1.本发明具体涉及一种船舶非稳态航行下液货消耗量的评估方法。
背景技术:
2.船舶出航前会对本次航行所需的燃油、滑油、淡水等液货进行预估,根据估算的结果决定携带液货的大概吨位。目前该估算过程主要依赖人工记录的液货吨位测量值数据,而受船舶非稳态航行导致的纵横摇影响,液货吨位测量传感器测量值与真实值之间存在较大的误差,根据人工记录的液货吨位数据直接估算,未去除船舶在非稳态航行中对液货自由液面造成的晃荡影响,存在较大的计算误差;且需要人工估算液货的添加、消耗时间段,准确性低、时效性差。
技术实现要素:
3.为解决上述技术问题,本发明提供一种船舶非稳态航行下液货消耗量的评估方法,根据每个消耗时间段内液货吨位变化起始时刻和结束时刻的差值统计出所评估时间段内总的消耗量,去除航行中船舶晃动的干扰,获得船舶非稳态航行下液货的吨位测量数据。
4.本发明的目的是通过以下方案实现的:一种船舶非稳态航行下液货消耗量的评估方法包括以下步骤:
5.步骤1:获取从船舶状态监测设备采集到的航段原始数据,筛选得到包含时间信息的船舶液货舱吨位测量数据l,将数据载入数据分析软件;
6.步骤2:使用数据分析软件绘制液货吨位测量数据l的随时间变化的曲线,并做滑动平均处理,设置滑动平均长度n为数据总长度的1/1000,对液货吨位测量数据l依次进行滑动平均值计算,计算公式如式(1)所示:
7.ft=(at-1 at-2 at-3
…
at-n)/n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
8.其中,ft代表下一时刻的预测值,n代表滑动的时刻个数,at-1代表前1时刻的实际值,at-2代表前2时刻的实际值,at-3代表前3时刻的实际值,at-n代表前n时刻的实际值。
9.获取平滑后的液货吨位数据smoothl,并绘制平滑后的液货吨位数据曲线。
10.步骤3:识别液货添加、消耗时间段
11.步骤3.1:对平滑后的液货吨位数据进行求导,即错位相减求相邻吨位数据,得到平滑后的液货吨位数据的一阶导数曲线,获取相邻时间点的吨位变化量,视为液货吨位差商la1。
12.步骤3.2:判断液货吨位差商la1与0对比,生成状态逻辑序列f,液货吨位差商la1大于0时为液货添加状态,逻辑序列值为1,液货吨位差商la1小于等于0时为液货消耗状态,逻辑序列值为0。根据对比结果筛选出液货吨位曲线中上升时间段的数据。
13.步骤4:设置连续稳定时间长度阈值t,选取阈值中一点,对液货吨位差商la1作连续稳定性判断。
14.进行连续稳定性判断时,如果状态逻辑序列f中为1的数据连续稳定时间长度大于
阈值t,保留平稳段,状态逻辑序列f中对应值不变,如果状态逻辑序列f中为1的数据连续平稳时间长度小于阈值t,则认为该部分数据不稳定,状态逻辑序列f中对应逻辑值从1改为0,获得液货吨位的状态逻辑序列f1。
15.再选取阈值中另一点,重复上述判断过程,得到第二个状态逻辑序列f2,对比状态逻辑序列f1和状态逻辑序列f2的稳定性,选取其中稳定性高的序列作为液货吨位的连续稳定的状态逻辑序列f’,对连续稳定的状态逻辑序列f’中值为0的连续序列段依次进行编号,分别为i、ii、iii
…
。
16.步骤5:获取连续稳定的状态逻辑序列f’中编号为i、ii、iii
…
所对应的起始时刻和结束时刻,对应步骤2中得到的平滑后的液货吨位数据smoothl,分别得到起始时刻和结束时刻的液货吨位评估值smoothl
start
和smoothl
end
。
17.步骤6:对每个编号序列均计算起始时刻和结束时刻的液货吨位评估值的差值,即smoothl
start-smoothl
end
,得到本航段该舱室的液货消耗统计结果,最后将各消耗段的消耗量相加得到船舶在本航段的全部液货消耗量。
18.优选的,在步骤4中,进行连续稳定性判断时,通过选取阈值中的多个点进行比较,选取其中稳定性最好的点对应的状态逻辑序列作为连续稳定的状态逻辑序列f’,以进一步提高评估方法的准确性。
19.优选的,本发明提供的液货消耗量的评估方法使用的数据分析软件包括matlab和python。
20.与现有技术相比,本发明具备以下优点:
21.本发明提供的一种船舶非稳态航行下液货消耗量的评估方法,首先,对船舶液货的吨位测量数据进行滑动平均处理,剔除由于船舶非稳态航行导致的数据突变和大幅波动情况;然后,对滑动平均后的吨位数据进行求导,在此基础上,根据一阶导数值是否大于0时识别液货添加和消耗状态;再后,根据数据分析的需求设定连续稳定液货添加时间的区间长度,通过识别一阶导数变化明显的数据确定液货添加的全部起始和结束时刻;最后,通过求每个液货消耗时间段的吨位测量值差值,实现本航段该舱室的消耗量自动统计。
22.本发明通过采用滑动平均、求导等方法,剔除了由于船舶非稳态航行导致的数据突变和大幅波动,自动识别液货添加状态和消耗状态,对应统计各序列的消耗量,最终得到本航次该液货的消耗量统计情况,节省了船员反复登记、计算的时间,提高了液货消耗量统计的准确率,为船舶出航前的液货准备提供了实际数据支撑。
附图说明
23.图1本发明一种船舶非稳态航行下液货消耗量的评估方法流程图;
24.图2为本发明实施例中饮用淡水测量曲线;
25.图3为本发明实施例中和饮用淡水测量数据的平滑曲线;
26.图4为本发明实施例中饮用淡水吨位数据的一阶导数曲线;
27.图5为本发明实施例中饮用淡水吨位数据的状态逻辑序列f的示意图;
28.图6为本发明实施例中饮用淡水吨位数据在t=300s时的状态逻辑序列f1的示意图;
29.图7为本发明实施例中饮用淡水吨位数据在t=500s时的状态逻辑序列f2的示意
图;
30.图8为本发明实施例中饮用淡水消耗量分布结果。
具体实施方式
31.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
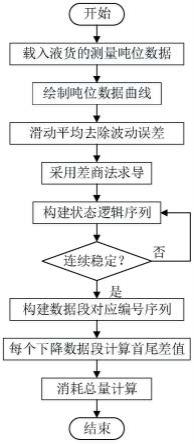
32.如图1所示,本发明技术方案中提供的一种船舶非稳态航行下液货消耗量的评估方法,包括以下步骤:
33.步骤1:获取从船舶状态监测设备采集到的航段原始数据,筛选得到包含时间信息的船舶液货舱吨位测量数据l,将数据载入数据分析软件。
34.步骤2:使用数据分析软件绘制液货吨位测量数据l的随时间变化的曲线,并做滑动平均处理,设置滑动平均长度n为数据总长度的1/1000,对液货吨位测量数据l依次进行滑动平均值计算,计算公式如式(1)所示:
35.ft=(at-1 at-2 at-3
…
at-n)/n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
36.其中,ft代表下一时刻的预测值,n代表滑动的时刻个数,at-1代表前1时刻的实际值,at-2代表前2时刻的实际值,at-3代表前3时刻的实际值,at-n代表前n时刻的实际值。
37.获取平滑后的液货吨位数据smoothl,并绘制平滑后的液货吨位数据曲线。
38.步骤3:识别液货添加、消耗时间段
39.步骤3.1:对平滑后的液货吨位数据进行求导,即错位相减求相邻吨位数据,得到平滑后的液货吨位数据的一阶导数曲线,获取相邻时间点的吨位变化量,视为液货吨位差商la1。
40.步骤3.2:将步骤3.1得到的液货吨位差商la1与0对比,生成状态逻辑序列f,液货吨位差商la1大于0时为液货添加状态,逻辑序列值为1,液货吨位差商la1小于等于0时为液货消耗状态,逻辑序列值为0。根据对比结果筛选出液货吨位曲线中上升时间段的数据。
41.步骤4:连续稳定液货添加时间段识别:设置连续稳定时间长度阈值t,选取阈值中一点,对液货吨位差商la1作连续稳定性判断。
42.进行连续稳定性判断时,如果状态逻辑序列f中为1的数据连续稳定时间长度大于阈值t,保留平稳段,状态逻辑序列f中对应值不变,如果状态逻辑序列f中为1的数据连续平稳时间长度小于阈值t,则认为该部分数据不稳定,状态逻辑序列f中对应逻辑值从1改为0,获得液货吨位的状态逻辑序列f1。
43.再选取阈值中另一点,重复上述判断过程,得到第二个状态逻辑序列f2,对比状态逻辑序列f1和状态逻辑序列f2的稳定性,选取其中稳定性高的序列作为液货吨位的连续稳定的状态逻辑序列f’,对连续稳定的状态逻辑序列f’中值为0的连续序列段依次进行编号,分别为i、ii、iii
…
。
44.步骤5:获取连续稳定的状态逻辑序列f’编号为i、ii、iii
…
所对应的起始时刻和结束时刻,根据步骤2中得到的平滑后的液货吨位数据smoothl,分别得到起始时刻和结束时刻的液货吨位评估值smoothl
start
和smoothl
end
。
45.步骤6:对每个编号序列均计算起始时刻和结束时刻的液货吨位评估值的差值,即
smoothl
start-smoothl
end
,得到本航段该舱室的液货消耗统计结果,最后将各消耗段的消耗量相加得到船舶在本航段的全部液货消耗量。
46.在本发明的一些实施例中,在步骤4中,进行连续稳定性判断时,通过选取阈值中的多个点进行比较,选取其中稳定性最好的点对应的状态逻辑序列作为连续稳定的状态逻辑序列f’,以进一步提高评估方法的准确性。
47.在本发明的一些实施例中,使用船舶液货消耗量评估方法对某型船饮用淡水舱淡水消耗量进行评估的具体步骤如下:
48.步骤1:获取从船舶状态监测设备采集到的航段原始数据,筛选得到包含时间信息的船舶饮用淡水舱吨位数据l,将数据载入matlab。
49.步骤2:如图2所示,使用matlab绘制饮用淡水舱吨位数据l随时间的变化曲线,并作滑动平均处理,设置滑动平均长度n=195,对淡水舱吨位数据l求滑动平均,计算公式如式(1)所示:
50.ft=(at-1 at-2 at-3
…
at-n)/n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
51.其中,ft代表下一时刻的预测值,n代表滑动的时刻个数,at-1代表前1时刻的实际值,at-2代表前2时刻的实际值,at-3代表前3时刻的实际值,at-n代表前n时刻的实际值。
52.获得平滑的饮用淡水舱吨位数据smoothl,并绘制平滑后的饮用淡水舱吨位数据曲线,如图3所示。
53.步骤3:识别饮用淡水添加、消耗时间段
54.步骤3.1:对平滑后的液货吨位数据进行求导,即错位相减求相邻吨位数据,得到饮用水吨位数据的一阶导数曲线,如图4所示,获取相邻时间点的吨位变化量,视为液货吨位差商la1。
55.步骤3.2:将步骤3.1得到的饮用水吨位差商la1与0对比,生成状态逻辑序列f,如图5所示,其中,液货吨位差商la1大于0时为饮用水添加状态,逻辑序列值为1,液货吨位差商la1小于等于0时为饮用水消耗状态,逻辑序列值为0。根据对比结果筛选出液货吨位曲线中上升时间段的数据。
56.步骤4:设置连续稳定时间长度阈值t(300s、600s),对饮用淡水差商la1作连续稳定性判断,如果状态逻辑序列f中为1的数据连续稳定时间长度大于阈值t,保留平稳段,状态逻辑序列f中对应值不变,如果状态逻辑序列f中为1的数据连续平稳时间长度小于阈值t,则认为该部分数据不稳定,f中对应逻辑值从1改为0。由此获得t=300s和t=500s时最终饮用淡水吨位的状态逻辑序列f1和f2如图6至图7所示,由于t=500s时,状态逻辑序列f2各序列的延续时间更长,稳定性更好,因此选择t=500s时的状态逻辑序列f1作为连续稳定的状态逻辑序列f',舍弃t=300s时的状态逻辑序列f2,对连续稳定的状态逻辑序列f'中值为0的连续序列段依次进行编号,分别为i、ii、iii、iv、v、vi、vii。
57.步骤5:如图7所示,连续稳定的状态逻辑序列f'编号为i、ii、iii、iv、v、vi、vii所对应的起始时刻和结束时刻,共有7个编号序列,对应的起始时刻和结束时刻分别是(10:39699),(41698:47290),(49289:90723),(92721:139136),(141014:149668),(151679:159030),(161030:192798),对应图2中的平滑后的饮用淡水舱吨位数据smoothl,分别得到起始时刻和结束时刻的饮用淡水吨位评估值smoothl
start
和smoothl
end
,7个编号序列的起始时刻和结束时刻对应到图2中的饮用淡水吨位评估值分别为(19.63:16.22),(19.31:
18.95),(22.11:17.82),(22.12:14.48),(19.28:18.92),(19.98:18.62),(21.99:19.30)。
58.步骤6:如图8所示,对每个编号序列均计算起始时刻和结束时刻饮用淡水吨位评估值的差值,即smoothl
start-smoothl
end
,分别为3.41吨,0.36吨,4.29吨,7.64吨,0.36吨,1.36吨,2.69吨,则船舶在本航段的全部饮用淡水消耗量为各消耗段之和,为20.11吨。
59.以上是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。