技术特征:
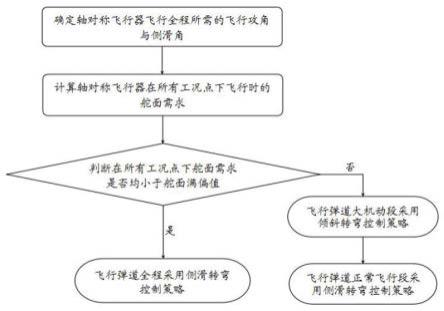
1.一种轴对称飞行器大机动控制方法,其特征在于,包括:步骤1,根据轴对称飞行器的技术指标确定所述轴对称飞行器飞行全程所需的飞行攻角、侧滑角与马赫数;步骤2,根据所述飞行攻角需求、所述侧滑角需求与所述马赫数需求,计算所述轴对称飞行器在所有工况点下飞行时的舵面需求;步骤3,获取舵面满偏值,判断在所有工况点下所述舵面需求与所述舵面满偏值的大小;当在所有工况点下所述舵面需求均小于所述舵面满偏值时,所述轴对称飞行器的飞行弹道全程采用侧滑转弯控制策略;当在所有工况点中的一工况点下所述舵面需求大于或等于所述舵面满偏值时,所述轴对称飞行器根据所述舵面需求与所述舵面满偏值的大小将所述飞行弹道分为大机动段和正常飞行段,在所述大机动段采用倾斜转弯控制策略,在所述正常飞行段采用侧滑转弯控制策略。2.根据权利要求1所述的轴对称飞行器大机动控制方法,其特征在于,所述步骤1包括:建立纵向平面内的轴对称飞行器运动模型;通过对所述轴对称飞行器运动模型进行仿真,得到所述轴对称飞行器技术指标要求的升力需求;通过公式和,求取所述轴对称飞行器全程的飞行攻角需求和侧滑角需求;其中,为轴对称飞行器技术指标要求的升力需求,为作用在轴对称飞行器上的动压,为轴对称飞行器的特征面积,为升力系数对飞行攻角的导数,为升力系数对侧滑角的导数。3.根据权利要求1所述的轴对称飞行器大机动控制方法,其特征在于,所述步骤2包括:所述轴对称飞行器在所有工况点下飞行时的舵面需求包括:在所述飞行攻角需求、所述侧滑角需求、所述马赫数需求下的俯仰通道所需的俯仰舵面与偏航通道所需的偏航舵面;所述俯仰通道所需的俯仰舵面,计算公式如下:所述偏航通道所需的偏航舵面,计算公式如下:其中,为任一飞行攻角、侧滑角、马赫数时的俯仰力矩系数,为任一飞行攻角、侧滑角、马赫数时的偏航力矩系数,
为任一飞行攻角、侧滑角、马赫数时的俯仰力矩系数对俯仰舵面的偏导数,为任一飞行攻角、侧滑角、马赫数时的偏航力矩系数对偏航舵面的偏导数。4.根据权利要求3所述的轴对称飞行器大机动控制方法,其特征在于,所述舵面满偏值包括所述俯仰通道的舵面满偏值和所述偏航通道的舵面满偏值;所述俯仰舵面满偏值为俯仰舵面的最大值;所述偏航舵面满偏值为偏航舵面的最大值。5.根据权利要求1所述的轴对称飞行器大机动控制方法,其特征在于,所述步骤3之前,还包括:计算所述轴对称飞行器x轴恒定不变的弹体系下的指令加速度,公式如下:其中,为轴对称飞行器的视线系指令加速度三分量,为重力加速度,为地面系到弹体系的转换矩阵,为视线系到地面系的转换矩阵。6.根据权利要求4所述的轴对称飞行器大机动控制方法,其特征在于,所述步骤3还包括:当在所有工况点下所述舵面需求且时,所述轴对称飞行器的飞行弹道全程采用侧滑转弯控制策略如下:当在所有工况点中的一工况点下所述舵面需求或时,将所述舵面需求大于所述舵面满偏值的飞行弹道视为大机动段,将所述舵面需求小于所述舵面满偏值的飞行弹道视为正常飞行段,所述轴对称飞行器采用倾斜转弯和侧滑转弯配合控制策略;所述轴对称飞行器在大机动段采用倾斜转弯控制策略,所述倾斜转弯控制策略如下:
所述轴对称飞行器在正常飞行段采用侧滑转弯控制策略,所述侧滑转弯控制策略如下:其中, 为弹上传感器测得的弹体实时的滚转角,为弹体滚转角指令,为弹体轴向加速度指令,弹体 轴向加速度指令,、 均为轴对称飞行器x轴恒定不变的弹体系下的指令加速度。7.根据权利要求6所述的轴对称飞行器大机动控制方法,其特征在于,所述轴对称飞行器采用倾斜转弯和侧滑转弯配合控制策略时,通过指令平滑的方式将所述倾斜转弯控制策略切换为侧滑转弯控制策略,所述指令平滑方式如下:其中,为轴对称飞行器开始切换控制策略的时刻,为轴对称飞行器实时飞行的时间,为轴对称飞行器切换控制策略的过渡时间间隔,,,为控制策略切换前一刻的控制指令,,,为控制策略切换后的第一帧控制指令。8.一种轴对称飞行器大机动控制装置,其特征在于,包括:飞行攻角与侧滑角确定模块,用于根据轴对称飞行器的技术指标确定所述轴对称飞行器飞行全程所需的飞行攻角、侧滑角与马赫数;舵面需求计算模块,用于根据所述飞行攻角需求、所述侧滑角需求与所述马赫数需求,计算所述轴对称飞行器在所有工况点下飞行时的舵面需求;控制策略选择模块,用于获取舵面满偏值,判断在所有工况点下所述舵面需求与所述舵面满偏值的大小;当在所有工况点下所述舵面需求均小于所述舵面满偏值时,所述轴对称飞行器的飞行弹道全程采用侧滑转弯控制策略;当在所有工况点中的一工况点下所述舵面需求大于或等于所述舵面满偏值时,所述轴对称飞行器根据所述舵面需求与所述舵面满偏值的大小将所述飞行弹道分为大机动段和正常飞行段,在所述大机动段采用倾斜转弯控制策略,在所述正常飞行段采用侧滑转弯控制策略。9.一种计算机可读存储介质,用于存储计算机程序,其特征在于,通过执行所述计算机程序,用于实现上述权利要求1-7中任意一项所述的轴对称飞行器大机动控制方法。10.一种轴对称飞行器大机动控制设备,其特征在于,用于实现上述权利要求1-7任意一项所述的轴对称飞行器大机动控制方法,包括:存储器和处理器;所述存储器用于储存计算机程序;所述处理器用于执行所述存储器存储的计算机程序。
技术总结
本发明提供了一种轴对称飞行器大机动控制方法及相关设备,其方法包括:根据轴对称飞行器的技术指标确定轴对称飞行器飞行全程所需的飞行攻角、侧滑角与马赫数;计算轴对称飞行器在所有工况点下飞行时的舵面需求;获取舵面满偏值,判断在所有工况点下舵面需求与舵面满偏值的大小;当在所有工况点下舵面需求均小于舵面满偏值时,飞行弹道全程采用侧滑转弯控制策略;当在所有工况点中的一工况点下舵面需求大于或等于舵面满偏值时,将飞行弹道分为大机动段和正常飞行段,在大机动段采用倾斜转弯控制策略,在正常飞行段采用侧滑转弯控制策略;充分发挥了轴对称飞行器的机动能力,同时保证了对轴对称飞行器飞行弹道的平稳与精确控制能力。控制能力。控制能力。
技术研发人员:鱼小军 罗世彬 廖宇新 王忠森
受保护的技术使用者:中南大学
技术研发日:2022.10.27
技术公布日:2022/11/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。