置矢量测量结果,获取各类目标行为特征类型为相对运动的特征数据信息maq的值,具体方法为:
[0062]
采用二阶线性微分获取目标相对速度信息,公式为:
[0063][0064]
式中,ω(t)为空间目标在t时刻的位置,ts为采样时间,y(t)为目标相对速度信息;ω(t)通过对空间目标的位置矢量测量获得。
[0065]
通过识别空间目标边缘和相对位姿信息和采用二阶线性微分,获取各类目标行为特征类型为轨道旋转运动的特征数据信息raq的值,具体方法为:
[0066]
通过识别空间目标边缘,得到空间目标的带时间戳的当前姿态四元数q1(t),q2(t),q3(t),q4(t);
[0067]
采用二阶线性微分获取目标姿态旋转速度信息,获取目标旋转运动信息dq1(t),dq2(t),dq3(t),dq4(t)。
[0068]
根据载荷类型与载荷状态,获取各类目标行为特征类型为目标载荷动作的特征数据信息laq的值;
[0069]
按空间目标类型个数划分数据区,在每个数据区内,按照目标样本划分子数据区,每个目标样本子数据区内,依次放置轨道异动的特征数据信息oaq的值、相对运动的特征数据信息maq的值、轨道旋转运动的特征数据信息raq的值、目标载荷动作的特征数据信息laq的值,形成初始特征数据库。
[0070]
步骤(5)、对初始特征数据库中各类空间目标的行为特征进行建模,构建行为特征模型库在上述空间目标行为特征库构建方法中,对初始特征数据库中各类空间目标的行为特征进行建模,构建行为特征模型库,具体步骤为:
[0071]
(1)利用隐式马尔科夫算法分别构建每种空间目标类型的行为特征模型,表达式为:
[0072][0073]
式中,λi为第i种空间目标类型,z为整个隐式马尔科模型中所有可能的隐性状态的集合,n为隐性状态的个数,m为整个隐式马尔科夫空间目标分类模型中所有可观测的系统状态集合,
‘
m1={oaq(1),maq(1),raq(1),laq(1)},m2={oaq(2),maq(2),raq(2),laq(2)},以此类推;k为显性状态的个数;π为特征向量序列的第一组数据{oaq(1),maq(1),raq(1),laq(1)}的状态概率分布,π中各元素的和为1;a为隐性状态概率转移矩阵,b为隐式马
尔科夫空间目标分类模型的发射概率矩阵;
[0074]
利用特征数据库和baum-welch算法,对状态概率分布π、隐性状态概率转移矩阵a、发射概率矩阵b进行迭代计算,其中,采用高斯混合模型计算得到b,采用拉格朗日方法计算得到π和a,直到参数π、a、b均收敛,隐式马尔科夫模型的训练过程结束,得到每种空间目标类型对应的行为特征模型;
[0075]
将每种空间目标类型对应的行为特征模型放入数据库中,形成行为特征模型库。
[0076]
步骤(6)、获取待评估空间目标的特征数据信息的值,与行为特征模型库中各类型空间目标行为模型进行匹配,根据匹配结果确定待评估空间目标的目标类型,具体方法为:
[0077]
确定待评估空间目标的空间目标类型,利用行为特征模型,获取待评估空间目标的特征数据信息的序列x,x={x(1),x(2),x(3),
…
},其中,x(i)={oaq(i),maq(i),raq(i),laq(i)},i=1,2,3,
…
;
[0078]
并利用马尔科夫模型前向算法,计算序列x在行为特征模型下的似然概率p(x|λi),获取似然概率值最大的概率pmax(x|λi),其对应的λi则为待评估空间目标对应的空间目标类型。
[0079]
步骤(7)、将待评估空间目标的目标类型及其特征数据信息加入初始特征数据库中,对初始特征数据库进行更新形成空间目标行为特征库。至此可实现空间目标行为特征库的构建,最终构建出的数据库框架如图2。
[0080]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。