1.本技术涉及地下车库管理技术领域,尤其涉及一种基于网络平台的智能地下车库保洁系统。
背景技术:
2.地下车库通常分为多个停车区,每个停车区具有多个并排设置的停车位,停车位上停有车辆时,车辆的底部存在监控盲区,监控盲区内存在垃圾时,监控室内的管理人员无法观察到车位上的垃圾,就无法及时通知清洁人员对该车位进行清洁。并且清洁人员存在固定的上半时间,清洁人员下班后,车位上的垃圾也无法及时被清理。
技术实现要素:
3.本技术提供一种基于网络平台的智能地下车库保洁系统,用于解决现有技术中车位的监控盲区内的垃圾无法被及时清理的技术问题。
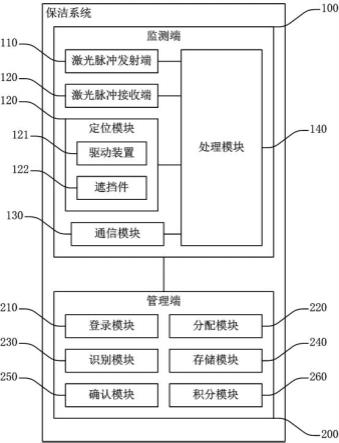
4.在本技术的实施例中,提供了一种基于网络平台的智能地下车库保洁系统,包括监测端和管理端;监测端安装在地下车库的停车区,用于监测停车区内的监控盲区环境获得监测数据,并将监测数据通过网络传输给管理端;管理端包括:识别模块,用于对监测数据进行识别以获得识别结果,识别结果包括需要清理和不需要清理;登录模块,用户使用账号和密码并通过网络平台登录管理端,用户登录管理端后能够查看监测数据和识别结果;分配模块,用户登录管理端后能够通过分配模块选择是否接受监测数据对应区域的清理任务,用户接受监测数据对应区域的清理任务后,监测数据对应区域的清理任务状态标注为清理中,没有用户接受监测数据对应区域的清理任务时,监测数据对应区域的清理任务状态标注为分配中;存储模块,用于存储用户的账号和密码、存储监测数据、存储识别结果、存储监测数据对应区域的清理任务状态。
5.在本技术实施例的一些实施方式中,所述监测端包括激光脉冲发射端、激光脉冲接收端、通信模块、处理模块,所述激光脉冲发射端和所述激光脉冲接收端分别安装在停车区的两侧并贴靠地面设置,所述激光脉冲发射端与所述激光脉冲接收端之间的连线横跨停车区的各停车位并穿过各停车位中的监控盲区;所述激光脉冲发射端以及所述激光脉冲接收端分别与处理模块连接,所述处理模块用于控制所述激光脉冲发射端发射激光脉冲,所述激光脉冲接收端接收到激光脉冲后以电信号的方式发送给所述处理模块,所述处理模块根据所述激光脉冲发射端和所述激光脉冲接收端对激光脉冲的收发状态判断停车区的监控盲区内是否存在垃圾;若所述激光脉冲发射端发射激光脉冲后,所述激光脉冲接收端接
收到激光脉冲则判定为监控盲区不存在垃圾;若所述激光脉冲发射端发射激光脉冲后,所述激光脉冲接收端接未收到激光脉冲则判定为监控盲区存在垃圾;所述通信模块与所述处理模块连接,所述管理端通过通信模块与所述管理端通信连接,所述处理模块将是否存在垃圾的判断结果通过所述通信模块发送给管理端。
6.在本技术实施例的一些实施方式中,所述监测端包括定位模块,定位模块用于获取监测端的定位数据,监测数据包括定位数据,识别模块对监测数据的识别结果包括定位数据,用户根据识别结果中的定位数据锁定待清洁区域的位置。
7.在本技术实施例的一些实施方式中,所述定位模块包括驱动装置和遮挡件,所述遮挡件安装在停车区的各停车位之间且贴靠地面设置,所述驱动装置与所述处理模块连接,所述处理模块控制所述驱动装置工作,所述驱动装置驱动所述遮挡件运动改变遮挡件的遮挡高度,当所述遮挡件的遮挡高度增大时遮挡所述激光脉冲发射端向所述激光脉冲接收端发射激光脉冲。
8.在本技术实施例的一些实施方式中,所述遮挡件的形状为长条板状,所述驱动装置为旋转电机,所述遮挡件沿停车位的侧边设置,所述遮挡件的宽度大于厚度,所述遮挡件旋转时能够切换至宽度方向水平或宽度方向竖直,所述遮挡件旋转切换至宽度方向水平时遮挡高度减小,所述遮挡件旋转切换至宽度方向竖直时遮挡高度增大。
9.在本技术实施例的一些实施方式中,所述遮挡件为橡胶长条板,所述遮挡件的内部嵌入固定有钢杆,所述钢杆沿停车位的侧边设置,所述钢杆的一端与所述旋转电机的输出轴固定连接。
10.在本技术实施例的一些实施方式中,每个停车区设有多个所述激光脉冲发射端和所述激光脉冲接收端,各所述激光脉冲发射端和所述激光脉冲接收端分别位于停车区的两侧并一一对应设置,监控盲区位于所述激光脉冲发射端和所述激光脉冲接收端之间。
11.在本技术实施例的一些实施方式中,所述管理端包括确认模块,用户完成所接受的清理任务后,通过确认模块进行确认是否已完成清理,确认完成后,监测端获取相应区域的监测数据作为核实数据并传输给管理端,识别模块识别核实数据获得核实结果,根据核实结果判断是否已完成清理。
12.在本技术实施例的一些实施方式中,所述管理端包括积分模块,当核实结果为已完成清理,则通过积分模块对接受清理任务并完成清理的用户账号增加积分,否则对接受清理任务但没有完成清理的用户账号减少积分。
13.在本技术实施例的一些实施方式中,所述用户为地下车库的停车的车主或保洁员工。
14.本技术具有如下有益效果:通过监测端监测监控的环境获得监测数据并将监测数据传输给网络平台上的管理端,用户通过登录管理端查看清理任务,用户选择接受清理任务并对监控盲区域进行清理,有助于解决现有技术中车位的监控盲区内的垃圾无法被及时清理的技术问题。
附图说明
15.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本申
请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
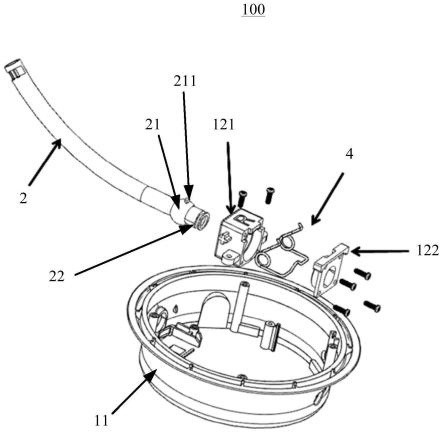
16.图1是本技术实施例中基于网络平台的智能地下车库保洁系统硬件部分安装的结构示意图;图2是本技术实施例中基于网络平台的智能地下车库保洁系统的结构示意图;图3是本技术实施例中分配模块的显示界面的结构示意图。
17.附图标记:100、监测端;111、激光脉冲发射端;112、激光脉冲接收端;120、定位模块;121、驱动装置;122、遮挡件;130、通信模块;140、处理模块;200、管理端;210、登录模块;220、分配模块;230、识别模块;240、存储模块;250、确认模块;260、积分模块;310、停车位;320、监控盲区;330、限位块;400、垃圾。
具体实施方式
18.下面结合附图和实施例对本技术的实施方式作进一步详细描述,本技术的实施方式部分使用的术语仅用于对本技术的具体实施例进行解释,而非旨在限定本技术。
19.如图1至图3所示,在本技术的实施例中,提供了一种基于网络平台的智能地下车库保洁系统,包括监测端100和管理端200;监测端100安装在地下车库的停车区,用于监测停车区内的监控盲区环境获得监测数据,并将监测数据通过网络传输给管理端200;管理端200包括:识别模块230,用于对监测数据进行识别以获得识别结果,识别结果包括需要清理和不需要清理;登录模块210,用户使用账号和密码并通过网络平台登录管理端200,用户登录管理端200后能够查看监测数据和识别结果;分配模块220,用户登录管理端200后能够通过分配模块220选择是否接受监测数据对应区域的清理任务,用户接受监测数据对应区域的清理任务后,监测数据对应区域的清理任务状态标注为清理中,没有用户接受监测数据对应区域的清理任务时,监测数据对应区域的清理任务状态标注为分配中;存储模块240,用于存储用户的账号和密码、存储监测数据、存储识别结果、存储监测数据对应区域的清理任务状态。
20.在本实施例的一些实施方式中,所述监测端100包括激光脉冲发射端111、激光脉冲接收端112、通信模块130、处理模块140,所述激光脉冲发射端111和所述激光脉冲接收端112分别安装在停车区的两侧并贴靠地面设置,所述激光脉冲发射端111与所述激光脉冲接收端112之间的连线横跨停车区的各停车位并穿过各停车位中的监控盲区;所述激光脉冲发射端111以及所述激光脉冲接收端112分别与处理模块140连接,所述处理模块140用于控制所述激光脉冲发射端111发射激光脉冲,所述激光脉冲接收端112接收到激光脉冲后以电信号的方式发送给所述处理模块140,所述处理模块140根据所述激光脉冲发射端111和所述激光脉冲接收端112对激光脉冲的收发状态判断停车区的监控盲区内是否存在垃圾;若所述激光脉冲发射端111发射激光脉冲后,所述激光脉冲接收端112接收到激光脉冲则判定为监控盲区不存在垃圾;若所述激光脉冲发射端111发射激光脉冲后,所述激光脉冲接收端112接未收到激光脉冲则判定为监控盲区存在垃圾;所述通信模块130与所述处理模块140
连接,所述管理端200通过通信模块130与所述管理端200通信连接,所述处理模块140将是否存在垃圾的判断结果通过所述通信模块130发送给管理端200。
21.在本实施例的一些实施方式中,所述监测端100包括定位模块120,定位模块120用于获取监测端100的定位数据,监测数据包括定位数据,识别模块230对监测数据的识别结果包括定位数据,用户根据识别结果中的定位数据锁定待清洁区域的位置。
22.在本实施例的一些实施方式中,所述定位模块120包括驱动装置121和遮挡件122,所述遮挡件122安装在停车区的各停车位之间且贴靠地面设置,所述驱动装置121与所述处理模块140连接,所述处理模块140控制所述驱动装置121工作,所述驱动装置121驱动所述遮挡件122运动改变遮挡件122的遮挡高度,当所述遮挡件122的遮挡高度增大时遮挡所述激光脉冲发射端111向所述激光脉冲接收端112发射激光脉冲。
23.在本实施例的一些实施方式中,所述遮挡件122的形状为长条板状,所述驱动装置121为旋转电机,所述遮挡件122沿停车位的侧边设置,所述遮挡件122的宽度大于厚度,所述遮挡件122旋转时能够切换至宽度方向水平或宽度方向竖直,所述遮挡件122旋转切换至宽度方向水平时遮挡高度减小,所述遮挡件122旋转切换至宽度方向竖直时遮挡高度增大。
24.在本实施例的一些实施方式中,所述遮挡件122为橡胶长条板,所述遮挡件122的内部嵌入固定有钢杆,所述钢杆沿停车位的侧边设置,所述钢杆的一端与所述旋转电机的输出轴固定连接。
25.在本实施例的一些实施方式中,每个停车区设有多个所述激光脉冲发射端111和所述激光脉冲接收端112,各所述激光脉冲发射端111和所述激光脉冲接收端112分别位于停车区的两侧并一一对应设置,监控盲区位于所述激光脉冲发射端111和所述激光脉冲接收端112之间。
26.在本实施例的一些实施方式中,所述管理端200包括确认模块250,用户完成所接受的清理任务后,通过确认模块250进行确认是否已完成清理,确认完成后,监测端100获取相应区域的监测数据作为核实数据并传输给管理端200,识别模块230识别核实数据获得核实结果,根据核实结果判断是否已完成清理。
27.在本实施例的一些实施方式中,所述管理端200包括积分模块260,当核实结果为已完成清理,则通过积分模块260对接受清理任务并完成清理的用户账号增加积分,否则对接受清理任务但没有完成清理的用户账号减少积分。
28.在本实施例的一些实施方式中,所述用户为地下车库的停车的车主或保洁员工。
29.如图1和图2所示,本实施例提供的基于网络平台的智能地下车库保洁系统,每个停车区具有唯一编号,例如图1中示出的是编号为a的停车区,编号为a的停车区中包含三个停车位,停车位的编号分别为a01、a02、a03,多个激光脉冲发射端111成排的设置在停车区的左边,多个激光脉冲接收端112成排的设置在停车区的右边,各激光脉冲发射端111和激光脉冲接收端112沿左右方向一一对应,各驱动装置121均具有编号,驱动装置121采用伺服电机,便于控制输出轴的旋转角度,伺服电机的控制器内预设有驱动编号,驱动编号的编号格式为:停车区编号 序号,例如图1中的两个驱动装置121的驱动编号中的序号从左至右依次为01和02。a01和a02的相邻边之间以及a02和a03的相邻边之间分别设有一个遮挡件122,驱动装置121设置在停车区的前边,停车位内的前部设有限位块,车辆由后至前驶入停车位后,车轮与限位块抵接实现车辆在停车位内的定位,车辆停好后,监控盲区处于车辆底部并
位于四个车轮围绕的矩形区域的内侧。为了便于表述和理解本方案,本实施例中以附图1中的图示为例,设置三组激光脉冲发射端111和激光脉冲接收端112,且从前到后依次编号为01、02和03;当a01和a02中存在垃圾且遮挡住激光脉冲发射端111和激光脉冲接收端112的光路时(编号为01、02的激光脉冲发射端111和激光脉冲接收端112之间的光路被遮挡),处理模块140检测到激光脉冲发射端111已发射激光脉冲且激光脉冲接收端112未接收到激光脉冲,判定停车区内存在垃圾,处理模块140从右到左依次控制两个驱动装置121工作,第一个驱动装置121工作时驱动遮挡件122高度增大遮挡激光脉冲发射端111与激光脉冲接收端112之间的光路,编号为03的激光脉冲发射端111和激光脉冲接收端112之间的光路由未遮挡切换为被遮挡,可以确定垃圾不在编号为a03的停车位中,因此垃圾要么在a01内要么在a02内要么分别在a01和a02内,处理模块140将判定结果作为定位数据传输至管理端200,此时的定位数据为:a01、a02、a01/a02。当只有a01的监控盲区内存在垃圾时,第一个遮挡件122高度增大时,编号为02、03的激光脉冲发射端111和激光脉冲接收端112之间的光路由未遮挡切换为被遮挡,处理模块140记录该切换状态,然后控制第一个遮挡件122遮挡高度减小,再控制第二个遮挡件122遮挡高度增大,编号为02、03的激光脉冲发射端111和激光脉冲接收端112之间的光路依然由未遮挡切换为被遮挡,处理模块140由此可以判定垃圾位于a01的监控盲区内,将该判定结果作为定位数据传输给管理端200,此时的定位数据为:a01。由此可知,能够实现对垃圾的识别和定位。由于停车区内可能存在车辆移动或行人走过造成激光脉冲发射端111和激光脉冲接收端112之间的光路被临时遮挡,因此处理模块140控制激光脉冲发射端111每隔1分钟发射一次激光脉冲,若连续20次均检测到光路被遮挡则判定为存在垃圾,若20次检测结果是车轮遮挡造成的,则说明停车位中的车辆未停好,可能会遮挡车道,需要通知车主挪车。
30.如图2和图3所示,通过通信模块130将监测数据传输给管理端200,管理端200接收到的监测数据存储在存储模块240中,识别模块230对监测数据进行识别并将识别结果存储在存储模块240中;管理端200设于云端,通过网络与监测端100连接,用户用电脑或智能手机打开管理端200所在的网络平台的网址,通过登录模块210输入账号和密码进行登录,然后通过分配模块220查看清理任务的状态信息和清理任务对应的监测数据和识别结果,通过分配模块220选择是否接受任务状态处于分配中的清理任务,用户接受清理任务后,清理任务的状态由分配中切换为清理中,用户通过监测数据中的定位数据锁定清理区域(例如区域1对应图1中的a01,区域2为其他停车区的停车位例如b02,区域3对应图1中的a02)在地下车库内的具体位置,然后赶往该区域进行清理工作,清理完成后通过确认模块250对清理任务的进度进行确认,确认完成清理后,管理端200向监测端100反馈核实指令,处理模块140根据核实指令控制激光脉冲发射端111、和驱动装置121再次工作获取监测数据,并通过通信模块130传输给管理端200,识别模块230再次识别监测数据,以核实清理区域是否已经完成清理,若核实已完成清理,则对用户的账号增加积分,否则减少用户账号的积分,物业公司可以根据用户的账号的积分对用户进行奖励,例如用户经过多次接受清理任务并完成清理任务,账号的积分较高,则在物业公司员工群通报嘉奖该用户或在业主群通报嘉奖该用户,或给与该用户物质奖励(例如停车费消费券等)。用户为小区的物业公司员工或业主或车库停车的车主,对物业公司的员工或者业主或者车库停车的车主分配账号,避免其他人员进入小区车库进行清理工作造成小区治安影响。解决了现有技术中车位的监控盲区内
的垃圾无法被及时清理的技术问题。
31.各停车位中的垃圾可能沿左右方向对齐,导致一次检测只能判定垃圾位于a03内,可以在确认模块250进行核验时再次检测,在处理任务的人员未离场时通知该人员及时清理掉位于同一光路上的其他垃圾。
32.以上实施例仅是对本技术的解释,其并不是对本技术的限制,本领域技术人员在阅读完本说明书后可以根据需要对本技术的实施方式做出没有创造性贡献的修改,但只要在本技术的权利要求范围内都受到专利法的保护。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。