1.本发明涉及交通气象监测技术领域,特别涉及一种激光遥感式路面状态测量系统及测量方法。
背景技术:
2.随着交通运输业的飞速发展,天气条件对交通运输的影响也越来越广泛,恶劣的天气条件给交通运输带来巨大的损失,甚至威胁人们的生命财产安全。气象是影响道路交通安全的重要因素之一。根据对我国的事故资料统计研究发现,大量的道路交通事故与气象条件有直接或间接的关系,我国经常出现的大范围冰雪天气中,公路交通事故伤亡率增加,事故率是正常情况下的十几倍。其中,积雪、积水、结冰、结霜、路面高温等气象条件改变了道面的物理性质,导致摩擦系数显著降低,从而危及行车安全。其直接影响主要表现在改变路面物理性质、观察视线、车辆自身安全性等方面,从而引发交通事故,据统计,在冰雪路面、积水路面与正常干燥路面3种情况下,交通事故发生的概率之比为4.2∶1.6∶1,在寒冷地区这种现象甚至更为严重。所以,及时准确的路面状态信息成为交通管制部门决策支持的关键组成部分。
3.现有技术的不足之处在于,现有大量使用的埋入式路面状态传感器,安装时要对路面进行了破坏,使用寿命取决于交通流量导致的地表沉降和道路维修周期,实际使用成本较高,难以进行大规模推广。而且,埋入式一般安装在路肩和路面上,安装过程以及后期的维护都很困难,成本较高。此外,埋入式探测法只能对较小区域(单个点)进行探测,在较易结冰的地点使用比较合适。如果需要对一个较大的区域进行检测,而且避免在安装、设备维护中对路面的破坏和交通的影响,需要使用非接触遥感式路面状态测量传感器。
技术实现要素:
4.本发明的目的克服现有技术存在的不足,为实现以上目的,采用一种激光遥感式路面状态测量系统及测量方法,以解决上述背景技术中提出的问题。
5.一种激光遥感式路面状态测量系统,所述测量系统包括:
6.光学测量模块,所述光学测量模块用于发射特定波长的测量激光照射路面目标物,并能够接收路面目标物反射的反射光,并光电转换成电信号;
7.弱信号检测模块,所述弱信号检测模块用于对在光学测量模块光电转换成的电信号进行信号处理;
8.数字信号处理模块,所述数字信号处理模块用于对信号处理后的电信号进行模数转换处理和算法反演。
9.作为本发明进一步的技术方案:所述光学测量模块包括若干个激光模块和探测器模块,且所述若干个激光模块和探测器模块形成一体化结构。
10.作为本发明进一步的技术方案:所述若干个激光模块的光源波长为1310nm、1440nm,以及1550nm波长,且激光模块均由激光二极管和光学透镜组成。
11.作为本发明进一步的技术方案:所述探测器模块采用的是铟镓砷光电探测器,且探测器模块前端设置有滤光片和凸透镜。
12.作为本发明进一步的技术方案:所述弱信号检测模块包括前置放大器、连接于前置放大器的相敏检波器、连接于相敏检波器的低通滤波器,以及脉冲发生器。
13.作为本发明进一步的技术方案:所述数字信号处理模块包括dsp模块和ad转换模块。
14.另一方面的技术方案:一种激光遥感式路面状态测量系统的测量方法,所述测量方法应用如上述任意一项所述的一种激光遥感式路面状态测量系统,所述测量方法步骤为:
15.若干个激光模块发射将经过脉冲发生器光源调制后的发射光经过透镜准直后照射目标物;
16.再通过探测器模块探测接收经过目标物反射的光反射信号,进行光电转换变成电信号;
17.将光电转换后的电信号经过弱信号检测模块进行信号处理;
18.根据信号处理后的信号输入数字信号处理模块,进行模数转换处理和算法反演,其中算法反演包括进行路面状态类型判断,以及根据路面状态类型计算目标物的厚度数据。
19.作为本发明进一步的技术方案:所述将光电转换后的电信号经过弱信号检测模块进行信号处理的具体步骤包括:
20.首先探测器模块将探测到的光信号转换为电信号,再通过前置放大器放大后,利用脉冲发生器、相敏检波器进行相敏检波,完成反射光的测量信号的解调;
21.将解调后的信号通过低通滤波器滤波,输入数字信号处理模块中。
22.作为本发明进一步的技术方案:所述根据信号处理后的信号输入数字信号处理模块,进行模数转换处理和算法反演,其中算法反演包括进行路面状态类型判断,以及根据路面状态类型计算目标物的厚度数据的具体步骤包括:
23.在干燥状态下,测量信号经过ad转换模块转换化后,提取出三个波段的反射信号i
1310nm
、i
1440nm
和i
1550nm
,并进行归一化处理,得到信号i
r(1310nm)
、i
r(1440nm)
和i
r(1550nm)
;
24.i
r(1310nm)
、i
r(1440nm)
和i
r(1550nm)
输入dsp模块进行计算,得到ln(i
r(1310nm)
/i
r(1440nm)
)、ln(i
r(1440nm)
/i
r(1550nm)
)和ln(i
r(1310nm)
/i
r(1550nm)
);
25.当ln(i
r(1310nm)
/i
r(1440nm)
)、ln(i
r(1440nm)
/i
r(1550nm)
)和ln(i
r(1310nm)
/i
r(1550nm)
)均大于0.9时,则当前反射信号较强,且反射对光频率不敏感,判断得到路面状态类型为干燥状态;
26.当i
1310nm
》0.9且i
1550nm
《0.2时,根据雪对不同波长激光的吸收强度特征,判断得到路面状态类型为雪状态,通过雪厚度计算公式:d
snow
=k
snow
*i
1310nm
b
snow
计算雪膜厚度,其中k
snow
和b
snow
由定标实验获取;
27.当ln(i
r(1440nm)
/i
r(1550nm)
)》0时,判断得到路面状态类型为冰状态,通过冰厚度计算公式:d
ice
=k
ice
ln(i
r(1440nm)
/i
r(1550nm)
) b
ice
计算冰膜厚度,其中k
ice
、b
ice
由定标实验获取;
28.当ln(i
r(1440nm)
/i
r(1550nm)
)《0时,判断得到路面状态类型为为水状态,通过水厚度计算公式:d
water
=k
water
ln(i
r(1440nm)
/i
r(1550nm)
) b
water
计算水膜厚度,其中k
water
、b
water
由定标实验获取。
29.与现有技术相比,本发明存在以下技术效果:
30.(1)本发明采用了非接触遥感式红外光学的测量系统对被测道面反射光谱进行测量,通过相关算法不仅实现了多种道面状态的准确识别:干燥、雪、水、冰等,并能对水膜、冰膜厚度进行定量测量,为摩擦力反演提供必要的参数;
31.(2)本发明的光学测量系统中光学测量模块采用高速脉冲调制,信号调理电路中的带通滤波电路能够对直流噪声信号以及不同调制光频率的信号进行有效滤除;同时,在探测器模块前端安装了滤光片,避免了环境各种杂散光或是太阳光反射等干扰对测量造成的影响,提高了系统的稳定性;
32.(3)本发明的光学测量模块采用主动遥感式测量方法,安装在被测道路旁边的立杆上,进行远距离测量,不影响车辆运行和道路的正常状态、实用性强,适用于高速公路、机场跑道等表面状态的定点式或移动式测量;
33.(4)本发明实现了道面状态的非接触式精确测量,具有响应速度快、识别率高、精度高等优点。
附图说明
34.下面结合附图,对本发明的具体实施方式进行详细描述:
35.图1为本技术公开的实施例的激光遥感式路面状态测量系统的结构示意图;
36.图2为本技术公开的实施例的冰和水的近红外光谱吸收谱图;
37.图3为本技术公开的实施例的雪的反射光谱图;
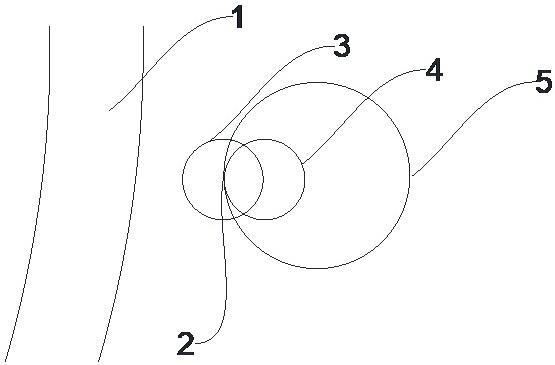
38.图4为本技术公开的实施例的冰、水的厚度测量原理图。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.请参考图1,本发明实施例中,一种激光遥感式路面状态测量系统,所述测量系统包括光学测量模块、弱信号检测模块,以及数字信号处理模块;
41.光学测量模块,所述光学测量模块用于发射设置的不同特定波长的测量激光照射路面目标物,并能够接收路面目标物反射的反射光,具体实施方式中,所述光学测量模块包括3个激光模块和一个探测器模块,且3个激光模块和1个探测器模块进行组合安装,形成一体化的测量结构,且3个激光模块和1个探测器模块中设置有透镜,且透镜的光学轴线的方向平行。
42.且3个激光模块的光源波长设定为1310nm、1440nm,以及1550nm波长,每个激光模块均由激光二极管和光学透镜组成。
43.具体的,探测器模块采用的是铟镓砷光电探测器,且探测器模块前端设置有滤光片和凸透镜。具体实施方式中,探测器模块由透镜、光信号探测器、滤光片等组成。光信号探测器前安装有的滤光片,经过接收端的凸透镜后再聚汇到光信号探测器表面,在光信号探测器前安装滤光片,是为了滤除不在光源波段上的杂散光。
44.弱信号检测模块,所述弱信号检测模块用于对接收到的路面目标物反射的反射光转换成的电信号进行信号处理,本实施例中,所述弱信号检测模块包括前置放大器、连接于前置放大器的相敏检波器、连接于相敏检波器的低通滤波器,以及脉冲发生器。其中,脉冲发生器与激光模块相连接,能够产生脉冲对三个激光模块均进行控制,发出的激光脉冲光频率为4k,同时连接到相敏检波器,用于微弱信号的弱信号检测。
45.三个不同波段下的反射光经过探测器模块光电转化后,并通过弱信号检测模块进行信号放大,首先通过前置放大器前置放大和滤波处理,通过相敏检波器和脉冲发生器产生的信号进行相敏检波,在经过低通滤波器滤波后输入数字信号处理模块;
46.所述数字信号处理模块包括用于对光源进行调制的dsp模块和ad转换模块。
47.本实施例中,具体过程为:数字信号处理模块能够控制脉冲发生器产生4k的方波信号作为调制信号对光源进行调制,克服测量过程中外界杂散光的影响;得到低通滤波器滤波后的信号,在dsp模块的控制下进行模数转化,以及ad转换模块进行ad转换,通过dsp模块相应的算法处理,得到数字化的反射光强,光强信号在系统软件中进行相应的反演算法模型处理,得到最终测量结果路面的状态和冰水膜的厚度,并输出。
48.另一方面的技术方案:一种激光遥感式路面状态测量系统的测量方法,所述测量方法采用了上述测量系统进行工作,所述测量方法的具体步骤为:
49.首先通过设置好的3个激光模块发射经过脉冲发生器光源调制后的发射光,同时经过透镜准直后照射地面的目标物,目标物一般为地面积水、积雪,以及冰层等;
50.再通过与3个激光模块设置在一起的探测器模块探测接收经过地面积水、积雪,以及冰层等目标物反射的光反射信号,并将该光反射信号进行光电转换变成电信号;
51.然后将光电转换后的电信号经过弱信号检测模块进行信号处理,具体步骤包括:
52.首先探测器模块将探测到的光信号转换为电信号,再通过前置放大器放大后,利用脉冲发生器、相敏检波器进行相敏检波,完成反射光的测量信号的解调;将解调后的信号通过低通滤波器滤波,输入数字信号处理模块中。
53.根据信号处理后的信号输入数字信号处理模块,进行模数转换处理和算法反演,其中算法反演包括进行路面状态类型判断,以及根据路面状态类型计算目标物的厚度数据。具体步骤包括:
54.具体实施方式中,在干燥状态下,测量信号经过ad转换模块转换化后,提取出三个波段的反射信号i
1310nm
、i
1440nm
和i
1550nm
,并进行归一化处理,得到信号i
r(1310nm)
、i
r(1440nm)
和i
r(1550nm)
;
55.所述归一化处理具体为,对干燥路面进行测量,取平均值,得到i
1310nm(干燥)
、i
1440nm(干燥)
和i
1550nm(干燥)
,并将数据存入dps模块中,后续测量的信号i
r(1310nm)
、i
r(1440nm)
和i
r(1550nm)
通过公式:和进行归一化处理;
56.i
r(1310nm)
、i
r(1440nm)
和i
r(1550nm)
输入dsp模块进行计算,得到ln(i
r(1310nm)
/i
r(1440nm)
)、ln(i
r(1440nm)
/i
r(1550nm)
)和ln(i
r(1310nm)
/i
r(1550nm)
);
57.当ln(i
r(1310nm)
/i
r(1440nm)
)、ln(i
r(1440nm)
/i
r(1550nm)
)和ln(i
r(1310nm)
/i
r(1550nm)
)均大于0.9时,则当前反射信号较强,且反射对光频率不敏感,判断得到路面状态类型为干燥状态;
58.当i
1310nm
》0.9且i
1550nm
《0.2时,根据雪对不同波长激光的吸收强度特征,判断得到路面状态类型为雪状态,通过雪厚度计算公式:d
snow
=k
snow
*i
1310nm
b
snow
计算雪膜厚度,其中k
snow
和b
snow
由定标实验获取;
59.当ln(i
r(1440nm)
/i
r(1550nm)
)》0时,判断得到路面状态类型为冰状态,通过冰厚度计算公式:d
ice
=k
ice
ln(i
r(1440nm)
/i
r(1550nm)
) b
ice
计算冰膜厚度,其中k
ice
、b
ice
由定标实验获取;
60.当ln(i
r(1440nm)
/i
r(1550nm)
)《0时,判断得到路面状态类型为为水状态,通过水厚度计算公式:d
water
=k
water
ln(i
r(1440nm)
/i
r(1550nm)
) b
water
计算水膜厚度,其中k
water
、b
water
由定标实验获取。
61.工作原理:
62.首先,在路面积雪的情况下,雪累积达到一定的厚度情况下,光线难以穿透雪层,通过测量雪的反射光谱进行雪的辨识,并开展雪深厚度的测量技术研究。如图3所示为雪层的反射光谱图。
63.根据图中雪光谱反射率数据,可以得到雪的反射能力在可见光波段处于极高水平,约为95%,而在进入近红外波段后,其反射系数快速下降,在1.5um附近降至极低水平,约为2%左右,即总体上在近红外波段随波长增加而吸收能力增强,并于1.5um处达到吸收系数的极值。因此,在积雪条件下,1.3um附近反射率rsnow设置为90%。同时,在1.3um附近的光谱上,雪对其有较强的反射效率,到达45%左右,而且反射光强度与厚度在一定范围有相关性:
64.d
snow
=k
snow
*i
1310nm
b
snow
65.d
snow
是雪的厚度,i
1310nm
是1.3um波段光的反射强度,k
snow
、b
snow
是公式的斜率和截距,可以通过定标实验确定。
66.该公式即用于测量积雪厚度的测量。
67.其次,在路面积水和积冰的情况下,如图2可以得到冰和水在0.95~2.0um波段上的吸收光谱。从可见光波段到1.3um,冰、水对光的吸收能力很弱,但水、冰分别在1.44μm、1.55um附近有一个吸收峰,这两个吸收峰宽度均较窄,约为0.3μm左右,峰值区别明显。可以利用1.44um和1.55um附近的窄带单色光实现对二者的识别和测量。
68.如图4所示,图示为冰、水的厚度测量原理图。图中入射光强i0,反射光强度ir,冰或水的吸收系数α,x是光在介质中的行程,h为膜的厚度,ks表示冰或水表面反射率,ρb表示在道路表面反射率,则第一个波段的测量反射光强i
r(x,λ1)
为:
69.i
r(x,λ1)
=i
0λ1ks
ρbexp(-α
λ1
2x);
70.本实施例中,采用3个波段测量光源,另外两个波段的反射光强是i
r(x,λ2)
和i
r(x,λ3)
,可以得到:
[0071][0072]
其中h=x*cosθ,简化后得到:
[0073][0074]
该公式即用于测量积水和积冰的厚度。
[0075]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。