1.本发明属于汽车前照灯控制领域,具体涉及一种前照灯调光步进电机零点自校正系统、方法及汽车。
背景技术:
2.前照灯调光步进电机是将电信号转变为角位移的一种开环式控制电机,主要体现为接收脉冲信号,通过调整占空比,改变驱动能量,实现步进电机的微步驱动。其中,输入脉冲的数量决定步进电机的角位移,脉冲的频率决定步进电机的频率,步进电机绕组的相序,决定步进电机的正转或反转。前照灯调光步进电机带动前照灯内部调光螺杆旋转,实现前照灯内部照明模组的高度调节或水平调节。
3.步进电机零点是指参考零点,实现角度和位置控制的前提均是在参考零点的基础上。由于步进电机为开环控制,进行微步驱动过程中,无法反馈每次驱动过程中的实际运动距离及位置信息,精度问题导致在常年累月的驱动后零点漂移的全局零点位置p
global
与真实零点位置p
real
不相同(即不贴合),影响前照灯调光系统的初始精度,进而影响前照灯调光精度。
4.目前步进电机零点校正方法主要有:
5.(1)物理碰撞检测归零。即在零点处安装停止挡板,步进电机在零点方向上回位过程中,在挡板停止后即归零,原理简单,步进电机与挡板发生物理碰撞后容易对步进电机和传动机构造成损伤,且不适用前照灯,因为前照灯照明模组是在零点基础上进行高度和水平调节。
6.(2)调节占空比,使得频率逐渐衰减,步进电机得以恒定转速且扭矩逐步减小回到零位,有效地保护了电机和传动机构。但步进电机无位置信息反馈,尤其在adb系统(即自适应远光系统)中存在多组步进电机控制,报文信息间隔时间为毫秒级,高功能安全等级要求下,多组电机多路通信需保证即时调节;调整占空比会占用信息通道,影响adb的调节功能。
技术实现要素:
7.本发明的目的是提供一种前照灯调光步进电机零点自校正系统、方法及汽车,以保证前照灯调光系统的初始精度。
8.本发明所述的前照灯调光步进电机零点自校正系统,包括控制模块、步进电机驱动模块、存储模块、前照灯调光步进电机和传感器模块,控制模块与步进电机驱动模块、存储模块连接,步进电机驱动模块与前照灯调光步进电机连接,传感器模块与前照灯调光步进电机、控制模块连接。
9.优选的,所述传感器模块为正交光电编码器。
10.本发明所述的前照灯调光步进电机零点自校正方法,采用上述系统,该方法包括:
11.控制模块在收到进行前照灯调光步进电机零点自校正请求时,进入零点自校正模式。
12.在零点自校正模式下,控制模块将传感器模块测量的前照灯调光步进电机的初始位置p0作为全局零点位置p
global
,读取存储在存储模块内的真实零点位置p
real
,然后判断全局零点位置p
global
与真实零点位置p
real
的位置关系。
13.若全局零点位置p
global
与真实零点位置p
real
相同(即全局零点位置p
global
与真实零点位置p
real
贴合),则退出零点自校正模式。
14.若全局零点位置p
global
与真实零点位置p
real
不相同(即全局零点位置p
global
与真实零点位置p
real
不贴合),则控制模块基于全局零点位置p
global
与真实零点位置p
real
的位置关系,以前照灯调光步进电机的实际位置作为反馈信号,产生脉冲信号闭环控制步进电机驱动模块驱动前照灯调光步进电机正转或反转,当前照灯调光步进电机转动至真实零点位置p
real
时,控制步进电机驱动模块使前照灯调光步进电机停止转动(此时完成回零),退出零点自校正模式。
15.优选的,所述前照灯调光步进电机的实际位置为将前照灯调光步进电机的测量位置与预测位置进行基于相似度的数据融合而得到的位置。前照灯调光步进电机的测量位置由传感器模块测量得到,前照灯调光步进电机的预测位置由控制模块根据前照灯调光步进电机的初始位置p0和所述脉冲信号预测得到。
16.优选的,控制模块将前照灯调光步进电机的测量位置与预测位置进行基于相似度的数据融合,得到前照灯调光步进电机的实际位置的方式包括:
17.利用公式:确定z1(k)与z2(k)的相似度s
12
(k)以及z2(k)与z1(k)的相似度s
21
(k)。
18.利用公式:确定z1(k)与z3(k)的相似度s
13
(k)以及z3(k)与z1(k)的相似度s
31
(k)。
19.利用公式:确定z2(k)与z3(k)的相似度s
23
(k)以及z3(k)与z2(k)的相似度s
32
(k)。
20.确定z1(k)与z1(k)的相似度s
11
(k)=1,确定z2(k)与z2(k)的相似度s
22
(k)=1,确定z3(k)与z3(k)的相似度s
33
(k)=1。其中,n为数据融合源的个数,n=3,z1(k)为k时刻前照灯调光步进电机的测量位置,z2(k)为k时刻前照灯调光步进电机的预测位置,(k)为k时刻前照灯调光步进电机的预测位置,(即z3(k)表示k时刻前照灯调光步进电机的测量位置与预测位置的平均值),z2(k-1)为k-1时刻前照灯调光步进电机的预测位置,v
k-1
为k-1时刻前照灯调光步进电机的速度,a
k-1
为k-1时刻前照灯调光步进电机的加速度,δt为相邻两个脉冲的时间间隔,z2(0)=z1(0)=p0(即前照灯调光步进电机的预测位置的初始值等于测量位置的初始值,也就是等于前照灯调光步进电机的初始位置p0),v
k-1
、a
k-1
、δt通过解析脉冲信号得到,k=1,2,3,...。
21.利用公式:计算k时刻z1(k)的一致性测度c1(k)(即k时刻z1(k)与z2(k)、z3(k)的接近程度)。
22.利用公式:计算k时刻z2(k)的一致性测度c2(k)(即k时刻z2(k)与z1(k)、z3(k)的接近程度)。
23.利用公式:计算k时刻z3(k)的一致性测度c3(k)(即k时刻z3(k)与z1(k)、z2(k)的接近程度)。
24.利用公式:计算k时刻前照灯调光步进电机的测量位置z1(k)的一致性测度的均值e[c1(k)]和方差
[0025]
利用公式:计算k时刻前照灯调光步进电机的预测位置z2(k)的一致性测度的均值e[c2(k)]和方差
[0026]
利用公式:计算k时刻z3(k)的一致性测度的均值e[c3(k)]和方差
[0027]
利用公式:计算k时刻前照灯调光步进电机的测量位置z1(k)的权重系数w1(k)。利用公式:计算k时刻前照灯调光步进电机的预测位置z2(k)的权重系数w2(k)。利用公式:(k)。利用公式:计算k时刻z3(k)的权重系数w3(k)。其中,β为预设的系数,0<β≤1。
[0028]
利用公式:计算得到k时刻前照灯调光步进电机的实际位置d(k)。
[0029]
优选的,当满足条件1a~条件1d中的任一条件时,整车控制器生成进行前照灯调光步进电机零点自校正请求,并将该请求发送至控制模块;其中,
[0030]
条件1a为:收到车辆解锁信号;
[0031]
条件1b为:检测到近光开关打开信号或者远光开关打开信号;
[0032]
条件1c为:阳光雨量传感器检测到外界光线达到近光灯开启条件;
[0033]
条件1d为:检测到自适应远光开关打开信号。
[0034]
本发明所述的汽车,包括上述前照灯调光步进电机零点自校正系统。
[0035]
本发明具有如下效果:
[0036]
(1)前照灯调光步进电机零点自校正方法从前照灯调光步进电机的初始位置出发,只朝正确的位置方向回到真实零点位置p
real
,完成自动回零,尽可能减少了不必要的错误行程,较快地实现了自动回零,保证了前照灯调光系统的初始精度。
[0037]
(2)基于全局零点位置p
global
与真实零点位置p
real
的位置关系,以前照灯调光步进电机的实际位置作为反馈信号,产生脉冲信号闭环控制步进电机驱动模块驱动前照灯调光步进电机正转或反转,实现零点自校正,前照灯调光步进电机的实际位置由前照灯调光步进电机的测量位置与预测位置进行基于相似度的数据融合得到,前照灯调光步进电机的实际位置非常精准,从而更好的保证了前照灯调光系统的初始精度。
[0038]
(3)前照灯调光步进电机零点自校正方法对智能前照灯控制系统的改进和性能提升具有重要意义。
附图说明
[0039]
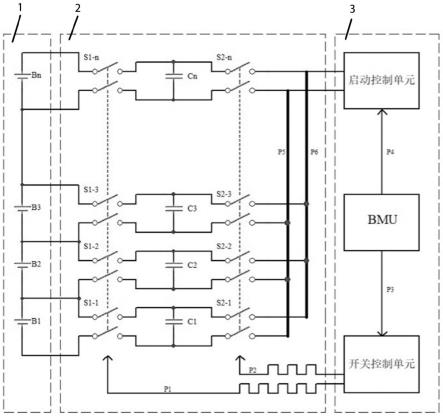
图1为本实施例中前照灯调光步进电机零点自校正系统的架构图。
[0040]
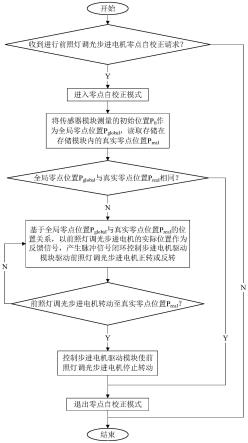
图2为本实施例中前照灯调光步进电机零点自校正方法流程图。
具体实施方式
[0041]
如图1所示,本实施例中的前照灯调光步进电机零点自校正系统,包括控制模块1、步进电机驱动模块2、存储模块3、前照灯调光步进电机4和传感器模块5,传感器模块5为正交光电编码器。控制模块1与步进电机驱动模块2、存储模块3连接,步进电机驱动模块2与前照灯调光步进电机4连接,传感器模块5与前照灯调光步进电机4、控制模块1连接。控制模块1用于产生脉冲信号控制步进电机驱动模块2驱动前照灯调光步进电机4转动(正转/反转)。存储模块3用于真实零点位置p
real
以及前照灯调光步进电机4运动过程中的位置信息与时间信息。传感器模块5用于测量前照灯调光步进电机4的位置。
[0042]
如图2所示,本实施例中的前照灯调光步进电机零点自校正方法,采用上述前照灯调光步进电机零点自校正系统,该前照灯调光步进电机零点自校正方法中控制模块1执行如下步骤:
[0043]
步骤一、判断是否收到进行前照灯调光步进电机零点自校正请求,如果是,则执行步骤二,否则结束。
[0044]
当满足条件1a~条件1d中的任一条件时,整车控制器会生成进行前照灯调光步进电机零点自校正请求,并将该请求发送至控制模块1。其中,条件1a为:收到车辆解锁信号;条件1b为:检测到近光开关打开信号或者远光开关打开信号;条件1c为:阳光雨量传感器检测到外界光线达到近光灯开启条件;条件1d为:检测到自适应远光开关打开信号。
[0045]
步骤二、进入零点自校正模式,然后执行步骤三。
[0046]
步骤三、将传感器模块5测量的前照灯调光步进电机的初始位置p0作为全局零点位置p
global
,读取存储在存储模块3内的真实零点位置p
real
,然后执行步骤四。
[0047]
步骤四、判断是否全局零点位置p
global
与真实零点位置p
real
相同,如果是,则执行步骤八,否则执行步骤五。
[0048]
步骤五、基于全局零点位置p
global
与真实零点位置p
real
的位置关系,以前照灯调光步进电机4的实际位置作为反馈信号,产生脉冲信号闭环控制步进电机驱动模块2驱动前照灯调光步进电机4正转或反转,然后执行步骤六。
[0049]
设定真实零点位置p
real
与x轴正方向的夹角为0,若全局零点位置p
global
与x轴正方向的夹角为正,则调整前照灯调光步进电机绕组相序,闭环控制步进电机驱动模块2驱动前照灯调光步进电机4反转;若全局零点位置p
global
与x轴正方向的夹角为负,则调整前照灯调光步进电机绕组相序,闭环控制步进电机驱动模块2驱动前照灯调光步进电机4正转。其中,前照灯调光步进电机的实际位置为将前照灯调光步进电机的测量位置与预测位置进行基于相似度的数据融合而得到的位置。前照灯调光步进电机的测量位置由传感器模块5测量得到,前照灯调光步进电机的预测位置由控制模块1根据前照灯调光步进电机的初始位置
p0和产生的脉冲信号预测得到。
[0050]
控制模块1将前照灯调光步进电机的测量位置与预测位置进行基于相似度的数据融合,得到前照灯调光步进电机的实际位置的方式包括:
[0051]
首先,利用公式:确定z1(k)与z2(k)的相似度s
12
(k)以及z2(k)与z1(k)的相似度s
21
(k)。
[0052]
利用公式:确定z1(k)与z3(k)的相似度s
13
(k)以及z3(k)与z1(k)的相似度s
31
(k)。
[0053]
利用公式:确定z2(k)与z3(k)的相似度s
23
(k)以及z3(k)与z2(k)的相似度s
32
(k)。
[0054]
由于数据融合源与自身的相似度为1,因此确定z1(k)与z1(k)的相似度s
11
(k)=1,确定z2(k)与z2(k)的相似度s
22
(k)=1,确定z3(k)与z3(k)的相似度s
33
(k)=1。其中,n为数据融合源的个数,n=3,z1(k)为k时刻前照灯调光步进电机的测量位置,z2(k)为k时刻前照灯调光步进电机的预测位置,(即z3(k)表示k时刻前照灯调光步进电机的测量位置与预测位置的平均值),z2(k-1)为k-1时刻前照灯调光步进电机的预测位置,v
k-1
为k-1时刻前照灯调光步进电机的速度,a
k-1
为k-1时刻前照灯调光步进电机的加速度,δt为相邻两个脉冲的时间间隔,z2(0)=z1(0)=p0(即前照灯调光步进电机的预测位置的初始值等于测量位置的初始值,也就是等于前照灯调光步进电机的初始位置p0),v
k-1
、a
k-1
、δt通过解析脉冲信号得到,k=1,2,3,...。
[0055]
其次,利用公式:计算k时刻z1(k)的一致性测度c1(k)(即k时刻z1(k)与z2(k)、z3(k)的接近程度)。
[0056]
利用公式:计算k时刻z2(k)的一致性测度c2(k)(即k时刻z2(k)与z1(k)、z3(k)的接近程度)。
[0057]
利用公式:计算k时刻z3(k)的一致性测度c3(k)(即k时刻z3(k)与z1(k)、z2(k)的接近程度)。
[0058]
由于c1(k)、c2(k)、c3(k)仅考虑了某一时刻(即k时刻)的数据一致性,而在整个时间序列(即1时刻至k时刻)中,数据的一致性并不统一。因此,需要对其可靠性进行评估,以便在整个过程中表现出很好的一致性。[c1(1),c1(2),
…
,c1(k)]表示z1(k)在1时刻至k时刻的一致性测度的时间序列,[c2(1),c2(2),
…
,c2(k)]表示z2(k)在1时刻至k时刻的一致性测度的时间序列,[c3(1),c3(2),
…
,c3(k)]表示z3(k)在1时刻至k时刻的一致性测度的时间序列,并引入一致性测度的均值和方差评估z1(k)、z2(k)、z3(k)的可靠性。
[0059]
再次,利用公式:计算k时刻前照灯调光步进电机的测量位置z1(k)的一致性测度的均值e[c1(k)]和方差
[0060]
利用公式:计算k时刻前照灯调光步进电机的预测位置z2(k)的一致性测度的均值e[c2(k)]和方差
[0061]
利用公式:计算k时刻z3(k)的一致性测度的均值e[c3(k)]和方差
[0062]
对于一致性测度均值越大,方差越小的数据融合源,其测量性能表现越稳定;因此,在接下来的数据融合过程中,可占据较大的比重。
[0063]
设定k时刻前照灯调光步进电机的测量位置z1(k)的权重系数为w1(k),k时刻前照灯调光步进电机的预测位置z2(k)的权重系数为w2(k),设定k时刻z3(k)的权重系数为w3(k)。由一致性测度的方差可知,w1(k)与e[c1(k)]呈正相关关系,w1(k)与呈负相关关系,w2(k)与e[c2(k)]呈正相关关系,w2(k)与呈负相关关系,w3(k)与e[c3(k)]呈正相关关系,w3(k)与呈负相关关系。引入一个线性定义的映射关系,即:
[0064]
然后,利用公式:计算w1(k);利用公式:计算w2(k);利用公式:计算w3(k)。其中,β为预设的系数,0<β≤1。β的值越大,一致性测度的方差对权重系数的影响越大。为扩大方差的影响,β的值可取1。
[0065]
最后,利用公式:计算得到k时刻前照灯调光步进电机的实际位置d(k)。
[0066]
步骤六、判断是否前照灯调光步进电机4转动至真实零点位置p
real
,如果是,则执行步骤七,否则返回执行步骤五。
[0067]
若前照灯调光步进电机4的实际位置与真实零点位置p
real
相同,则表示前照灯调光步进电机4转动至真实零点位置p
real
,否则表示前照灯调光步进电机4还未转动至真实零点位置p
real
。
[0068]
步骤七、控制步进电机驱动模块2使前照灯调光步进电机4停止转动,然后执行步骤八。
[0069]
步骤八、退出零点自校正模式,然后结束。
[0070]
本实施例还提供一种汽车,该汽车包括如图1所示的前照灯调光步进电机零点自校正系统。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。