一种otfs通信感知一体化信号目标参数估计方法
技术领域
1.本发明属于无线通信和雷达信号处理技术领域,具体涉及一种基于mmse准则与dd域能量质心谱校正的otfs通信感知一体化信号目标参数估计方法。
背景技术:
2.现有的无线通信系统提供通信服务以解决用户的话音及数据业务需求。未来第六代移动通信系统(6g)除了实现传统通信网络的功能,还将为新兴业务如扩展现实、智能车联网提供高精度传感服务,因而无线通信与雷达感知技术的融合受到了广泛的关注。长期以来无线通信和雷达感知并行发展、交叉有限,然而随着两者技术的演进,通信系统与感知系统逐渐具备联合设计的可能与潜力。在系统组成结构上,通信与感知在信号处理算法、设备甚至系统架构上有许多共同点;在工作频段兼容方面,通信系统频段的抬高将导致两者的频段出现越来越多的交叠,两者共享频谱将具有潜在可能;此外将通信系统与感知系统集成于一体能够减小设备尺寸与成本。因此为了解决新兴业务的通感双功能需求并提高无线电频谱效率及降低硬件成本,需要联合设计通信系统与感知系统从而共享相同的频段和硬件设备,最终实现通信感知一体化。通信与感知的深度融合依赖于通信感知一体化信号处理,对通感一体化信号波形进行优化与融合设计,使得一种波形能同时满足通信传输和雷达感知的需求,这是实现目标感知和数据通信两种功能集成的关键挑战。
3.目前,一种新型二维调制技术即正交时频空(orthogonal time frequency space,otfs),其在时延-多普勒(delay-doppler,dd)域调制符号信息能同时获得时间域和频率域全分集增益,因而对多普勒频移并不敏感,即使在高移动性场景下仍能实现良好的通信性能。雷达感知的目标参数是距离和速度的元组形式,分别对应于时延和多普勒信息,这与otfs在dd域进行信号调制和信道表示的思路相契合,目前,现有技术的解决思路是基于发送调制符号与接收调制符号估计雷达感知信道完成对目标距离和速度的参数估计。但目前现有技术在感知性能方面还有待提升,如峰值旁瓣比和雷达图像信噪比,此外当目标的实际距离和速度为分数倍的感知分辨率时,如何降低感知参数估计误差并获得更加精确的估计结果也成为一个急待解决的技术问题。
技术实现要素:
4.针对现有技术存在的问题,本发明提供了一种基于mmse准则与dd域能量质心谱校正的otfs通信感知一体化信号目标参数估计方法,本发明所述方法包括以下步骤:
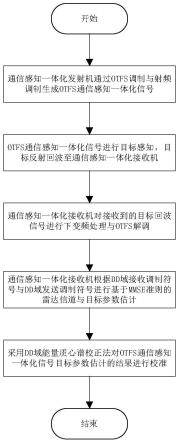
5.步骤1,通信感知一体化发射机对通信信息序列进行星座映射、otfs调制与射频调制,生成由发射天线发送的otfs通信感知一体化信号:
6.步骤1.1,通信信源生成由二进制比特构成的数据信息序列,将信息序列输入至星座映射器并采用正交振幅调制(quadrature amplitude modulation,qam)进行数字调制获得发送调制符号向量;
7.表示长度为mn的发送调制符号向量,m表示otfs帧的子载波数量,n表示
otfs帧的符号数量;
8.步骤1.2,将待传输的发送调制符号向量排列成n行m列的符号矩阵并摆放于二维时延-多普勒(delay-doppler,dd)域平面栅格γ获得dd域发送调制符号矩阵
9.dd域平面栅格定义为γ如以下公式(1)所示:
[0010][0011]
以上公式(1)中,k和l分别表示多普勒域的索引和时延域的索引,t和δf分别表示otfs符号周期和子载波间隔,并满足tδf=1以保持正交性,(k)n表示对k取多普勒频移运算,如以下公式(2)所示:
[0012][0013]
步骤1.3,对dd域发送调制符号进行0tfs调制,获得时域上的基带发射信号:
[0014]
步骤1.3.1,通过辛有限傅里叶逆变换(inverse symplectic finite fourier transform,isfft)将dd域发送调制符号矩阵映射为时间-频率(time-frequency,tf)域发送调制符号矩阵占据tf域平面栅格λ上的n个符号和m个子载波对应的时频格点,映射过程如以下公式(3)所示:
[0015][0016]
其中,isfft(
·
)表示应用辛有限傅里叶逆变换,{x
tf
[n,m]∈x
tf
,n=0,
…
,n-1,m=0,
…
,m-1}表示tf域平面栅格λ上的第n个时间和第m个频率格点处的发送调制符号,dd域平面栅格γ上的第k个多普勒和第l个时延格点处的发送调制符号表示为{x
dd
[k,l]∈x
dd
,k=0,
…
,n-1,l=0,
…
,m-1};
[0017]
tf域平面栅格定义为λ,如以下公式(4)所示:
[0018]
λ={(nt,mδf),n=0,1,...,n-1,m=0,1,...,m-1}......(4),
[0019]
其中,n和m分别为时间域的索引和频率域的索引;
[0020]
步骤1.3.2,对tf域发送调制符号矩阵进行海森堡变换(heisenberg transform),通过矩形脉冲成形滤波器获得时域基带发射信号,变换公式如以下公式(5)所示:
[0021][0022]
其中,s(t)表示时域基带发射信号,g
tx
(t)为发送端持续时间为t的矩形脉冲成形滤波器,当0≤t≤t时有g
tx
(t)=1,否则g
tx
(t)=0;
[0023]
步骤1.4,对时域上的基带发射信号进行射频调制,产生的由发射天线发送的otfs通信感知一体化信号如以下公式(6)所示:
[0024][0025]
其中,s
rf
(t)表示由发射天线发送的otfs通信感知一体化信号,fc表示射频载波频率;
[0026]
步骤2,通信感知一体化发射机发送otfs通信感知一体信号进行目标感知,在一体化信号感知到目标后,由目标反射回波信号至通信感知一体化接收机:
[0027]
步骤2.1,根据所感知目标的特征建立dd域雷达信道脉冲响应的模型;
[0028]
dd域雷达信道脉冲响应的模型如以下公式(7)所示:
[0029][0030]
其中,h(τ,v)表示dd域雷达信道,τ和v分别表示时延和多普勒频移,p表示感知目标的数量,h
p
表示第p个目标的复信道增益,p=1,
…
,p,τ
p
和v
p
分别表示通信感知一体化发射机与第p个目标的往返时延和多普勒频移,τ
p
满足τ
p
=2r
p
/c,v
p
满足v
p
=2f
cvp
/c,r
p
和v
p
分别表示通信感知一体化发射机与第p个目标的相对距离和相对运动速度,c代表光速,δ(
·
)为狄利克雷函数;
[0031]
步骤2.2,将发送的otfs通信感知一体化信号经感知目标反射后,产生回波并返回至通信感知一体化接收机的这一过程,等效于发送的0tfs通信感知一体化信号经过步骤2.1所述dd域雷达信道的射频等效信道到达通信感知一体化接收机处,通信感知一体化接收机处收到回波信号的等效过程如以下公式(8)所示:
[0032]rrf
(t)=∫∫h
rf
(τ,v)s
rf
(t-τ)e
j2πv(t-τ)
dτdv......(8),
[0033]
其中,r
rf
(t)表示通信感知一体化接收机处收到的回波信号,h
rf
(τ,v)表示步骤2.1所述的dd域雷达信道的射频等效信道;其中,dd域雷达信道的射频等效信道如以下公式(9)所示:
[0034][0035]
步骤3,通信感知一体化接收机在接收到由目标反射的回波信号后,进行下变频处理与otfs解调,获得dd域接收调制符号矩阵:
[0036]
步骤3.1,通信感知一体化接收机对回波信号进行下变频处理,获取时域基带接收信号;
[0037]
时域基带接收信号如以下公式(10)所示:
[0038][0039]
其中,r(t)表示通信感知一体化接收机处的时域基带接收信号;
[0040]
步骤3.2,对时域基带接收信号进行otfs解调,获得dd域接收调制符号矩阵
[0041]
步骤3.2.1,对时域基带接收信号应用魏格纳变换(wigner transform),得到tf域接收调制符号矩阵变换公式如以下公式(11)所示:
[0042][0043]
其中,{y
tf
[n,m]∈y
tf
,n=0,
…
,n-1,m=0,
…
,m-1}表示tf域平面栅格λ上的第n个时间和第m个频率格点处的接收调制符号,g
rx
(t)为接收端的矩形脉冲成形滤波器,(
·
)
*
表示求复共轭函数;
[0044]
步骤3.2.2,采用辛有限傅里叶变换(symplectic finite fourier transform,sfft)将tf域接收调制符号矩阵反映射,得到dd域接收调制符号矩阵映射过程如以下公式(12)所示:
[0045][0046]
其中,sfft(
·
)表示应用辛有限傅里叶变换,{y
dd
[k,l]∈y
dd
,k=0,
…
,n-1,l=0,
…
,m-1}表示dd域平面栅格γ上的第k个多普勒和第l个时延格点处的接收调制符号;
[0047]
步骤4,通信感知一体化接收机根据dd域接收调制符号与dd域发送调制符号进行雷达感知信号处理,完成雷达信道与目标参数估计:
[0048]
步骤4.1,将步骤2.1中所述的dd域雷达信道使用离散形式表达,如以下公式(13)所示:
[0049][0050]
其中,h[k,l]表示dd域雷达信道离散响应,即多普勒域索引k和时延域索引l处的复信道增益值,多普勒域索引k和时延域索引l分别对应于多普勒频移v=(k)n/(nt)和时延τ=l/(mδf),1/(nt)和1/(mδf)分别表示多普勒分辨率和时延分辨率;
[0051]
其中,第p个目标的往返时延τ
p
与时延分辨率的关系为τ
p
=l
p
/(mδf),多普勒频移ν
p
与多普勒分辨率的关系为v
p
=k
p
/(nt)且关系表示第p个目标位于dd域平面栅格γ上第l
p
个时延域索引和第k
p
个多普勒域索引处,当k=k
p
且l=l
p
时则h[k,l]=h
p
,当在第l个时延域索引和第k个多普勒域索引处未感知到目标时则h[k,l]=0;
[0052]
步骤4.2,根据步骤4.1所述的离散形式dd域雷达信道,获得dd域发送调制符号与dd域接收调制符号之间的输入输出关系,dd域发送调制符号与dd域接收调制符号之间的输入输出关系如以下公式(14)所示:
[0053][0054]
其中,《
·
》n和《
·
》m分别表示模n和模m运算,ω[k,l]表示dd域平面栅格γ上的第k个多普勒和第l个时延格点处的加性高斯白噪声,服从均值为零且方差(即平均功率)为σ2的复高斯分布,α[k,l]表示由时域样本的循环移位引起的多普勒域线性相移,α[k,l]如以下公式(15)所示:
[0055][0056]
步骤4.3,根据dd域接收调制符号和dd域发送调制符号进行基于最小均方误差准则(minimum mean square error,mmse)的dd域雷达信道与目标参数估计;
[0057]
步骤4.3.1,将步骤4.2所述的输入输出关系使用矩阵形式表达式如以下公式(16)所示:
[0058][0059]
其中,表示dd域接收调制符号向量,y
dd
的第k nl个元素为y
dd
[k,l],且0≤k nl≤mn-1,表示dd域雷达信道向量,h
dd
的第k nl个元素为h[k,l],表示dd域噪声向量,w
dd
的第k nl个元素为w[k,l],符号矩阵
的第i行第j列元素如以下公式(17)所示:
[0060][0061]
其中,i和j分别满足0≤i=k nl≤mn-1,o≤j=k
′
nl
′
≤mn-1;
[0062]
步骤4.3.2,根据步骤4.3.1.所述的矩阵形式输入输出关系,基于mmse准则进行dd域雷达信道估计,dd域雷达信道向量估计值如以下公式(18)所示:
[0063][0064]
其中,表示基于mmse准则估计的dd域雷达信道向量,(
·
)-1
表示矩阵求逆,(
·
)h表示复共轭转置,ps和σ2分别表示发送的otfs通信感知一体化信号的平均功率和噪声的平均功率,i
mn
表示维度为mn
×
mn的单位矩阵;
[0065]
步骤4.3.3,根据步骤4.3.2中基于mmse准则估计的dd域雷达信道向量获取感知目标在dd域平面栅格γ上的时延域索引和多普勒索引的估计结果;
[0066]
其中,表示估计的dd域雷达信道离散响应,即多普勒域索引k和时延域索引l处的复信道增益估计值,等于dd域雷达信道向量估计值的第k nl个元素,估计的dd域雷达信道离散响应其峰值对应的多普勒域索引和时延域索引分别为感知目标在dd域平面栅格γ上的多普勒域索引和时延域索引的估计结果,分别表示为和
[0067]
步骤4.3.4,由感知目标在dd域平面栅格γ上的多普勒域索引和时延域索引的估计结果进行目标参数估计,估计结果如以下公式(19)、公式(20)所示:
[0068][0069][0070]
以上公式(19)、公式(20)中,和分别表示通信感知一体化发射机与第p个目标的相对距离和相对运动速度的参数估计结果,和分别表示通信感知一体化发射机与第p个目标的往返时延和多普勒频移的参数估计结果,满足满足满足满足和分别表示第p个目标在dd域平面栅格γ上的时延域索引和多普勒域索引的估计结果;
[0071]
步骤5,在dd域平面栅格γ上采用dd域能量质心谱校正法对步骤4中otfs通信感知一体化信号目标参数估计的结果进行校准:
[0072]
步骤5.1,对步骤4.3.3中估计的dd域雷达信道离散响应进行样值比选,分别实施行比选和列比选,根据比选结果求向量元素中的最大值,即dd域雷达信道离散响应的峰值;
[0073]
行比选表示按行比较选取每一行的最大值,行比选的结果为向量满足足表示dd域雷达信道离散响应中第k行的最大值,k为多普勒域索引,列比选表示按列比较选取每一列的最大值,列比选的结果为向量满足满足表示dd域雷达信道离散响应中第l列的最大值,l为时延域索引,峰值对应于时延域索引和多普勒域索引
[0074]
步骤5.2,以dd域雷达信道离散响应的峰值为中心,向上取x个样值、向下取个x样值,同时向左取y个样值、向右取y个样值,并取样值的时延域索引与多普勒域索引;
[0075]
向上取x个样值的结果为下取x个样值的结果为左取y个样值的结果为右取y个样值的结果为
[0076]
步骤5.3,根据dd域样值的总能量与样值在时延域维度、多普勒域维度的加权能量,计算时延域维度的质心,并行计算多普勒域维度的质心;
[0077]
步骤5.3.1,计算步骤5.2中dd域样值的总能量,并行计算样值在时延域维度的加权能量及多普勒域维度的加权能量,计算公式如以下公式(21)至公式(23)所示:
[0078][0079][0080]
以上公式(21)至公式(23)中,e表示dd域样值的总能量,e
l
表示时延域维度的加权能量,ek表示多普勒域维度的加权能量,表示多普勒域索引k和时延域索引l处的能量,
[0081]
集合表示由步骤5.2中峰值与旁瓣值对应的时延域索引、多普勒域索引构成的集合,即
[0082]
步骤5.3.2,计算时延域维度的质心,并行计算多普勒域维度的质心,计算公式如以下公式(24)、公式(25)所示:
[0083][0084][0085]
其中,表示时延域维度的质心,表示多普勒域维度的质心;
[0086]
步骤5.4,根据步骤5.3得到的时延域维度的质心与多普勒域维度的质心,对目标
参数估计结果进行校准;
[0087]
校准结果如以下公式(26)、公式(27)所示(26)、(27):
[0088][0089][0090]
其中,和分别表示通信感知一体化发射机与第p个目标的相对距离和相对运动速度在经过dd域能量质心谱校正法校准后得到的参数估计结果,和分别表示经过dd域能量质心谱校正法校准后得到的时延域维度的质心和多普勒域维度的质心。
[0091]
本发明具有的显著的有益效果在于:
[0092]
1.本发明所述方法使用基于otfs调制的通信感知一体化信号完成了目标感知与参数估计功能且实现了对目标距离和速度的参数估计,本发明所述方法能够与现有的otfs通信系统相兼容并在支持高速移动通信的同时也能解决目标感知的需求,从而实现了通信感知一体化双功能。
[0093]
2.本发明所述方法提出了针对otfs通信感知一体化信号的基于mmse准则的感知处理算法,当目标的距离和速度分别为距离分辨率和速度分辨率的整数倍时能够准确估计目标参数信息且提出的dd域能量质心谱校正法能够将分数倍情况下产生的参数估计误差大大降低,通过校准获得更准确的参数估计结果并且极大地简化了计算过程,即大大降低了计算的复杂度。
附图说明
[0094]
图1是本发明所述方法基于mmse准则与dd域能量质心谱校正的otfs通信感知一体化信号目标参数估计方法的整体框图;
[0095]
图2是本发明所述方法步骤5中dd域能量质心谱校正法的原理示意图;
[0096]
图3是本发明所述方法实施例中归一化距离像性能曲线的仿真示意图;
[0097]
图4是本发明所述方法实施例中归一化速度像性能曲线的仿真示意图;
[0098]
图5是本发明所述方法的流程图。
具体实施方式
[0099]
下面结合说明书附图,进一步详细描述本发明的具体实施方式。如图1、图2所示,
[0100]
本发明所述方法包括以下步骤:
[0101]
步骤1,通信感知一体化发射机对通信信息序列进行星座映射、otfs调制与射频调制,生成由发射天线发送的otfs通信感知一体化信号:
[0102]
步骤1.1,通信信源生成由二进制比特构成的数据信息序列,将信息序列输入至星座映射器并采用正交振幅调制(quadrature amplirude modulation,qam)进行数字调制获得发送调制符号向量;
[0103]
表示长度为mn的发送调制符号向量,m表示otfs帧的子载波数量,n表示otfs帧的符号数量;
[0104]
步骤1.2,将待传输的发送调制符号向量排列成n行m列的符号矩阵并摆放于二维时延一多普勒(delay-doppler,dd)域平面栅格γ获得dd域发送调制符号矩阵
[0105]
dd域平面栅格定义为γ如以下公式(1)所示:
[0106][0107]
以上公式(1)中,k和l分别表示多普勒域的索引和时延域的索引,t和δf分别表示otfs符号周期和子载波间隔,并满足tδf=1以保持正交性,(k)n表示对k取多普勒频移运算,如以下公式(2)所示:
[0108][0109]
步骤1.3,对dd域发送调制符号进行otfs调制,获得时域上的基带发射信号:
[0110]
步骤1.3.1,通过辛有限傅里叶逆变换(inverse symplectic finite fourier transform,isfft)将dd域发送调制符号矩阵映射为时间-频率(time-frequency,tf)域发送调制符号矩阵占据tf域平面栅格λ上的n个符号和m个子载波对应的时频格点,映射过程如以下公式(3)所示:
[0111][0112]
其中,isfft(
·
)表示应用辛有限傅里叶逆变换,{x
tf
[n,m]∈x
tf
,n=0,
…
,n-1,m=0,
…
,m-1}表示tf域平面栅格λ上的第n个时间和第m个频率格点处的发送调制符号,dd域平面栅格γ上的第k个多普勒和第l个时延格点处的发送调制符号表示为{x
dd
[k,l]∈x
dd
,k=0,
…
,n-1,l=0,
…
,m-1};
[0113]
tf域平面栅格定义为λ,如以下公式(4)所示:
[0114]
λ={(nt,mδf),n=0,1,...,n-1,m=0,1,...,m-1}......(4),
[0115]
其中,n和m分别为时间域的索引和频率域的索引;
[0116]
步骤1.3.2,对tf域发送调制符号矩阵进行海森堡变换(heisenberg transform),通过矩形脉冲成形滤波器获得时域基带发射信号,变换公式如以下公式(5)所示:
[0117][0118]
其中,s(t)表示时域基带发射信号,g
tx
(t)为发送端持续时间为t的矩形脉冲成形滤波器,当0≤t≤t时有g
tx
(t)=1,否则g
tx
(t)=0;
[0119]
步骤1.4,对时域上的基带发射信号进行射频调制,产生的由发射天线发送的otfs通信感知一体化信号如以下公式(6)所示:
[0120][0121]
其中,s
rf
(t)表示由发射天线发送的0tfs通信感知一体化信号,fc表示射频载波频率;
[0122]
步骤2,通信感知一体化发射机发送0tfs通信感知一体信号进行目标感知,在一体化信号感知到目标后,由目标反射回波信号至通信感知一体化接收机:
[0123]
步骤2.1,根据所感知目标的特征建立dd域雷达信道脉冲响应的模型;
[0124]
dd域雷达信道脉冲响应的模型如以下公式(7)所示:
[0125][0126]
其中,h(τ,v)表示dd域雷达信道,τ和v分别表示时延和多普勒频移,p表示感知目标的数量,h
p
表示第p个目标的复信道增益,p=1,
…
,p,τ
p
和v
p
分别表示通信感知一体化发射机与第p个目标的往返时延和多普勒频移,τ
p
满足τ
p
=2r
p
/c,v
p
满足v
p
=2f
cvp
/c,r
p
和v
p
分别表示通信感知一体化发射机与第p个目标的相对距离和相对运动速度,c代表光速,δ(
·
)为狄利克雷函数;
[0127]
步骤2.2,将发送的otfs通信感知一体化信号经感知目标反射后,产生回波并返回至通信感知一体化接收机的这一过程,等效于发送的0tfs通信感知一体化信号经过步骤2.1所述dd域雷达信道的射频等效信道到达通信感知一体化接收机处,通信感知一体化接收机处收到回波信号的等效过程如以下公式(8)所示:
[0128]rrf
(t)=∫∫h
rf
(τ,v)s
rf
(t-τ)e
j2πv(t-τ)
dτdv......(8),
[0129]
其中,r
rf
(t)表示通信感知一体化接收机处收到的回波信号,h
rf
(τ,v)表示步骤2.1所述的dd域雷达信道的射频等效信道;其中,dd域雷达信道的射频等效信道如以下公式(9)所示:
[0130][0131]
步骤3,通信感知一体化接收机在接收到由目标反射的回波信号后,进行下变频处理与otfs解调,获得dd域接收调制符号矩阵:
[0132]
步骤3.1,通信感知一体化接收机对回波信号进行下变频处理,获取时域基带接收信号;时域基带接收信号如以下公式(10)所示:
[0133][0134]
其中,r(t)表示通信感知一体化接收机处的时域基带接收信号;
[0135]
步骤3.2,对时域基带接收信号进行otfs解调,获得dd域接收调制符号矩阵
[0136]
步骤3.2.1,对时域基带接收信号应用魏格纳变换(wigner transform),得到tf域接收调制符号矩阵变换公式如以下公式(11)所示:
[0137][0138]
其中,{y
tf
[n,m]∈y
tf
,n=0,
…
,n-1,m=0,
…
,m-1}表示tf域平面栅格λ上的第n个时间和第m个频率格点处的接收调制符号,g
rx
(t)为接收端的矩形脉冲成形滤波器,(
·
)
*
表示求复共轭函数;
[0139]
步骤3.2.2,采用辛有限傅里叶变换(symplectic finite fourier transform,sfft)将tf域接收调制符号矩阵反映射,得到dd域接收调制符号矩阵映射过程如以下公式(12)所示:
[0140]
[0141]
其中,sfft(
·
)表示应用辛有限傅里叶变换,{y
dd
[k,l]∈y
dd
,k=0,
…
,n-1,l=0,
…
,m-1}表示dd域平面栅格γ上的第k个多普勒和第l个时延格点处的接收调制符号;
[0142]
步骤4,通信感知一体化接收机根据dd域接收调制符号与dd域发送调制符号进行雷达感知信号处理,完成雷达信道与目标参数估计:
[0143]
步骤4.1,将步骤2.1中所述的dd域雷达信道使用离散形式表达,如以下公式(13)所示:
[0144][0145]
其中,h[k,l]表示dd域雷达信道离散响应,即多普勒域索引k和时延域索引l处的复信道增益值,多普勒域索引k和时延域索引l分别对应于多普勒频移v=(k)n/(nt)和时延τ=l/(mδf),1/(nt)和1/(mδf)分别表示多普勒分辨率和时延分辨率;
[0146]
其中,第p个目标的往返时延τ
p
与时延分辨率的关系为τ
p
=l
p
/(mδf),多普勒频移ν
p
与多普勒分辨率的关系为v
p
=k
p
/(nt)且关系表示第p个目标位于dd域平面栅格γ上第l
p
个时延域索引和第k
p
个多普勒域索引处,当k=k
p
且l=l
p
时则h[k,l]=h
p
,当在第l个时延域索引和第k个多普勒域索引处未感知到目标时则h[k,l]=0;
[0147]
步骤4.2,根据步骤4.1所述的离散形式dd域雷达信道,获得dd域发送调制符号与dd域接收调制符号之间的输入输出关系,dd域发送调制符号与dd域接收调制符号之间的输入输出关系如以下公式(14)所示:
[0148][0149]
其中,《
·
》n和《
·
》m分别表示模n和模m运算,ω[k,l]表示dd域平面栅格γ上的第k个多普勒和第l个时延格点处的加性高斯白噪声,服从均值为零且方差(即平均功率)为σ2的复高斯分布,α[k,l]表示由时域样本的循环移位引起的多普勒域线性相移,α[k,l]如以下公式(15)所示:
[0150][0151]
步骤4.3,根据dd域接收调制符号和dd域发送调制符号进行基于最小均方误差准则(minimum mean square error,mmse)的dd域雷达信道与目标参数估计;
[0152]
步骤4.3.1,将步骤4.2所述的输入输出关系使用矩阵形式表达式如以下公式(16)所示:
[0153][0154]
其中,表示dd域接收调制符号向量,y
dd
的第k nl个元素为y
dd
[k,l],且0≤k nl≤mn-1,表示dd域雷达信道向量,h
dd
的第k nl个元素为h[k,l],表示dd域噪声向量,w
dd
的第k nl个元素为w[k,l],符号矩阵的第i行第j列元素如以下公式(17)所示:
[0155][0156]
其中,i和j分别满足0≤i=k nl≤mn-1,0≤j=k
′
nl
′
≤mn-1;
[0157]
步骤4.3.2,根据步骤4.3.1.所述的矩阵形式输入输出关系,基于mmse准则进行dd域雷达信道估计,dd域雷达信道向量估计值如以下公式(18)所示:
[0158][0159]
其中,表示基于mmse准则估计的dd域雷达信道向量,(
·
)-1
表示矩阵求逆,(
·
)h表示复共轭转置,ps和σ2分别表示发送的otfs通信感知一体化信号的平均功率和噪声的平均功率,i
mn
表示维度为mn
×
mn的单位矩阵;
[0160]
步骤4.3.3,根据步骤4.3.2中基于mmse准则估计的dd域雷达信道向量获取感知目标在dd域平面栅格γ上的时延域索引和多普勒索引的估计结果;
[0161]
其中,表示估计的dd域雷达信道离散响应,即多普勒域索引k和时延域索引l处的复信道增益估计值,等于dd域雷达信道向量估计值的第k nl个元素,估计的dd域雷达信道离散响应其峰值对应的多普勒域索引和时延域索引分别为感知目标在dd域平面栅格γ上的多普勒域索引和时延域索引的估计结果,分别表示为和
[0162]
步骤4.3.4,由感知目标在dd域平面栅格γ上的多普勒域索引和时延域索引的估计结果进行目标参数估计,估计结果如以下公式(19)、公式(20)所示:
[0163][0164][0165]
以上公式(19)、公式(20)中,和分别表示通信感知一体化发射机与第p个目标的相对距离和相对运动速度的参数估计结果,和分别表示通信感知一体化发射机与第p个目标的往返时延和多普勒频移的参数估计结果,满足满足满足满足和分别表示第p个目标在dd域平面栅格γ上的时延域索引和多普勒域索引的估计结果;
[0166]
步骤5,在dd域平面栅格γ上采用dd域能量质心谱校正法对步骤4中otfs通信感知一体化信号目标参数估计的结果进行校准:
[0167]
步骤5.1,对步骤4.3.3中估计的dd域雷达信道离散响应进行样值比选,分别实施行比选和列比选,根据比选结果求向量元素中的最大值,即dd域雷达信道离散响应的峰值;
[0168]
行比选表示按行比较选取每一行的最大值,行比选的结果为向量满
足足表示dd域雷达信道离散响应中第k行的最大值,k为多普勒域索引,列比选表示按列比较选取每一列的最大值,列比选的结果为向量满足满足表示dd域雷达信道离散响应中第l列的最大值,l为时延域索引,峰值对应于时延域索引和多普勒域索引
[0169]
步骤5.2,以dd域雷达信道离散响应的峰值为中心,向上取x个样值、向下取个x样值,同时向左取y个样值、向右取y个样值,并取样值的时延域索引与多普勒域索引;
[0170]
向上取x个样值的结果为下取x个样值的结果为左取y个样值的结果为右取y个样值的结果为
[0171]
步骤5.3,根据dd域样值的总能量与样值在时延域维度、多普勒域维度的加权能量,计算时延域维度的质心,并行计算多普勒域维度的质心;
[0172]
步骤5.3.1,计算步骤5.2中dd域样值的总能量,并行计算样值在时延域维度的加权能量及多普勒域维度的加权能量,计算公式如以下公式(21)至公式(23)所示:
[0173][0174][0175]
以上公式(21)至公式(23)中,e表示dd域样值的总能量,e
l
表示时延域维度的加权能量,ek表示多普勒域维度的加权能量,表示多普勒域索引k和时延域索引l处的能量,
[0176]
集合表示由步骤5.2中峰值与旁瓣值对应的时延域索引、多普勒域索引构成的集合,即
[0177]
步骤5.3.2,计算时延域维度的质心,并行计算多普勒域维度的质心,计算公式如以下公式(24)、公式(25)所示:
[0178][0179][0180]
其中,表示时延域维度的质心,表示多普勒域维度的质心;
[0181]
步骤5.4,根据步骤5.3得到的时延域维度的质心与多普勒域维度的质心,对目标参数估计结果进行校准;
[0182]
校准结果如以下公式(26)、公式(27)所示(26)、(27):
[0183][0184][0185]
其中,和分别表示通信感知一体化发射机与第p个目标的相对距离和相对运动速度在经过dd域能量质心谱校正法校准后得到的参数估计结果,和分别表示经过dd域能量质心谱校正法校准后得到的时延域维度的质心和多普勒域维度的质心。
[0186]
为了验证本实施例中本发明所述方法的技术效果,采用计算机仿真的方式,从归一化距离像和归一化速度像的角度来评估本实施例所述方法的性能。在仿真中,雷达信道模型中的目标个数为1,即单目标,感知目标的实际距离为455m,实际速度为86m/s;射频载波频率为28ghz;带宽为5mhz;otfs子载波数量和符号数量分别为128和64;子载波间隔为39khz;数字调制方式采用4进制的正交幅度调制(4qam);距离分辨率为30m,速度分辨率为3.27m/s。图3中归一化感知目标距离像的仿真结果显示,当otfs通信感知一体化信号在采用mmse准则进行目标参数估计时,未使用dd域能量质心谱校正方法校准前目标距离参数估计的结果为450m,而目标实际距离为455m,在dd域能量质心谱校正方法的作用下距离参数估计的结果被校准为454.09m。因此当目标实际距离为距离分辨率的分数倍时,即目标实际距离455m是距离分辨率30m的分数倍,本发明所述方法会将其距离感知为最近的整数时延域索引对应的距离即450m,由此带来距离感知误差;在此基础上,dd域能量质心谱校正法能够对距离参数估计的结果进行进一步地校准,在距离分辨率有限且固定时能够有效降低距离参数估计误差,提升感知精度。从图4能够看出,仿真得到的归一化感知目标速度像显示在未校准前目标速度参数估计的结果为85.01m/s,其对应整数多普勒域索引,而目标实际速度为86m/s,是速度分辨率的分数倍,dd域能量质心谱校正法将速度参数估计的结果校准为85.76m/s。因此,本发明所述方法提出的otfs通信感知一体化信号目标参数估计及dd域能量质心谱校正法方案能够有效地解决目标参数估计的技术问题且dd域能量质心谱校正法能够大大降低目标感知时的参数估计误差。
[0187]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的范围内,能够轻易想到的变化或替换,都应涵盖在本发明权利要求的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
