1.本实用新型涉及量具领域,尤其涉及一种带有自动测量装置的抓取机械手。
背景技术:
2.随着工业机械生产行业的发展,不同型号的环形工件被生产出来,并被应用在各个领域,在环形工件出厂前,需对其内外径进行检测,避免其质量不合格。
3.现有技术中,对环形工件的测量是人工采用游标卡尺量进行测量,测量时,需要工人用手拨动游标,然后读取数值,且环形工件需要测量多个方位的内径,检测其内圆标准性,采用游标卡尺多次测量效率较低;为此,本实用新型提出一种内孔直径全自动检测装置用于解决上述问题。
技术实现要素:
4.本实用新型目的是:提供一种带有自动测量装置的抓取机械手,以解决现有技术中存在的环形工件需要人工测量带来的效率低下的问题。
5.本实用新型的技术方案是:一种带有自动测量装置的抓取机械手,包括一对夹持装置以及驱动夹持装置进行开合运动的驱动器,所述夹持装置连接有光栅尺,所述光栅尺完成对环形工件内径或外径的测量。
6.优选的,所述驱动器采用平行手指气缸,包括缸体和驱动夹持装置的气动手指;
7.所述夹持装置包括与气动手指固定的测量臂,所述测量臂上安装有夹持器,所述测量臂带动夹持器用于夹持环形工件;
8.所述光栅尺与测量臂连接,包括标尺光栅和与之滑动配合的光栅读数块。
9.优选的,所述测量臂沿被夹持的环形工件的径向开有供夹持器安装的通槽;任意所述测量臂与光栅读数块固定,另一个测量臂与标尺光栅固定;当所述测量臂进行开合运动时,所述光栅读数块与标尺光栅之间发生相对运动。
10.优选的,所述夹持器包括本体,所述本体嵌入设置于通槽中,并通过螺栓固定其在通槽中的任意位置;所述本体上安装有呈竖直排列的两个夹头,一对所述本体上的四个夹头将环形工件的位置限定,并使环形工件的轴线与四个夹头所形成的矩形的中心相交。
11.优选的,所述夹头包括与本体连接的第一部分和与第一部分固定的第二部分;所述第二部分用于限定环形工件沿自身轴向的运动;所述第一部分与本体螺纹配合,用于调节第二部分与本体之间的间隙,从而搭载不同厚度的环形工件。
12.与现有技术相比,本实用新型的优点是:
13.(1)本实用新型采用光栅尺作为测量设备,并以平行手指气缸提供动力,使整套装置可以实现自动测量,提高了设备的自动化程度。
14.(2)本实用新型采用光栅尺代替游标卡尺作为测量工具,读数快速且准确。
15.(3)通过不同的夹持方式,本实用新型可以测量环形工件的外径以及内径,实用性强。
附图说明
16.下面结合附图及实施例对本实用新型作进一步描述:
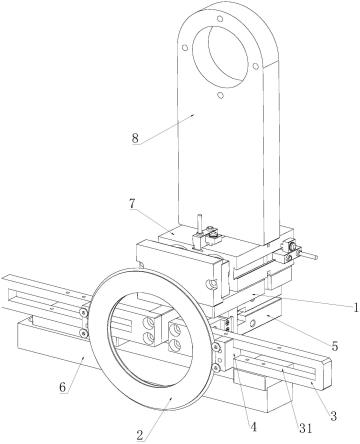
17.图1为本实用新型所述一种带有自动测量装置的抓取机械手结构图;
18.图2为本实用新型所述一种带有自动测量装置的抓取机械手结构图;
19.图3为本实用新型所述测量臂结构图;
20.图4为本实用新型所述夹持器结构图;
21.其中:1、支架,2、环形工件,3、测量臂,31、通槽,4、夹持器,41、本体,42、夹头,421、第一部分,422、第二部分,5、平行手指气缸,51、缸体,52、气动手指,6、光栅尺,61、标尺光栅,62、光栅读数块,7、双轴气缸,8、单摆臂。
具体实施方式
22.下面结合具体实施例,对本实用新型的内容做进一步的详细说明:
23.如图1所示,一种带有自动测量装置的抓取机械手,包括支架1,支架1上方安装有双轴气缸7和单摆臂8,支架1下方安装有一对用于夹持环形工件2的夹持装置,和驱动夹持装置进行开合运动的驱动器,以及与夹持装置相连的光栅尺6。
24.如图2所示,驱动器设置为平行手指气缸5,包括固定于支架1内的缸体51和驱动夹持装置的气动手指52。光栅尺6包括标尺光栅61和与之滑动配合的光栅读数块62。
25.在本实施例中,平行手指气缸5、夹持装置以及光栅尺6均为水平设置。夹持装置包括测量臂3和夹持器4。其中,如图3所示,测量臂3设置为长短两边且相互垂直的l型结构,其短边与气动手指52通过螺栓固定,长边沿被夹持的环形工件2的径向开有一道通槽31,用于安装夹持器4。测量臂3下方连接光栅尺6,本实施例中,一个测量臂3与光栅读数块62固定,另一个测量臂3与标尺光栅61固定。故当两个测量臂3进行开合运动时,光栅读数块62与标尺光栅61发生相对运动并对环形工件2进行测量。
26.如图4所示,夹持器4包括本体41和夹头42。其中,本体41设置为t型结构,包括t头和t尾。t尾嵌入设置于通槽31中并通过螺栓将其固定在通槽31中的任意位置,进而适配不同直径的环形工件2。t头上安装有呈竖直排列的两个夹头42,故设置于两个测量臂3中的两个本体41即拥有四个夹头42。四个夹头42呈矩形分布将环形工件2的位置限定,并使环形工件2的轴线与该矩形的中心相交从而保证测量结果准确。
27.夹头42包括第一部分421和与第一部分421固定的第二部分422,第一部分421和第二部分422均为圆柱形结构,且第二部分422的直径大于第一部分421。四个夹头42的第一部分421在平行手指气缸5的作用下与环形工件2的外径或内径相抵,又因第二部分422的直径大于第一部分421,故可将环形工件2限定于第二部分422与本体41之间的空间,从而约束环形工件2沿自身轴向的运动。因第一部分421与本体41采用螺纹配合,故可以调节第二部分422与本体41之间的间隙,从而搭载不同厚度的环形工件2。在本实施例中,夹头42选用螺栓。
28.工作时:
29.一、测量环形工件2的外径:
30.1.控制平行手指气缸5,将测量臂3张开,并通过双轴气缸7和单摆臂8移动夹头42至待测量的环形工件2同一平面处,且四个夹头42的中心处于待测量环形工件2的轴线上。
31.2.将测量臂3合拢并夹紧环形工件2外径,记录光栅尺6读数;随后张开测量臂3,将环形工件2旋转任意角度,按上述步骤测量环形工件2至少三处外径尺寸。
32.二、测量环形工件2的内径:
33.1.控制平行手指气缸5,将测量臂3合拢,并通过双轴气缸7和单摆臂8移动夹头42至待测量的环形工件2同一平面处,且四个夹头42的中心处于待测量环形工件2的轴线上。
34.2.将测量臂3张开并撑紧环形工件2内径,记录光栅尺6读数;随后合拢测量臂3,将环形工件2旋转任意角度,按上述步骤测量环形工件2至少三处内径尺寸。
35.将工件取下,结合三处环形工件2的外径和内径的测量尺寸判断该环形工件2是否合格。
36.上述实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型,因此无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。