一种boost变换器的相平面割线轨迹控制方法
技术领域
1.本发明属于电力电子技术领域,具体涉及一种boost变换器的相平面割线轨迹控制方法。
背景技术:
2.近些年来,由于科技的发展,针对电力变换的研究达到了空前的繁荣。其中dc-dc变换器由于其高效率,高功率密度,低emi等特点在工业生产得到了极大的应用,例如:移动设备中的燃料电池,光伏(pv)系统,混合动力汽车(hev)中的锂离子电池,以及智能电器等领域。其中特别是燃料电池混合动力汽车系统需要boost型的dcdc变换器,因为它们的大燃料电池的输出电压应该被调节,以便为后级级联设备提供稳定的直流电压。而控制这类升压型的dcdc变换器远比降压型困难,一方面是因为升压型变换器的输出电压高于输入电源电压;另一方面,boost变换器的状态变量相互关联(包括它们的输入干扰和参数不确定性)导致建模和线性化困难;此外,升压型boost变换器也表现出非最小相位特性,这种非最小相位在系统中表现出相位滞后现象,如果boost变换器的负载电阻和电压增益等参数的变化会进一步加剧系统的不稳定和无法实现宽范围的闭环带宽。所以说,控制升压型的dcdc变换器比降压型困难。
3.为了获得boost变换器稳定的输出电压,目前已经提出了许多控制算法来调节。
4.针对boost变换器是一类非线性时变系统,通过围绕状态空间平均模型的精确工作点线性化得到小信号模型,在此基础上引入经典控制理论来进行控制器的设计。线性控制器的设计简单方便,并且易于实现,但是无法处理系统参数变化以及大信号的瞬变;
5.而多回路电流模式控制则是将输入电感电流用于具有高交叉频率的内部电流环路调节,输出电压则是由较慢的外部电压环路调节。这种控制器的设计考虑了不同的环路增益和特定目标操作点来评估系统性能,极大地改善了系统的动态响应,但是设计双回路控制器具有较大的挑战性,特别是对于高阶变换器的拓扑。
6.以上不论是基于小信号模型,还是多回路方式进行控制器的设计都是基于线性系统理论,只能在某一特定工作点处具有出色的性能,一旦系统偏离平衡点,所设计的控制器干扰抑制能力下降。所以线性控制理论不能有效应对boost变换器输入电源电压以及系统参数的变化。为了能够应对dcdc变换器固有的非线性,宽输入电压和负载变化,并且确保在任何工作条件下的稳定性以及同时提供快速瞬态响应,很多文献引入了先进控制理论来克服线性系统进行控制器设计带来的不足。
7.dcdc变换器中开关管的存在构成了系统的变结构特性,因此滑模控制(smc)技术适用于boost变换器。smc在输入电压和输出负载出现扰动时表现出稳定的输出电压调节,相比于传统的pi控制,它具有更快的动态响应以及更小的过冲和下冲。然而,由于滑模面交叉,smc的调节输出电压具有高频纹波。此外,它在开关面引起的高频抖震难以消除,容易激发系统的未建模动态。
8.而无传感器控制则可以提供系统可靠性并且降低系统的成本。在dcdc升压变换器
中提出了许多估计技术,例如:通过静态近似和扩展卡尔曼滤波来估计电感电流的无传感器显示模型预测控制;或者在每个开关周期中都有一个离散低通滤波器,在时域中对电感电流进行估计。然而,估计误差仍然影响变换器输出电压的调节精度。
技术实现要素:
9.为了综合考虑电压偏差和恢复时间,本文提出了一种基于升压变换器输出电压下冲和响应时间之间的割线轨迹控制。与传统的基于自然轨迹作为开关面的边界控制不同的是,我们在轻载到重载跃变的动态过程中选取了多个暂态工作点,下一个暂态工作点的开通轨迹是上一个暂态工作点关断轨迹的割线,通过相平面割线轨迹控制(trajectory control of secant in phase plane)来实现电压偏差和恢复时间的均衡。而由于不确定性和干扰在在现代工业体系中无处不在,使得传统的闭环控制不能得到令人满意的效果,因此,为了实时补偿不确定性和扰动,我们在稳态过程引入了自抗扰控制(adrc)来提高系统对内部参数扰动和外部扰动的鲁棒性。
10.为实现上述目的,本发明的技术方案如下:
11.一种boost变换器的相平面割线轨迹控制,包括以下步骤:
12.步骤1.判断boost变换器的电路处于稳态还是瞬态,如果是瞬态,进入步骤2;否则进入步骤3;
13.步骤2.当负载从轻载到重载跃变时,在动态过程中选择暂态工作点来综合考虑输出电压下冲和恢复时间这两个指标,基于mosfet开关管开通和关断的自然轨迹到达目标工作点,因此,理论上只要两个开关动作就可使系统达到稳态。
14.步骤3.当电路为稳态时,使用改进的自抗扰控制控制器进行控制,其中,自抗扰控制控制器具体为,
15.上式中,k1和k2为控制器增益,y
ref
为期望的输出电压,分别为扩张观测器观测到的输出电压和输出电压倒数,b0为控制输入的系数,为估计的扰动。
16.进一步地,所述boost变换器的拓扑结构包括:电感(l)、电容(c)、开关管(s1)和二极管(d1);其中,开关管(s1)的漏极与电感的一端连接,开关管(s1)的源极与输入电源负极相连;二极管(d1)的阳极与电感的一端和开关管(s1)的漏极相连,二极管(d1)的阴极与输出电容(c)的一端连接,输出电容(c)的另一端与电源负极相连。
17.进一步地,所述boost变换器的输出电压不能为负,因为电路拓扑结构中二极管的存在。
18.进一步地,所述boost变换器在稳态期间的工作模式为连续导通模式(ccm)。
19.进一步地,本发明控制方法适用于负载扰动较小情况,即扰动使得变换器的输出电压不为0。
20.进一步地,控制器增益k1=w
c2
,k2=2wc,wc为带宽参数化的控制器增益。
21.综上所述,由于采用了上述技术方案,本发明的有益效果是:
22.1.本发明所提出基于自然轨迹进行的暂态控制方法在负载扰动时,切换到拟提议的控制方法,使用状态平面分析来估计开关管开通和关断时间,让状态变量在兼顾降低组件应力的基础上在最短时间内达到目标工作点。
附图说明
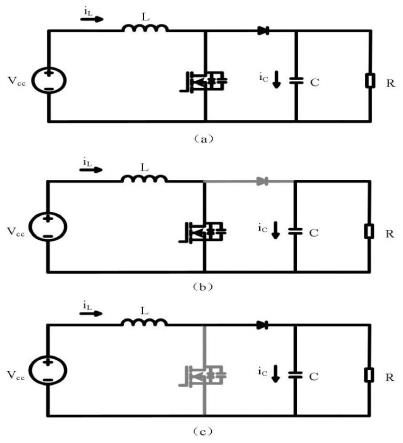
23.图1为boost变换器的简化电路原理图;
24.其中,(a)为拓扑结构图;(b)为开关管开通等效电路图;(c)为开关管关断等效电路图。
25.图2为boost变换器中开关管mosfet开通和关断的归一化轨迹图。
26.图3为本发明控制方法的结构框图。
27.图4为负载从轻载到重载时本发明简化最优时间动态控制图;
28.其中,(a)为输出电压和电感电流的相轨迹图,(b)为输出电压波形,(c)为电感电流波形。
29.图5为本发明改进后的adrc控制器结构框图。
30.图6为负载从轻载到重载时,本发明基于数字化最优时间动态控制的输出电压仿真图。
31.图7为负载跃变时,采用本发明控制方法的电感电流波形变化仿真图;
32.图8为传统自抗扰控制仿真波形图。
33.其中,(a)为输出电压仿真图;(b)为电感电流仿真图。
34.图9为时间最优的自然轨迹仿真波形图。
35.其中,(a)为输出电压仿真图;(b)为电感电流仿真图。
具体实施方式
36.为使本发明的目的、技术方案和优点更加清楚,下面结合实施方式和附图,对本发明作进一步地详细描述。
37.本发明控制方法针对具有非最小相位(nmp)系统的boost变换器设计,所述boost变换器的简化电路原理图如图1所示。其中,电路拓扑结构如图1(a),包括:电感(l)、电容(c)、开关管(s1)和二极管(d1);其中,开关管(s1)的漏极与电感的一端连接,开关管(s1)的源极与输入电源负极相连;二极管(d1)的阳极与电感的一端和开关管(s1)的漏极相连,二极管(d1)的阴极与输出电容(c)的一端连接,输出电容(c)的另一端与电源负极相连;输出电容(c)和负载(r)并联。图1(b)和图1(c)分别为开关管mosfet开通或关断等效电路图。当开关管mosfet开通时,电感电流储存能量,当开关管mosfet关断时,电感中储存的能量向负载传输。
38.对于上述变换器,为了消除状态变量的量纲获得一般性,对变量进行归一化处理,tn=t*fo,其中,vr为参考电压,fo为固有频率,l和c分别是电感感值和电容容值,zo为特征阻抗,
39.在开关管开通(u=1)和关断(u=0)时(u指的是mosfet开关管的状态,也是系统的控制输入),根据kcl和kvl定律,电感电流和输出电压的状态方程如下所示,
[0040][0041][0042]
其中,v
cc
是输入电压,i
l
是电感电流,vo是输出电压;
[0043]
假定boost变换器工作过程没有功率损耗,则输入功率等于输出功率,负载线定义如下:
[0044][0045]
当目标工作电压(输出电压等于期望电压)归一化的结果为v
on,t arget
=1,
[0046][0047]
该变换器的目标工作点为(v
on,target
,i
ln,target
),根据(3)和(4)可以确定。
[0048]
在目标工作点处开关管开通和关断时的常微分方程,得到归一化后电感电流和输出电压的相轨迹:
[0049][0050]
其中,u=0时,电感电流和输出电压的相轨迹是以(v
ccn
,i
on
)为圆心,以期望工作点到圆心(v
ccn
,i
on
)为半径的圆;而u=1时,电感电流和输出电压的相轨迹是经过点斜率为的直线。如图2所示,boost变换器的开通和关断轨迹在目标工作点处相切,理想情况下,系统到达稳态时,boost变换器在目标工作点附近做高频开通和关断切换。
[0051]
若输出电压不能为负,且boost变换器在稳态期间工作在连续导通模式(ccm)。
[0052]
一种boost变换器的相平面割线轨迹控制方法,其结构框图如图3所示,包括以下步骤:
[0053]
步骤1.判断boost变换器的电路处于稳态还是瞬态,如果是瞬态,进入步骤2;否则进入步骤3;
[0054]
步骤2.当负载从轻载到重载跃变时,在动态过程中选择暂态工作点来综合考虑输出电压下冲和恢复时间这两个指标,基于mosfet开关管开通和关断的自然轨迹到达目标工
作点,因此,理论上只要两个开关动作就可使系统达到稳态。具体过程如图4所示
[0055]
如图4.a所示,当负载从轻载向重载变化时,工作点3是下一时刻稳态点,工作点1是负载跃变过程的初始状态点,也是上一时刻稳态工作点。为了综合考虑电压下冲和恢复时间这两个指标,我们在工作点1,3中间选择了一个暂态工作点2’。根据上一节推导的升压变换器的开通和关断轨迹,我们可以得到,工作点3处的开通和关断轨迹分别为:
[0056][0057][0058]
其中,i
on3
是工作点3出的负载电流。
[0059]
而因为暂态工作点2’我们取的是工作点1和工作点3出的中间点,所以暂态点2’的坐标为在暂态点2’处的开通和关断轨迹分别为:
[0060][0061][0062]
根据公式6,8,通过比较我们可以得到在工作点3处和暂态点2处的开通轨迹的斜率大小关系为:
[0063][0064]
所以以暂态工作点2’为初始点,工作点3处的开通轨迹的斜率的直线与在暂态工作点2处的关断轨迹相交,即:直线2’5是暂态工作点2’处关断轨迹的割线。基于以上理论的分析,我们给出以下的两级切换控制律:
[0065][0066]
图4.a所示两级切换控制的电感电流和输出电压的相轨迹图,图4.b和图4.c分别表示输出电压和电感电流随时间变化的示意图。
[0067]
步骤3.当电路为稳态时,使用自抗扰控制控制器进行控制,其中,自抗扰控制控制器具体为,
[0068]
上式中,k1和k2为控制器增益,y
ref
为期望的输出电压,分别为扩张观测器观测到的输出电压和输出电压倒数,b0为控制输入的系数,为估计的扰动。其电路结构框图如图5所示,根据被控对象(boost升压变换器)的输出方程,得到扩张观测器eso的观测方程,eso分别观测出输出电压、输出电压导数和部分扰动的这三个值,最后根据pd控制和扰动值得到它的控制输入u。图中,y
ref
表示期望的输出电压,y为输出电压,bo是控制输入u的系数,b1是控制输入u导数的系数,c是低通滤波器的时间常数,z1,z2,z3分别是输出电压、输出电压导数和部分扰动的观测值;controller为pd控制器,plant为被控对象,extended state observe为扩张状态观测器;
[0069]
自抗扰控制器的具体设计过程为:
[0070]
将boost变换器的动力学方程经过线性化后整理成为adrc框架下的形式:
[0071][0072]
其中,ξ(t)代表系统内部扰动和外部扰动的净扰动,而y,u,分别表示输出电压、输出电压的一阶导数、输出电压的二阶导数,控制输入占空比以及导数;
[0073]
为了提高扩张观测器的效率,将极点信息合并到扩张观测器(eso)中以减轻观测
压力,将公式24表示为标称模型的形式如下:
[0074][0075]
其中令x1=y,x3=h,则增强状态空间模型的状态方程为:
[0076][0077]
其中是被假定为有界但是未知的。则eso的形式为:
[0078][0079]
其中是分别对y,h的估计,[w
o1
,w
o2
,w
o3
]
t
是观测器增益。令[z1,z2,z3]
t
是扩张观测器的输出,则:
[0080][0081]
公式15简化为:
[0082][0083]
其中:uo=k1(r-z1)-k2z2,[k1,k2]是控制器增益,则控制输入u为:
[0084]
u=(u
o-z3)/b0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0085]
基于带宽参数化技术,分别用wo和wc表示的观测器和控制器带宽。通过使用参数化观测器和控制器增益,简化了adrc方案中要调整的参数数量。选择观测器增益β
a1
=3wo,β
a2
=3w
o2
,β
a3
=w
o3
和控制器增益k1=w
c2
,k2=2wc。
[0086]
实施例1
[0087]
采用本发明控制方法对boost变化器进行控制仿真,当变化器的电路参数如表1所示时,控制器和观测器的增益选择为wc=500rad/s,wo=4500rad/s。
[0088]
电阻从5a到10a(轻载到重载)电压变化的仿真如图6所示,动态过程电感电流的变化如图7所示。从上述图中可以看出,负载从5a到10a跃变时,输出电压动态恢复时间大约1.13ms。到达输出电压的期望工作点,而且电压下冲最大值大约为47.8v左右,电压偏差大约为2.2v。到达工作点以后,切换到自抗扰控制器,而由于切换震荡,整个动态过程大约为10ms。
[0089]
图8所示的是基于自抗扰控制器的输出电压波形和电感电流波形图,其中,负载从10
ω
到5
ω
变化时,大约在10ms到达期望工作点,电压下冲最大值大约为46.8v,电压偏差大约为3.2v。
[0090]
图9所示的是基于最小恢复时间与自抗扰控制器相结合的输出电压和电感电流波形。其中负载从10
ω
到5
ω
变化时,达到期望工作点电压大约为0.6ms,考虑由于切换引起的震荡,系统动态响应的时间大约为8ms左右,电压下冲最小值为46.87v,电压偏差大约为
3.13v。
[0091]
综合以上分析方法,我们发现,不论是自抗扰控制(图8),或者只考虑最小恢复时间(图9),在最小电压偏差和较快的动态响应这两个指标之间都有各自的优越的性能。而本文提出的分级切换控制较好的反映了恢复时间和电压偏差之间的平衡。
[0092]
表1
[0093]
参数值v
cc
30vvo50vfs100khzl500μhc1000μfd0.4r50ω
[0094]
以上所述,仅为本发明的具体实施方式,本说明书中所公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的的替代特征加以替换;所公开的所有特征、或所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以任何方式组合。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。