1.本发明涉及一种应用于空天信息系统,适用于全空域多目标测控通信设备,可增加系统吞吐量、降低星载设备复杂度、提高接入实时性的随机接入模式。
背景技术:
2.随着航天技术的快速发展,立方星等小型卫星得到快速发展与部署,以商业、侦察等用途为主的中小型航天器系统多采用星座部署式的系统架构,空间操控管理对象急剧增多。传统的地面主导计划接入模式将面临巨大压力,暴露出工作效率低、实时性不强、故障发现和应急抢救不及时等方面的问题,严重影响到网络的运行效率。在该应用场景下,需建立一种适应大航天时代的灵活接入模式,提升测控通信网络运行效率。
3.此外,随着新型智能用户平台的技术发展,卫星平台将会向在轨自主管理的方向发展(如0.3m分辨率光学成像卫星),催生出天地协同任务驱动模式。在该模式下,星上自主判断卫星运行是否正常,出现异常后卫星主动发起回传,实时向用户中心提供平台运行的综合态势信息,以减少地面人工判断和管理的工作量;除了星上自主健康管理,卫星亦可根据侦察、遥感等数据量承载情况,主动发起业务服务申请,将数据及时卸载并回传至用户中心;用户除了为自身数据传输任务需求直接提出数据传输使用申请,也可实现多个用户目标协同应用,即由某一个用户目标提出其他用户目标协同工作的使用需求,通过测控通信系统向相应协同工作用户目标发送任务计划,调用数传资源支持其业务数据的传输。但是,目前传统计划接入并不支持天地协同任务驱动模式。
4.借鉴地面移动通信思想,美国nasa空间通信与导航(space communications and navigations,scan)制定了2025年及以后的下一代近地通信与导航架构,提供距地球2m公里以内的通信与导航服务,即空间移动网络(space mobile network,smn)。smn利用地面移动无线网技术,将航天器通信从静态的、预先计划的通信方法向动态、任务驱动、面向服务的基于网络的通信方法转变,实现网络用户拥有类似于地球移动无线智能手机用户的服务体验。其中涉及到的用户发起服务(uis)是一种新型调度服务,允许任务航天器直接通过一种自动化资源分配系统发起资产分配请求;航天器不仅可以请求服务时间窗口,还可以请求定制带宽,从而提高网络和系统的效能;航天器通过信令通道和数据通道进行uis握手完成服务获取。
5.近几年我国也积极开展了航天测控通信系统随机接入技术研究。借鉴地面蜂窝移动通信思想,卫星与接入节点之间在业务信道的基础上,额外建立一种低码率、同时全空域覆盖的专用控制信道,实现航天器始终处于网络在线状态。通过专用控制信道,接入双方获取所需的各类信息(接入申请信息、基本状态信息等),自主配置完成接入,为减少计划驱动,提高测控数传任务的实时性提供有力保障。其中全空域多目标测控通信设备作为地基接入节点的唯一形态,其随机接入模式设计尤为重要,直接影响测控通信网络的运行效率及服务效能。因此,本发明基于现有的前返向全景固定波束接入模式,设计一种采用多波束分区扫描提升全空域测控通信随机接入性能的方法,实现航天器高效率接入空天信息系
统。
技术实现要素:
6.本发明的目的是针对大航天时代灵活接入、天地协同任务驱动、突发事件快速响应等需求,基于现有的前返向全景固定波束接入模式,提供一种采用多波束分区扫描,可增加全空域多目标测控通信系统吞吐量、降低星载设备复杂度、提高接入实时性的随机接入方法。
7.本发明的上述目的可以通过以下措施来达到,一种多波束分区扫描提升全空域测控通信随机接入性能的方法,具有如下技术特征:作为接入节点的全空域多目标测控通信系统,利用数字波束形成原理,分别形成增益低、覆盖广的全景固定波束或者增益高、波束宽度较窄的扫描波束;接入节点采用前向多波束扫描 返向全景固定波束接入模式,即接入节点通过激活n个阵元形成前向扫描波束,每个扫描波束按照扫描图案扫描各自区域,共利用多个前向扫描波束分区扫描实现全空域覆盖,同时接入节点通过激活m个阵元形成返向全景波束,每个全景固定波束可覆盖一定空域,利用多个返向全景固定波束实现同时全空域覆盖;首先接入节点多个前向波束实现同时分区扫描广播,然后卫星收到广播消息后,基于链路接入策略选择驻留小区,发起包含卫星id、接入申请等级等内容的接入申请;紧接着,接入节点基于返向全景波束进行多用户接入检测,接收卫星发起的接入申请消息,并通过前向扫描波束发送接入响应;卫星与接入节点之间通过前向扫描波束与返向全景波束完成双向认证;认证完毕后,接入节点分配专用控制信道,通过前向扫描波束发送至卫星,完成链路接入;链路连接建立后,接入节点基于返向全景波束接收卫星基本状态信息,完成卫星基本状态管理;在用户中心发起的业务接入阶段,接入节点基于业务服务策略,通过前向扫描波束发起寻呼申请,通过返向全景波束接收卫星发起的业务应答消息等;在卫星自主发起的业务接入阶段,接入节点通过返向全景波束接收卫星发起的业务申请消息,通过前向扫描波束分配业务信道资源等,完成业务接入。
8.本发明相比于现有的前返向全景固定波束接入模式具有以下有益效果:增加系统吞吐量。本发明采用前向多波束扫描 返向全景固定波束接入模式,前向扫描波束的波束宽度相比全景波束更窄,有效提升eirp值,在相同约束条件下(星上g/t值、作用距离、传输体制等),前向扫描波束可传输更高的信息速率。因此,本发明采用的前向多波束扫描 返向全景固定波束接入模式增加了系统吞吐量。
9.降低星载设备复杂度。本发明采用前向多波束扫描 返向全景固定波束接入模式,前向扫描波束相比前向全景波束,提升了接入节点eirp值,在给定约束条件下(信息传输速率、作用距离、传输体制等),前向扫描波束可有效提升星上接收载噪比,信号解调余量增加。因此,本发明采用的前向多波束扫描 返向全景固定波束接入模式降低了星载设备信号处理复杂度。
10.提高接入实时性。本发明采用前向多波束扫描 返向全景固定波束接入模式,接入节点前向发射有效全向辐射功率eirp为阵列辐射功率与阵列合成增益之和,若波束宽度变窄(以1/2波束宽度为例),会使得波位个数约变为之前的2倍,但发射eirp约提升6db(阵列合成增益增加3db,激活阵元数增加一倍带来发射功率增加3db),那么速率将提升4倍,即数据发送时间缩短为之前的1/4。可以看出,虽然波位个数变为之前2倍,但是数据发送时间缩
短为1/4,在不考虑数据传输时延及处理时延的情况下,接入时间约变为1/4*2=1/2。因此,本发明采用的前向多波束扫描 返向全景固定波束接入模式可有效提高接入实时性。
附图说明
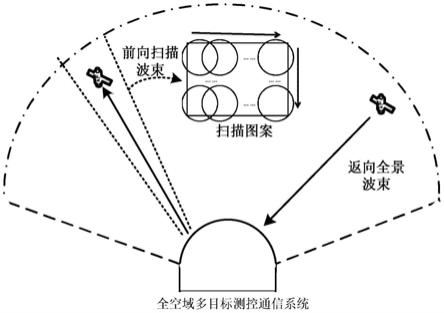
11.图1是接入节点前向多波束扫描 返向全景固定波束接入模式示意图。
12.图2是图1中接入节点返向全景固定波束示意图(黑色粗经线表示俯仰角5度)。
13.图3是图1中接入节点前向多波束分区扫描波位示意图。
14.图4是接入节点前向多波束扫描 返向全景固定波束模式下随机接入流程示意图。
15.下面结合附图和实施例对发明进一步说明。
具体实施方式
16.参阅图1。作为接入节点的全空域多目标测控通信系统,利用数字波束形成原理,分别形成增益低、覆盖广的全景固定波束或者增益高、波束宽度较窄的扫描波束;接入节点采用前向多波束扫描 返向全景固定波束接入模式,即接入节点通过激活n个阵元形成前向扫描波束,每个扫描波束按照扫描图案扫描各自区域,共利用多个前向扫描波束分区扫描实现全空域覆盖,同时接入节点通过激活m个阵元形成返向全景波束,每个全景固定波束可覆盖一定空域,利用多个返向全景固定波束实现同时全空域覆盖。
17.前向扫描波束用于承载广播消息、接入响应消息、寻呼消息、身份认证消息等,扫描波束的驻留方式分为固定驻留和弹性驻留两种,固定驻留方式为前向扫描波束驻留时间是定值,弹性驻留方式为前向扫描波束根据接入卫星数量动态调整驻留时间;返向全景固定波束用于承载接入申请消息、寻呼响应消息、业务申请消息等。
18.首先接入节点多个前向波束实现同时分区扫描广播,广播消息中包含小区id、时间、节点位置、业务资源状态等;然后卫星收到广播消息后,基于链路接入策略选择驻留小区,发起包含卫星id、接入申请等级等内容的接入申请;紧接着,接入节点基于返向全景波束进行多用户接入检测,接收卫星发起的接入申请消息,并通过前向扫描波束发送接入响应;卫星与接入节点之间通过前向扫描波束与返向全景波束完成双向认证;认证完毕后,接入节点分配专用控制信道,通过前向扫描波束发送至卫星,完成链路接入。
19.链路连接建立后,接入节点基于返向全景波束接收卫星基本状态信息,完成卫星基本状态管理;在用户中心发起的业务接入阶段,接入节点基于业务服务策略,通过前向扫描波束发起寻呼申请,通过返向全景波束接收卫星发起的业务应答消息等;在卫星自主发起的业务接入阶段,接入节点通过返向全景波束接收卫星发起的业务申请消息,通过前向扫描波束分配业务信道资源等,完成业务接入。
20.参阅图2。本发明以等效口径5m全空域多目标测控系统设计作为实施例,接入节点返向全景固定波束为10个,实现同时全空域覆盖,其中,接入节点天顶方向一个波束,通过20个激活阵元覆盖方位向0~360度、俯仰角60度以上区域覆盖,在低俯仰角处,设计波束数共9个,且各波束中心位于俯仰向32度,在方位向,相邻波束的指向间隔40度,各波束通过激活2个阵元,形成方位向和俯仰向的波束宽度分别为40度和80度。天顶方向波束满足偏角30度以内,波束增益7db的约束;在低俯仰角处的波束,同样满足方位向波束宽度40度、俯仰向波束宽度80度范围内的天线增益不小于7db设计约束。
21.参阅图3。本发明以等效口径5m全空域多目标测控系统设计作为实施例,前向扫描波束设计的具体考虑如下:波束宽度:≤18.7
°
;1)波束驻留时间:32ms;前向波束驻留采用“即发即走”的方式,每个波位的驻留时间为一次前向信令发送的时间,波位驻留时间内可保证一条前向信令的完整发送,返向信令的接收可由全景波束实时接收,不受驻留时间的约束。
22.2)波束个数:10个;3)本发明根据卫星的运动速度和驻留时间,在俯仰向和方位向均设计合理重叠区域,保证波束对卫星的有效覆盖。
23.在上述因素中,整个全空域范围划分为如图3所示的10个区域,其中区域1包含9个波位,区域2~10覆盖范围相等,各自包含14个波位;在各波束扫描的相邻波位设置适当的重叠,以保证对全空域范围内目标的有效覆盖,其中,重叠区域的大小等于单波位波束驻留时间内目标运动带来的俯仰角和方位角最大变化量;选取系统子阵内部的13个阵元形成控制波束,各区域分别用1个波束对各波位进行循环扫描,即接入节点利用10个控制波束按照预先设计的扫描图案完成周期性扫描,实现全空域有效覆盖。
24.参阅图4。前向多波束扫描 返向全景固定波束接入模式下,在计时开始时,波束可能出现未对准目标的情况,因此在第一条消息发送之前存在一个等待时间t
period
。接入节点与卫星交互3次消息即可实现链路接入,其中第一次交互包括前向发送广播信息、返向发送接入申请信息;第二次交互包括前向发送接入响应信息、返向发送用户认证信息;第三次交互包括前向发送接入节点认证信息、返向发送接入确认信息。
25.对于前向多波束扫描 返向全景固定波束接入模式的单目标随机接入时间t
access
满足下式:式中,t为波束驻留时间,t
wait
为广播消息等待时间,t
period
为重访周期,为前向消息发送时间,为前向信息接收处理时间,为返向消息发送时间,为返向信息接收处理时间,td为空间传输时间;n为扫描周期数,nt为各小区扫描周期,n为各小区波束数。
26.以上所述的仅是本发明的优选实施实例。应当指出,对于本领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干变形和改进,比如通过实际结构的调整变化,也可推广到其他系统领域的应用平台,这些变更和改变都应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。