1.本发明涉及地图融合技术领域,特别涉及多机器人系统的地图融合方法。
背景技术:
2.地图构建是智能机器人完成自主导航等一系列复杂任务的前提,当前地图构建研究的重点正从小型简单静态场景转移到大型复杂动态场景,仅使用一个机器人完成建图任务变得越来越困难。在这一挑战的推动下,多机器人建图因其高效性而备受关注。与单个机器人相比,多机器人系统能够在一个任务中处理多个目标,明显地节省时间;在没有任何软硬件修改的情况下系统仍可适应于不同数量的情况;即便因不可抗因素导致部分个体停止时,系统也不会很大程度上被影响;另外,多机器人系统可以携带更多传感器,采集更加丰富的环境信息,提高环境检测结果的准确率。当多个机器人参与建图过程时,需要通过融合单个机器人构建的局部地图来构建全局地图以更好的表示环境。
3.多机器人地图融合主要包含三个步骤,即地图预处理、地图配准和地图融合。单个机器人分别绘制不同区域的局部地图后,为保证地图融合的精度,需要对地图进行预处理。但目前的地图融合处理技术仍存在,获得的地图边缘不够清晰,细节保留不完整等情况,大大降低了多机器人地图融合应用空间。
技术实现要素:
4.有鉴于此,本发明将小波变换应用于多机器人地图融合,采用了基于加权比和改进的边缘检测算子梯度的加权分析算法应用于多机器人的地图融合处理,有效地融合多机器人地图;得到的融合地图边缘清晰,地图细节完整性更好,提升视觉效果。
5.本发明通过以下技术手段解决上述技术问题:
6.一种基于小波变换的多机器人地图融合方法,包括以下步骤:
7.s1、多机器人在同一场景下从多个位置出发构建有重叠区域的局部地图;
8.s2、采用小波变换将各幅地图分解,获得低频图像分量、垂直、水平和对角高频图像分量;
9.s3、提取各幅地图的低频和高频特征信息,对分解后的低频系数和高频系数分别融合处理,获得新的低频系数和高频系数;
10.s4、对处理后的低频系数和高频系数进行重构,获得融合地图。
11.进一步,步骤s2中采用小波变换将各幅地图分解的具体步骤如下:
12.s201、将二维地图转换为在空间的投影ajf(x,y)表示:
[0013][0014]
其中:
[0015][0016]
s202、若hr、gr和hc、gc分别表示镜像共轭滤波器h和g作用在行和列上,将小波分解公式表示如下:
[0017][0018]
s203、对于原地图x,经n层的小波分解,得到相应的高频域小波系数和低频域尺度系数为和cn(x);
[0019]
s204、对于原地图y,经过n层小波分解,得到相应的高频域小波系数和低频域尺度系数为和cn(y)。
[0020]
进一步,步骤s3中对分解后的低频系数和高频系数分别融合处理具体步骤如下:
[0021]
s301、设定融合图像的低频系数为cn(z),低频子带系数的比率加权融合加权系数为a,即
[0022][0023]
低频系数的融合规则为:
[0024][0025]
s302、设定原地图x、原地图y的高频系数为f
x
(i,j)和fy(i,j),对两幅图像采用加权梯度融合方法,融合图像fz(i,j)如下所示:
[0026][0027]
进一步,步骤s4中对处理后的低频系数和高频系数进行重构的具体步骤如下:
[0028]
s401、利用小波变换的重构算法为:
[0029]
[0030]
其中,cj(x)为原地图x第(j 1)层的小波系数和尺度系数,c0(x)则为原地图x。
[0031]
本发明的有益效果:
[0032]
1、本发明将小波变换应用于多机器人地图融合,并基于加权比和改进的边缘检测算子梯度的加权分析算法,有效实现了多机器人的地图融合;
[0033]
2、本发明基于小波变换对于原始地图的分解与重构,获得的融合地图边缘更加清晰,地图细节保留更加完整,有效的提升了视觉效果。
附图说明
[0034]
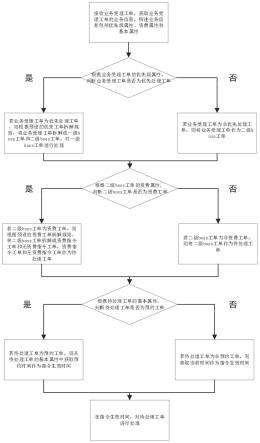
图1是本发明的基于小波变换的地图融合过程图;
[0035]
图2是本发明小波分解将原地图分解为4个子地图的示意图;
[0036]
图3是本发明实施例的gazebo仿真环境图;
[0037]
图4是本发明实施例的多机器人构建的地图展示图;
[0038]
图5是本发明实施例原地图x的1层小波分解图像;
[0039]
图6是本发明实施例原地图y的1层小波分解图像;
[0040]
图7是本发明实施例融合地图z的小波分解图像。
具体实施方式
[0041]
下面结合附图和实施例对本发明作进一步描述。
[0042]
如图1所示,一种基于小波变换的多机器人地图融合方法,包括以下步骤:
[0043]
s1、多机器人在同一场景下从多个位置出发构建有重叠区域的局部地图;
[0044]
s2、采用小波变换将各幅地图分解,获得低频图像分量、垂直、水平和对角高频图像分量;
[0045]
如图2所示,原始地图经过小波分解后得到4个子地图的示意图。任何给定的地图经过每一级小波变换后,将被分割成四幅大小与原始图像1/4相同的图像,左上角是平滑近似值,它是低频分量(ll)。左下、右上和右下分别显示竖直(hl)、水平(lh)和对角线(hh)高频分量。
[0046]
如图3所示,本发明使用的gazebo仿真环境图,采用linux操作系统下的物理仿真平台gazebo完成局部地图获取的仿真。仿真过程采用的机器人模型是turtlebot3 waffle,turtlebot3是一个低成本,可编程的基于ros的移动机器人。每一台turtlebot3可独自通过ros提供的gmapping功能包来建立自己所在周围环境的局部地图,该功能包提供包括对激光雷达的slam,根据激光雷达的输入及姿态数据建立一个基于栅格的2d地图。假设有两台turtlebot3分别建立了局部地图x和y以gazebo中的世界中心作为世界坐标系的坐标原点,确定了x和y初始位置与方向。
[0047]
图4是多机器人构建的地图,场景设为gazebo室内场景,共有3个房间,首尾两个房间分别有一台turtlebot3机器人在单独进行slam(机器人由上往下依次为:tbo,tb1),获取有一定重叠区域的两幅地图。
[0048]
通过步骤s3、提取各幅地图的低频和高频特征信息,对分解后的低频系数和高频
系数分别融合处理,获得新的低频系数和高频系数;
[0049]
s4、对处理后的低频系数和高频系数进行重构,获得融合地图;
[0050]
图4-7为本实施例获得融合图像,很容易看出本发明基于小波变换的多机器人地图融合方法,其能够有效地融合多机器人地图;得到的融合地图边缘清晰,地图细节得到了很好地保留,具有良好的视觉效果。
[0051]
以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。本发明未详细描述的技术、形状、构造部分均为公知技术。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。