1.本发明涉及超宽带技术领域,尤其涉及一种地下建筑工程定位方法。
背景技术:
2.超宽带(ultra wide band,uwb)高精度定位技术,定位精度可达厘米级,其中采用双向tof(time of flight,飞行时间)异步定位方法、tdoa(time difference of arrival,到达时间差)同步定位方法。
3.双向tof异步定位方法中,定位标签发送轮询(poll)消息,测量并记录超宽带信号的发送时间t1;定位基站接收到poll消息后,测量并记录超宽带信号中第一径信号的接收时间t2;定位基站发送响应(response)消息,测量并记录超宽带信号的发送时间为t3;定位标签接收response消息,测量并记录超宽带信号中第一径信号的接收时间t4;定位标签发送最终(final)消息,测量并记录超宽带信号的发送时间t5,其中,final消息中包含定位标签记录的t1、t4和t5;定位基站接收final消息,测量并记录超宽带信号中第一径信号的接收时间t6。因此,定位基站获得所有的发送时间和接收时间,即t1、t2、t3、t4、t5和t6。定位基站通过如下公式计算得到测距结果:
4.t
round1
=t4-t1
5.t
round2
=t6-t3
6.t
reply1
=t3-t2
7.t
reply2
=t5-t4
[0008][0009]
此外,定位基站通过获得定位标签超宽带信号的发送相位和接收相位计算得到测角结果。tdoa同步定位方法通过检测超宽带信号到达两个定位基站的绝对时间差,而不是到达的飞行时间来确定定位标签的位置,利用定位标签到达2个定位基站的时间toa(time of arrival,到达时间),取其差值来获得,需要定位基站之间时间的严格同步,时间同步精度为纳秒级(10-9
s),才能满足超宽带的测距精度和定位精度要求。
[0010]
现有超宽带高精度定位方法,其定位精度的基础与关键是测距结果、测角结果的精度。视距(line of sight,los)环境下,测距结果、测角结果的精度高;非视距(non line of sight,nlos)环境下,测距结果、测角结果的精度低。同时,定位基站提供的位置信息需要精确,用于获得定位目标的精确定位信息。在隧道、煤矿等地下建筑工程环境中,作业设备不断推进,可能伴随有爆破作业,不宜部署固定的定位基站。当定位基站安装在作业设备上时,其位置信息是动态变化的。因此,由于地下作业区域的环境复杂以及定位基站的移动性,定位精度无法满足精确定位的要求。
技术实现要素:
[0011]
本发明公开了一种地下建筑工程定位方法,解决了隧道、煤矿等地下建筑工程环
境中的精确定位问题。
[0012]
本发明实施例提供一种地下建筑工程定位方法,包括:
[0013]
获得至少一个第一定位设备的测量结果,所述测量结果是测距结果和/或测角结果;
[0014]
获得第二定位设备的固定位置信息,所述至少一个第一定位设备的测量基准定位设备是所述第二定位设备和/或所述第一定位设备;
[0015]
所述至少一个第一定位设备是部署在隧道、煤矿等地下建筑工程的作业区域中作业设备上的定位设备;
[0016]
所述第二定位设备是部署在隧道、煤矿等地下建筑工程的完工区域中的定位设备;
[0017]
根据所述至少一个第一定位设备的测量结果、所述第二定位设备的固定位置信息,获得所述至少一个第一定位设备的动态位置信息;
[0018]
根据所述至少一个第一定位设备的动态位置信息,获得移动实体的高精度定位结果。
[0019]
可选的,获得至少一个第一定位设备的测量结果,所述测量结果是测距结果和/或测角结果,包括:
[0020]
通过中值滤波获得至少一个第一定位设备的测量结果,即对测距结果和/或测角结果进行中值滤波,滤除少量奇异的测距结果和/或测角结果;和/或,
[0021]
通过标准差滤波获得至少一个第一定位设备的测量结果,即对测距结果和/或测角结果进行标准差滤波,滤除标准差超过门限的测距结果和/或测角结果。
[0022]
可选的,根据所述至少一个第一定位设备的测量结果、所述第二定位设备的固定位置信息,获得所述至少一个第一定位设备的动态位置信息,包括:
[0023]
当所述至少一个第一定位设备的测量结果是有效值时,计算所述至少一个第一定位设备和所述第二定位设备的相对位置信息;
[0024]
根据所述第二定位设备的固定位置信息、所述至少一个第一定位设备和所述第二定位设备的相对位置信息,计算所述至少一个第一定位设备的动态位置信息;或者,
[0025]
当所述至少一个第一定位设备的测量结果是无效值时,延用上一次所述至少一个第一定位设备的动态位置信息;或者,
[0026]
当所述至少一个第一定位设备的测量结果是无效值时,使用预设测距值和/或测角值计算所述至少一个第一定位设备和所述第二定位设备的相对位置信息;
[0027]
根据所述第二定位设备的固定位置信息、所述至少一个第一定位设备和所述第二定位设备的相对位置信息,计算所述至少一个第一定位设备的动态位置信息。
[0028]
可选的,根据所述至少一个第一定位设备的动态位置信息获得移动实体的高精度定位结果,包括:
[0029]
所述移动实体是隧道、煤矿等地下建筑工程中的人员、车辆、设备等;
[0030]
所述移动实体和定位标签进行绑定,通过所述至少一个第一定位设备进行零维、一维、二维、三维高精度定位,根据所述至少一个第一定位设备的动态位置信息获得所述移动实体的高精度定位结果;
[0031]
所述移动实体的高精度定位结果包括以下信息中的一种或多种:人员信息、车辆
信息、设备信息、定位标签信息、坐标信息、状态信息。
[0032]
可选的,所述方法还包括:
[0033]
所述移动实体的高精度定位结果用于所述移动实体的管理和应用;
[0034]
所述移动实体的管理和应用包括以下功能中的一种或多种:定位管理、轨迹管理、时间管理、视频管理、工效分析应用。
[0035]
可选的,所述方法还包括:
[0036]
第三设备下发所述至少一个第一定位设备的测量指示消息,所述测量指示消息是周期式下发或事件触发式下发;
[0037]
所述测量指示消息包括以下信息中的一种或多种:测量基准定位设备的标识、测量对象定位设备的标识、测量对象定位设备的工作频率、测量对象定位设备的测量量;
[0038]
所述第三设备接收所述至少一个第一定位设备的测量结果消息,所述测量结果消息包括以下信息中的一种或多种:测量基准定位设备的标识、测量对象定位设备的标识、测量对象定位设备的测量量对应的测量结果;
[0039]
所述第三设备根据所述至少一个第一定位设备的测量结果、所述第二定位设备的固定位置信息,获得所述至少一个第一定位设备的动态位置信息;
[0040]
所述第三设备根据所述至少一个第一定位设备的动态位置信息,获得移动实体的高精度定位结果。
[0041]
可选的,所述方法还包括:
[0042]
第三设备下发所述至少一个第一定位设备的调频指示消息,所述调频指示消息是周期式下发或事件触发式下发;
[0043]
所述调频指示消息包括定位设备的标识、定位设备的工作频率;
[0044]
所述第三设备接收所述至少一个第一定位设备的工作频率消息,所述工作频率消息包括定位设备的标识、定位设备的工作频率;
[0045]
所述第三设备根据所述至少一个第一定位设备的工作频率确定所述至少一个第一定位设备处于测量状态或者节电状态。
[0046]
可选的,所述方法还包括:
[0047]
所述第二定位设备是定位基站;
[0048]
所述至少一个第一定位设备是定位基站和/或定位标签;
[0049]
当所述至少一个第一定位设备是定位基站和定位标签联合使用时,所述定位标签辅助所述定位基站进行测量;或者,
[0050]
当所述至少一个第一定位设备是定位基站和定位标签联合使用时,所述定位标签辅助所述定位基站进行定位。
[0051]
可选的,所述方法还包括:
[0052]
当所述至少一个第一定位设备是定位基站和定位标签联合使用时,如果所述定位标签辅助所述定位基站进行定位,那么根据所述移动实体和所述定位基站的测量结果获得所述移动实体和所述定位标签的测量结果;
[0053]
根据所述定位基站的动态位置信息、所述定位标签的动态位置信息、所述移动实体和所述定位基站的测量结果、所述移动实体和所述定位标签的测量结果,获得所述移动实体的高精度定位结果。
assistant,pda)、移动上网装置(mobile internet device,mid)或可穿戴式设备(wearable device)等终端侧设备。上述作业设备可以是隧道中的台车、风钻、混凝土泵等掘进设备和衬砌设备,也可以是煤矿中的矿车、串车、掘进钻车等。例如,二衬台车、掌子面台车、凿岩台车、衬砌台车等。需要说明的是,在本发明实施例中并不限定定位基站、定位标签、作业设备的具体类型。
[0068]
在具体实施中,由于隧道、煤矿等地下建筑工程的作业区域中作业设备不断推进,可能伴随有爆破作业,不宜部署固定的定位设备,因此一个或多个第一定位设备可以部署在作业设备上,作业设备上的定位设备的位置信息是动态变化的。第二定位设备可以部署在隧道、煤矿等地下建筑工程的完工区域,作为第一定位设备的测量基准定位设备,其位置信息是固定的。当有多个第一定位设备时,任一个第一定位设备是测量对象定位设备时,其测量基准定位设备可以是第二定位设备,也可以是相邻的第一定位设备。测量基准定位设备和测量对象定位设备之间是视距传输的。
[0069]
例如,可以将2个定位基站、2个定位标签安装在隧道的二衬台车上,将1个定位标签安装在隧道的掌子面台车上,将1个定位基站安装在二衬台车附近的正洞墙壁上,正洞墙壁上的定位基站和二衬台车上定位基站、定位标签之间是视距传输的,二衬台车上的定位基站、定位标签和掌子面台车上的定位标签是视距传输的;也可以将2个定位基站安装在煤矿的矿车上,将1个定位标签安装在煤矿的掘进钻车上,将1个定位基站安装在矿车附近的巷道墙壁上,巷道墙壁上的定位基站和矿车上的定位基站之间是视距传输的。
[0070]
可选的,获得至少一个第一定位设备的测量结果,所述测量结果是测距结果和/或测角结果,包括:
[0071]
通过中值滤波获得至少一个第一定位设备的测量结果,即对测距结果和/或测角结果进行中值滤波,滤除少量奇异的测距结果和/或测角结果;和/或,
[0072]
通过标准差滤波获得至少一个第一定位设备的测量结果,即对测距结果和/或测角结果进行标准差滤波,滤除标准差超过门限的测距结果和/或测角结果。
[0073]
在具体实施中,获得至少一个第一定位设备的测量结果包含以下2种方式:
[0074]
方式1:通过中值滤波获得至少一个第一定位设备的测量结果,即对测距结果和/或测角结果进行中值滤波。中值滤波可以滤除少量波动较大的奇异测量值,解决隧道、煤矿等地下建筑工程复杂环境下测量结果小概率错误的问题。
[0075]
具体的,可以设置中值滤波的滤波窗长,如果中值点为n,那么滤波窗长为2n 1。当滤波窗长内有2n 1个测距结果时,那么取中值点的测距结果为有效值;当滤波窗长内没有2n 1个测距结果时,那么测距结果为无效值。当滤波窗长内有2n 1个测角结果时,那么取中值点的测角结果为有效值;当滤波窗长内没有2n 1个测角结果时,那么测角结果为无效值。当滤波窗长内有2n 1个测距结果和2n 1个测角结果时,那么取中值点的测距结果和测角结果为有效值。当滤波窗长内没有2n 1个测距结果、测角结果时,那么测距结果、测角结果为无效值。
[0076]
方式2:通过标准差滤波获得至少一个第一定位设备的测量结果,即对测距结果、测角结果进行标准差滤波。标准差滤波可以滤除标准差超过门限的测距结果和/或测角结果,解决隧道、煤矿等地下建筑工程复杂环境下测距结果、测角结果波动大时大概率错误的问题。
[0077]
具体的,可以设置标准差滤波的滤波门限。当测距结果的标准差没有超过滤波门限,那么该测距结果为有效值;当测距结果的标准差超过滤波门限,那么该测距结果为无效值。当测角结果的标准差没有超过滤波门限,那么该测角结果为有效值;当测角结果的标准差超过滤波门限,那么该测角结果为无效值。当测距结果的标准差和测角结果的标准差没有超过滤波门限,那么该测距结果和测角结果为有效值;当测距结果的标准差、测角结果的标准差超过滤波门限,那么该测距结果、测角结果为无效值。
[0078]
进一步的,方式1和方式2可以分别用于获得至少一个第一定位设备的测量结果,也可以同时用于获得至少一个第一定位设备的测量结果。
[0079]
可选的,根据所述至少一个第一定位设备的测量结果、所述第二定位设备的固定位置信息,获得所述至少一个第一定位设备的动态位置信息,包括:
[0080]
当所述至少一个第一定位设备的测量结果是有效值时,计算所述至少一个第一定位设备和所述第二定位设备的相对位置信息;
[0081]
根据所述第二定位设备的固定位置信息、所述至少一个第一定位设备和所述第二定位设备的相对位置信息,计算所述至少一个第一定位设备的动态位置信息;或者,
[0082]
当所述至少一个第一定位设备的测量结果是无效值时,延用上一次所述至少一个第一定位设备的动态位置信息;或者,
[0083]
当所述至少一个第一定位设备的测量结果是无效值时,使用预设测距值和/或测角值计算所述至少一个第一定位设备和所述第二定位设备的相对位置信息;
[0084]
根据所述第二定位设备的固定位置信息、所述至少一个第一定位设备和所述第二定位设备的相对位置信息,计算所述至少一个第一定位设备的动态位置信息。
[0085]
在具体实施中,获得所述至少一个第一定位设备的动态位置信息包含以下3种方式:
[0086]
方式1:当至少一个第一定位设备的测量结果是有效值时,计算至少一个第一定位设备和第二定位设备的相对位置信息;根据第二定位设备的固定位置信息、至少一个第一定位设备和第二定位设备的相对位置信息,计算至少一个第一定位设备的动态位置信息。
[0087]
具体的,当第一定位设备的测距结果是有效值时,可以计算第一定位设备和第二定位设备的相对距离,再根据第二定位设备的固定位置坐标计算第一定位设备的动态位置坐标。进一步的,当第一定位设备的测量基准定位设备是第二定位设备时,第一定位设备和第二定位设备的相对距离是第一定位设备和第二定位设备的测距结果;当第一定位设备的测量基准定位设备是相邻的第一定位设备时,第一定位设备和第二定位设备的相对距离是第一定位设备和相邻的第一定位设备的测距结果、相邻的第一定位设备和第二定位设备的测距结果的累计值。在第二定位设备的固定位置坐标基础上,结合第一定位设备和第二定位设备的相对距离计算第一定位设备的动态位置坐标。或者,在第二定位设备的固定位置坐标基础上,先结合相邻的第一定位设备和第二定位设备的相对距离计算相邻的第一定位设备的动态位置坐标,再结合第一定位设备和相邻的第一定位设备的相对距离计算第一定位设备的动态位置坐标。当第一定位设备的测角结果是有效值时,可以计算第一定位设备和第二定位设备的相对角度,再根据第二定位设备的固定位置坐标计算第一定位设备的动态位置坐标。当第一定位设备的测距结果和测角结果是有效值时,可以计算第一定位设备和第二定位设备的相对距离和相对角度,再根据第二定位设备的固定位置坐标计算第一定
位设备的动态位置坐标。
[0088]
方式2:当至少一个第一定位设备的测量结果是无效值时,延用上一次至少一个第一定位设备的动态位置信息。
[0089]
具体的,当第一定位设备的测距结果和/或测角结果是无效值时,如果保留上一次第一定位设备的动态位置坐标,并且时效性满足要求,那么延用上一次第一定位设备的动态位置坐标。方式3:当至少一个第一定位设备的测量结果是无效值时,使用预设测距值和/或测角值计算至少一个第一定位设备和第二定位设备的相对位置信息;根据第二定位设备的固定位置信息、至少一个第一定位设备和第二定位设备的相对位置信息,计算至少一个第一定位设备的动态位置信息。
[0090]
具体的,当第一定位设备的测距结果和/或测角结果是无效值时,如果没有保留上一次第一定位设备的动态位置坐标,或者保留上一次第一定位设备的动态位置坐标但是时效性不满足要求,那么使用预设测距值和/或测角值计算第一定位设备和第二定位设备的相对距离和/或相对角度,再根据第二定位设备的固定位置坐标计算第一定位设备的动态位置坐标。
[0091]
可选的,根据所述至少一个第一定位设备的动态位置信息获得移动实体的高精度定位结果,包括:
[0092]
所述移动实体是隧道、煤矿等地下建筑工程中的人员、车辆、设备等;
[0093]
所述移动实体和定位标签进行绑定,通过所述至少一个第一定位设备进行零维、一维、二维、三维高精度定位,根据所述至少一个第一定位设备的动态位置信息获得所述移动实体的高精度定位结果;
[0094]
所述移动实体的高精度定位结果包括以下信息中的一种或多种:人员信息、车辆信息、设备信息、定位标签信息、坐标信息、状态信息。
[0095]
在具体实施中,至少一个第一定位设备的动态位置信息用于获得超宽带高精度定位管理系统中移动实体的高精度定位结果。超宽带高精度定位管理系统可以是基于超宽带高精度定位技术的管理平台,提供基于位置信息的高层应用服务;也可以是基于超宽带高精度定位技术的软硬件系统,硬件包含定位标签、定位基站、摄像头、服务器、nfc(near field communication,近场通信)读卡器等,软件包含定位引擎、管理平台、视频服务、视频播放器、nfc服务等。定位引擎(positioning engine)根据定位基站上报的测距结果、测角结果计算定位标签的精确位置,管理平台提供基于位置的应用服务,视频服务提供视频联动相关的实时流、回放流服务,视频播放器提供客户端的视频播放服务,nfc服务提供定位标签扫描、身份证扫描等服务。移动实体可以是隧道、煤矿等地下建筑工程中的人员、车辆、设备等。每个定位标签都具有唯一标识码,例如,通用唯一识别码(universally unique identifier,uuid),将移动实体与定位标签进行一一绑定,定位标签和至少一个第一定位设备进行零维、一维、二维、三维高精度定位,超宽带高精度定位管理系统可以实现对移动实体的实时精确定位与跟踪,获得移动实体的超宽带高精度定位结果。
[0096]
在具体实施中,人员信息包括人员的姓名、工号、性别、身份证号、年龄、岗位类别、职位、手机号等,车辆信息包括车辆的名称、编号、品牌、型号、驾驶人员、分组等,设备信息包括设备的名称、编号、品牌、型号、运维人员、分组等,定位标签信息包括定位标签的编号、类型、绑定时间、绑定状态、定位频率等,坐标信息包括移动实体的坐标、地图编号、地图名
称等,状态信息包括定位标签的报警状态、电量等。
[0097]
可选的,所述方法还包括:
[0098]
所述移动实体的高精度定位结果用于所述移动实体的管理和应用;
[0099]
所述移动实体的管理和应用包括以下功能中的一种或多种:定位管理、轨迹管理、时间管理、视频管理、工效分析应用。
[0100]
在具体实施中,定位管理包括实时定位跟踪等,轨迹管理包括历史轨迹回放等,时间管理包括履历查询、作业时间查询等,视频管理包括视频实时流播放、视频回放等,工效分析应用包括热谱图查询和回放等。
[0101]
可选的,所述方法还包括:
[0102]
第三设备下发所述至少一个第一定位设备的测量指示消息,所述测量指示消息是周期式下发或事件触发式下发;
[0103]
所述测量指示消息包括以下信息中的一种或多种:测量基准定位设备的标识、测量对象定位设备的标识、测量对象定位设备的工作频率、测量对象定位设备的测量量;
[0104]
所述第三设备接收所述至少一个第一定位设备的测量结果消息,所述测量结果消息包括以下信息中的一种或多种:测量基准定位设备的标识、测量对象定位设备的标识、测量对象定位设备的测量量对应的测量结果;
[0105]
所述第三设备根据所述至少一个第一定位设备的测量结果、所述第二定位设备的固定位置信息,获得所述至少一个第一定位设备的动态位置信息;
[0106]
所述第三设备根据所述至少一个第一定位设备的动态位置信息,获得移动实体的高精度定位结果。
[0107]
在具体实施中,第三设备可以是一台或多台服务器。服务器是集中控制处理节点,可以管理和控制多个定位基站和定位标签,可以计算定位标签的位置信息,可以提供基于位置信息的高层应用服务。例如,独立的局域网节点,或者独立的接入网节点:本地网关(local gateway)或本地控制器(local controller),或者核心网节点或者oam(operation administration and maintenance,操作、管理和维护)节点。需要说明的是,在本发明实施例中并不限定服务器的具体类型。服务器可以承载多个软件,包含定位引擎、管理平台、视频服务、视频播放器、nfc服务等。当第三设备是多台服务器时,定位服务器可以承载定位引擎软件,应用服务器可以承载管理平台软件。
[0108]
在具体实施中,第三设备下发至少一个第一定位设备的测量指示消息包括以下2种方式:
[0109]
方式1:第三设备周期式下发测量指示消息。具体的,开启周期定时器,每间隔t第三设备下发测量指示消息。
[0110]
方式2:第三设备事件触发式下发测量指示消息。具体的,当通过管理平台的用户界面点击测量按钮时,第三设备下发测量指示消息。或者,当系统启动/重启时,第三设备下发测量指示消息。
[0111]
测量指示消息包括测量基准定位设备的标识、测量对象定位设备的标识、测量对象定位设备的工作频率、测量对象定位设备的测量量等。具体的,测量指示消息包括第一定位设备标识、第二定位设备标识、相邻第一定位设备标识、第一定位设备的工作频率、第一定位设备的测距量、第一定位设备的测角量等。
[0112]
在具体实施中,第三设备接收所述至少一个第一定位设备的测量结果消息,测量结果消息包括测量基准定位设备的标识、测量对象定位设备的标识、测量对象定位设备的测量量对应的测量结果等。具体的,测量结果消息包括第一定位设备标识、第二定位设备标识、相邻第一定位设备标识、第一定位设备的测距结果、第一定位设备的测角结果等。
[0113]
在具体实施中,第三设备可以通过中值滤波获得至少一个第一定位设备的测量结果,即对测距结果和/或测角结果进行中值滤波,也可以通过标准差滤波获得至少一个第一定位设备的测量结果,即对测距结果、测角结果进行标准差滤波。第三设备根据至少一个第一定位设备的测量结果、第二定位设备的固定位置信息,获得至少一个第一定位设备的动态位置信息。第三设备根据所述至少一个第一定位设备的动态位置信息,获得移动实体的高精度定位结果。以上方法可以参见系统中已说明的实施,重复之处不再赘述。
[0114]
可选的,所述方法还包括:
[0115]
第三设备下发所述至少一个第一定位设备的调频指示消息,所述调频指示消息是周期式下发或事件触发式下发;
[0116]
所述调频指示消息包括定位设备的标识、定位设备的工作频率;
[0117]
所述第三设备接收所述至少一个第一定位设备的工作频率消息,所述工作频率消息包括定位设备的标识、定位设备的工作频率;
[0118]
所述第三设备根据所述至少一个第一定位设备的工作频率确定所述至少一个第一定位设备处于测量状态或者节电状态。
[0119]
在具体实施中,第三设备下发所述至少一个第一定位设备的调频指示消息包括以下2种方式:方式1:第三设备周期式下发调频指示消息。具体的,开启周期定时器,每间隔t第三设备向至少一个第一定位设备下发调频指示消息。
[0120]
方式2:第三设备事件触发式下发调频指示消息。具体的,当第三设备下发测量指示消息之前,第三设备向至少一个第一定位设备下发调频指示消息。或者,当第三设备获得至少一个第一定位设备的动态位置信息之后,第三设备向至少一个第一定位设备下发调频指示消息。调频指示消息包括定位设备的标识、定位设备的工作频率等。具体的,调频指示消息包括第一定位设备标识、第一定位设备的工作频率等。当第一定位设备的工作频率大于等于1hz时,例如1hz、2hz、5hz、10hz等,可以有效的获得第一定位设备的测量结果。当第一定位设备的工作频率小于1hz时,例如0.01hz、0.1hz、0.2hz、0.5hz等,可以有效的降低第一定位设备的耗电量。
[0121]
在具体实施中,第三设备接收所述至少一个第一定位设备的工作频率消息,工作频率消息包括定位设备的标识、定位设备的工作频率等。具体的,工作频率消息包括第一定位设备标识、第一定位设备的工作频率等。第三设备根据至少一个第一定位设备的工作频率确定至少一个第一定位设备处于测量状态或者节电状态。具体的,当第一定位设备的工作频率大于等于1hz时,例如1hz、2hz、5hz、10hz等,第三设备确定第一定位设备处于测量状态。当第一定位设备的工作频率小于1hz时,例如0.01hz、0.1hz、0.2hz、0.5hz等,第三设备确定第一定位设备处于节电状态。
[0122]
进一步的,在第一定位设备测量之前,第三设备下发调频指示消息,调频指示消息中包含的第一定位设备的工作频率大于等于1hz。第三设备通过接收第一定位设备的工作频率消息确定第一定位设备处于工作状态后,再下发测量指示消息。在第三设备获得第一
定位设备的动态位置信息之后,第三设备下发调频指示消息,调频指示消息中包含的第一定位设备的工作频率小于1hz。第三设备通过接收第一定位设备的工作频率消息确定第一定位设备处于节电状态。这样可以降低第一定位设备在动态测量过程中的耗电量,特别是第一定位设备是电池供电时,可以实现第一定位设备的低功耗长续航。
[0123]
可选的,所述方法还包括:
[0124]
所述第二定位设备是定位基站;
[0125]
所述至少一个第一定位设备是定位基站和/或定位标签;
[0126]
当所述至少一个第一定位设备是定位基站和定位标签联合使用时,所述定位标签辅助所述定位基站进行测量;或者,
[0127]
当所述至少一个第一定位设备是定位基站和定位标签联合使用时,所述定位标签辅助所述定位基站进行定位。
[0128]
在具体实施中,第二定位设备可以是部署在隧道、煤矿等地下建筑工程的完工区域中的定位基站,至少一个第一定位设备可以是部署在隧道、煤矿等地下建筑工程的作业区域中作业设备上的定位基站和/或定位标签。至少一个第一定位设备是定位基站和定位标签联合使用包含以下2种方式:
[0129]
方式1:定位标签辅助定位基站进行测量。
[0130]
具体的,定位基站和定位标签部署在相同的作业设备上,定位基站和定位标签的位置信息相同,定位标签和测量基准定位设备进行测量,获得定位标签的测量结果,从而获得定位标签的动态位置信息,可以作为定位基站的动态位置信息。进一步的,由于部署环境受限,定位基站和定位标签部署在相同的作业设备上的相邻位置,已知定位基站和定位标签的相对位置,定位标签和测量基准定位设备进行测量,获得定位标签的测量结果,从而获得定位标签的动态位置信息,结合已知定位基站和定位标签的相对位置,可以获得定位基站的动态位置信息。方式2:定位标签辅助定位基站进行定位。
[0131]
具体的,定位基站和定位标签部署在不同的作业设备上,定位基站和定位标签的位置信息不相同,定位基站、定位标签分别和对应的测量基准定位设备进行测量,获得定位基站和定位标签的测量结果,从而获得定位基站和定位标签的动态位置信息。定位标签辅助定位基站进行定位,获得移动实体的高精度定位结果。进一步的,定位基站是定位标签的测量基准定位设备,定位标签和定位基站进行测量,获得定位标签的测量结果,从而获得定位标签的动态位置信息。
[0132]
可选的,所述方法还包括:
[0133]
当所述至少一个第一定位设备是定位基站和定位标签联合使用时,如果所述定位标签辅助所述定位基站进行定位,那么根据所述移动实体和所述定位基站的测量结果获得所述移动实体和所述定位标签的测量结果;
[0134]
根据所述定位基站的动态位置信息、所述定位标签的动态位置信息、所述移动实体和所述定位基站的测量结果、所述移动实体和所述定位标签的测量结果,获得所述移动实体的高精度定位结果。
[0135]
在具体实施中,当至少一个第一定位设备是定位基站和定位标签联合使用时,定位基站和定位标签部署在不同的作业设备上,定位标签辅助定位基站进行定位。与移动实体绑定的定位标签和定位基站进行测量,获得移动实体和定位基站的测距结果和/或测角
结果,根据定位基站的动态位置信息、定位标签的动态位置信息、移动实体和定位基站的测距结果和/或测角结果,可以推导获得移动实体和定位标签的测距结果和/或测角结果,进而获得移动实体的高精度定位结果。进一步的,1个定位标签可以辅助定位基站进行一维定位,2个定位标签可以辅助定位基站进行二维定位,3个定位标签可以辅助定位基站进行三维定位。
[0136]
参见图2,本发明实施例提供的第一定位设备和第二定位设备进行测量的定位方法流程示意图,如图2所示,包括以下步骤:
[0137]
201:至少一个第一定位设备和第二定位设备进行测量;
[0138]
202:获得至少一个第一定位设备的测量结果;
[0139]
203:获得第二定位设备的固定位置信息;
[0140]
204:根据至少一个第一定位设备的测量结果、第二定位设备的固定位置信息,获得至少一个第一定位设备的动态位置信息;
[0141]
205:根据至少一个第一定位设备的动态位置信息,获得移动实体的高精度定位结果。
[0142]
在具体实施中,至少一个第一定位设备和第二定位设备进行测量,至少一个第一定位设备通过中值滤波和/或标准差滤波获得至少一个第一定位设备的测量结果,至少一个第一定位设备从第二定位设备获得第二定位设备的固定位置信息,至少一个第一定位设备根据至少一个第一定位设备的测量结果、第二定位设备的固定位置信息,获得至少一个第一定位设备的动态位置信息,至少一个第一定位设备根据至少一个第一定位设备的动态位置信息,获得移动实体的高精度定位结果。
[0143]
该实施方式中,针对第一定位设备和第二定位设备进行测量的定位方法进行了说明,可以参见一种地下建筑工程定位方法流程的实施,重复之处不再赘述。
[0144]
参见图3,本发明实施例提供的第三设备下发测量和调频的定位方法流程示意图,如图3所示,包括以下步骤:
[0145]
301:下发至少一个第一定位设备的调频指示消息;
[0146]
302:接收至少一个第一定位设备的工作频率消息;
[0147]
303:确定至少一个第一定位设备处于测量状态;
[0148]
304:下发至少一个第一定位设备的测量指示消息;
[0149]
305:接收至少一个第一定位设备的测量结果消息;
[0150]
306:获得至少一个第一定位设备的测量结果;
[0151]
307:获得第二定位设备的固定位置信息;
[0152]
308:根据至少一个第一定位设备的测量结果、第二定位设备的固定位置信息,获得至少一个第一定位设备的动态位置信息;
[0153]
309:下发至少一个第一定位设备的调频指示消息;
[0154]
310:接收至少一个第一定位设备的工作频率消息;
[0155]
311:确定至少一个第一定位设备处于节电状态;
[0156]
312:根据至少一个第一定位设备的动态位置信息,获得移动实体的高精度定位结果。
[0157]
在具体实施中,第三设备周期式或事件触发式地下发至少一个第一定位设备的调
频指示消息,第三设备接收至少一个第一定位设备的工作频率消息,第三设备根据至少一个第一定位设备的工作频率消息确定至少一个第一定位设备处于测量状态。在此基础上,第三设备周期式或事件触发式地下发至少一个第一定位设备的测量指示消息,第三设备接收至少一个第一定位设备的测量结果消息,第三设备通过中值滤波和/或标准差滤波获得至少一个第一定位设备的测量结果。第三设备通过管理平台的用户界面输入或者通过数据库获得第二定位设备的固定位置信息。第三设备根据至少一个第一定位设备的测量结果、第二定位设备的固定位置信息,获得至少一个第一定位设备的动态位置信息。在此基础上,第三设备周期式或事件触发式地下发至少一个第一定位设备的调频指示消息,第三设备接收至少一个第一定位设备的工作频率消息,第三设备通过至少一个第一定位设备的工作频率消息确定至少一个第一定位设备处于节电状态。第三设备根据至少一个第一定位设备的动态位置信息,获得移动实体的高精度定位结果。
[0158]
进一步的,当第三设备是多台服务器时,定位服务器可以承载定位引擎软件,应用服务器可以承载管理平台软件。应用服务器下发调频指示消息,定位服务器将调频指示消息转发给至少一个第一定位设备。定位服务器接收第一定位设备的工作频率消息并转发给应用服务器,应用服务器根据至少一个第一定位设备的工作频率消息确定至少一个第一定位设备处于测量状态。在此基础上,应用服务器下发测量指示消息,定位服务器接收第一定位设备的测量结果消息,定位服务器通过中值滤波和/或标准差滤波获得至少一个第一定位设备的测量结果并发送给应用服务器。应用服务器通过管理平台的用户界面输入或者通过数据库获得第二定位设备的固定位置信息,应用服务器根据至少一个第一定位设备的测量结果、第二定位设备的固定位置信息,获得至少一个第一定位设备的动态位置信息。在此基础上,应用服务器下发调频指示消息,定位服务器将调频指示消息转发给至少一个第一定位设备。定位服务器接收第一定位设备的工作频率消息并转发给应用服务器,应用服务器根据至少一个第一定位设备的工作频率消息确定至少一个第一定位设备处于节电状态。应用服务器通过消息告知或者通过数据库告知定位服务器至少一个第一定位设备的动态位置信息。定位服务器根据至少一个第一定位设备的动态位置信息,获得移动实体的高精度定位结果。
[0159]
该实施方式中,针对第三设备下发测量和调频的定位方法进行了说明,可以参见一种地下建筑工程定位方法流程的实施,重复之处不再赘述。
[0160]
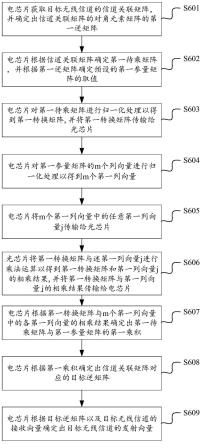
参见图4,本发明实施例提供的定位标签辅助定位基站进行定位的定位方法流程示意图,如图4所示,包括以下步骤:
[0161]
401:定位标签和定位基站进行测量;
[0162]
402:定位基站和测量基准定位设备进行测量;
[0163]
403:接收定位基站、定位标签的测量结果消息;
[0164]
404:获得定位基站、定位标签的测量结果;
[0165]
405:获得第二定位设备的固定位置信息;
[0166]
406:根据定位基站的测量结果、定位标签的测量结果、第二定位设备的固定位置信息,获得定位基站、定位标签的动态位置信息;
[0167]
407:移动实体和定位基站进行测量;
[0168]
408:接收移动实体和定位基站的测量结果消息;
[0169]
409:获得移动实体和定位标签的测量结果;
[0170]
410:根据定位基站、定位标签的动态位置信息,移动实体和定位基站、定位标签的测量结果,获得移动实体的高精度定位结果。
[0171]
在具体实施中,定位基站和定位标签部署在不同的作业设备上,定位基站和定位标签的位置信息不相同,定位基站是定位标签的测量基准定位设备,定位标签和定位基站进行测量,定位基站和对应的测量基准定位设备进行测量。第三设备接收定位基站、定位标签的测量结果消息,通过中值滤波和/或标准差滤波获得定位基站、定位标签的测量结果。第三设备通过管理平台的用户界面输入或者通过数据库获得第二定位设备的固定位置信息。第三设备根据定位基站的测量结果、定位标签的测量结果、第二定位设备的固定位置信息,获得定位基站、定位标签的动态位置信息。与移动实体绑定的定位标签和定位基站进行测量,第三设备接收移动实体和定位基站的测量结果,第三设备根据定位基站的动态位置信息、定位标签的动态位置信息、移动实体和定位基站的测量结果,可以推导获得移动实体和定位标签的测量结果,进而获得移动实体的高精度定位结果。
[0172]
在具体实施中,第三设备的定位方法流程可以由定位基站来执行。具体的,定位基站通过中值滤波和/或标准差滤波获得定位基站、定位标签的测量结果。定位基站通过消息获得第二定位设备的固定位置信息。定位基站根据定位基站的测量结果、定位标签的测量结果、第二定位设备的固定位置信息,获得定位基站、定位标签的动态位置信息。定位基站根据定位基站的动态位置信息、定位标签的动态位置信息、移动实体和定位基站的测量结果,可以推导获得移动实体和定位标签的测量结果,进而获得移动实体的高精度定位结果。
[0173]
在隧道、煤矿等地下建筑工程环境中,由于爆破作业不宜在邻近的作业设备上部署定位基站,可以部署定位标签辅助其他作业设备上的定位基站进行定位。
[0174]
该实施方式中,针对定位标签辅助定位基站进行定位的定位方法进行了说明,可以参见一种地下建筑工程定位方法流程的实施,重复之处不再赘述。
[0175]
参见图5,本发明实施例提供的隧道环境下定位方法示意图,如图5所示,包括至少一个第一定位设备、第二定位设备、移动实体,其中,附图中以3个定位基站(bs0、bs1、bs2)、3个定位标签(tag1、tag2、tag3)、1个移动实体(me1)进行举例说明。
[0176]
在具体实施中,bs0是部署在隧道完工区域正洞墙壁上的定位基站;bs1和tag1是部署在隧道作业区域二衬台车上的定位基站和定位标签,tag1和bs1的位置信息相同或者已知tag1和bs1的相对位置,tag1辅助bs1和bs0进行测量1;bs2和tag2是部署在隧道作业区域二衬台车上的定位基站和定位标签,tag2和bs2的位置信息相同或者已知tag2和bs2的相对位置,tag2辅助bs2和bs1进行测量2;tag3是部署在隧道作业区域掌子面台车上的定位标签,tag3和bs2进行测量3,tag3辅助bs2进行定位;移动实体me1在作业区域,me1和bs2进行测量4。
[0177]
通过测量1、测量2、测量3获得定位标签tag1、tag2、tag3的测量结果,获得定位基站bs0的固定位置信息,根据定位标签tag1、tag2、tag3的测量结果、bs0的固定位置信息,获得定位标签tag1、tag2、tag3的动态位置信息,从而获得定位基站bs1、bs2的动态位置信息。通过测量4获得移动实体me1和定位基站bs2的测量结果,可以推导获得移动实体me1和定位标签tag3的测量结果,根据bs2的动态位置信息、tag3的动态位置信息、me1和bs2的测量结果、me1和tag3的测量结果,获得me1的高精度定位结果。
[0178]
该实施方式中,针对隧道环境下定位方法进行了说明,可以参见一种地下建筑工程方法流程的实施,重复之处不再赘述。
[0179]
参见图6,本发明实施例提供的煤矿环境下定位方法示意图,如图6所示,包括至少一个第一定位设备、第二定位设备、移动实体,其中,附图中以3个定位基站(bs3、bs4、bs5)、1个定位标签(tag4)、1个移动实体(me2)进行举例说明。
[0180]
在具体实施中,bs3是部署在煤矿完工区域巷道墙壁上的定位基站;bs4是部署在煤矿作业区域矿车上的定位基站,bs4和bs3进行测量5;bs5是部署在煤矿作业区域矿车上的定位基站,bs5和bs4进行测量6;tag4是部署在煤矿作业区域掘进钻车上的定位标签,tag4和bs5进行测量7,tag4辅助bs5进行定位;移动实体me2在作业区域,me2和bs5进行测量8。
[0181]
通过测量5、测量6获得定位基站bs4、bs5的测量结果,通过测量7获得定位标签tag4的测量结果,获得定位基站bs3的固定位置信息,根据定位基站bs4、bs5的测量结果、定位标签tag4的测量结果、bs3的固定位置信息,获得定位基站bs4、bs5的动态位置信息、定位标签tag4的动态位置信息。通过测量8获得移动实体me2和定位基站bs5的测量结果,可以推导获得移动实体me2和定位标签tag4的测量结果,根据bs5的动态位置信息、tag4的动态位置信息、me2和bs5的测量结果、me2和tag4的测量结果,获得me2的高精度定位结果。
[0182]
该实施方式中,针对煤矿环境下定位方法进行了说明,可以参见一种地下建筑工程方法流程的实施,重复之处不再赘述。
[0183]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。