1.本发明属于电磁场数值求解领域,具体为一种基于恢复型后验误差估计的网格自适应方法。
背景技术:
2.随着计算机技术的发展,采用仿真技术对微波元器件的电磁场分布进行预先分析,是一种经济而有效的手段,因此在设计阶段采用电磁仿真软件对微波元器件电磁特性进行仿真计算是产品周期中必不可少的步骤。而对于计算机仿真来说,求解精度是一项备受关注的问题,提高求解精度也是计算机仿真的重要发展方向。对于有限元法来说,通常,模型离散的网格尺寸越小,仿真计算结果就越准确。但是,如果只凭经验进行对某些计算区域进行网格加密,这是缺乏科学依据的,会带来很多不确定的结果。因此,网格自适应加密被提出来解决这一问题,通过得到的后验误差估计指示子,对当前网格实施细化加密或粗化调整,进而给出下一步计算的网格,并通过自适应误差判断结果是否收敛。
3.后验误差估计是自适应的一个重要步骤。在误差估计时,因为解析解是未知的,因此不能直接利用结果进行误差计算,需要通过其它手段进行误差估计。恢复型后验误差估计方法就是一种常用的方法。该方法首先构造一种恢复解来代替解析解,然后构造某种单元范数作为误差的度量,利用这种范数获得网格加密指示,然后进行网格加密。
4.恢复型后验误差估计方法的核心是恢复解的构造。传统的恢复解构造方法,如基于超收敛特性的拼片修复法spr及其改进算法,存在计算量大、处理复杂、在边界上需要特殊处理等问题。因此,需要构造一种计算量较小、构造简单、具有普适性的恢复解用于后验误差估计,实现网格自适应加密。
技术实现要素:
5.针对上述存在的问题,为解决现有网格自适应加密由于恢复解构造导致计算量大、处理复杂、普适性不高(在边界上需要特殊处理)等问题,本发明提供了一种基于恢复型后验误差估计的网格自适应方法,利用最小二乘原理构造恢复解,完成后验误差估计,实现网格自适应加密。
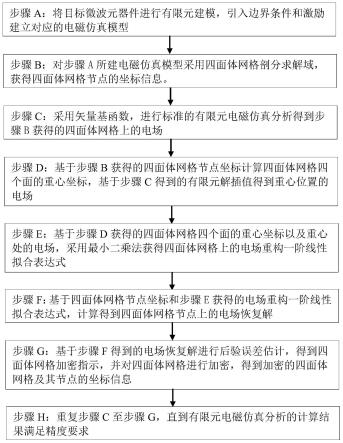
6.一种基于恢复型后验误差估计的网格自适应方法,包括以下步骤:
7.a.将目标微波元器件进行有限元建模,引入边界条件和激励建立对应的电磁仿真模型。
8.b.对步骤a所建电磁仿真模型采用四面体网格剖分求解域,获得四面体网格节点的坐标信息。
9.c.采用矢量基函数,进行标准的有限元电磁仿真分析得到步骤b获得的四面体网格上的电场。
10.d.基于步骤b获得的四面体网格节点坐标计算四面体网格四个面的重心坐标,基于步骤c得到的有限元解插值得到重心位置的电场。
11.e.基于步骤d获得的四面体网格四个面的重心坐标以及重心处的电场,采用最小二乘法获得四面体网格上的电场重构一阶线性拟合表达式。
12.f.基于四面体网格节点坐标和步骤e获得的电场重构一阶线性拟合表达式,计算得到四面体网格节点上的电场恢复解。
13.g.基于步骤f得到的电场恢复解进行后验误差估计,得到四面体网格加密指示,并对四面体网格进行加密,得到加密的四面体网格及其节点的坐标信息。
14.h.重复步骤c至步骤g,直到有限元电磁仿真分析的计算结果满足精度要求。
15.本发明首先对目标微波元器件进行有限元建模,引入边界条件和激励建立对应的电磁仿真模型;然后,采用四面体网格剖分求解域,对模型进行有限元电磁仿真分析,计算出四面体网格四个面的重心处的电场,利用重心处的电场,采用最小二乘原理重新拟合出四面体网格上的电场重构一阶线性拟合表达式;接着利用重构拟合表达式计算出节点处的恢复解,结合节点处的电场,进行后验误差估计;最后根据四面体网格上的误差对网格进行加密,加密后再进行有限元电磁仿真分析,直至有限元解符合精度要求。
16.综上所述,本发明中,通过采用最小二乘法,基于单个四面体网格上的有限元解和四面体网格的坐标信息即可实现单个四面体网格上恢复解的构造,无需额外的信息;且以单个四面体为最小实施单元,也不需要和其它四面体网格进行数据交互,因此信息相对集中,避免了在边界上需要特殊处理的问题,提高了普适性。本发明方法工程实现较简单,计算量小,普适性高。
附图说明
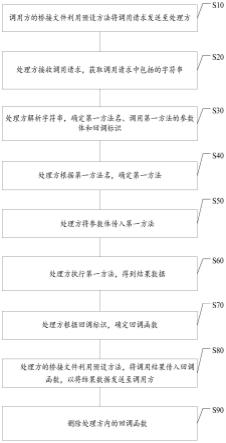
17.图1是本发明的流程图;
18.图2是实施例的模型图;
19.图3是实施例的四面体网格;
20.图4是实施例自适应前后的网格数对比图。
具体实施方式
21.下面结合附图和实施例来详细说明本发明的技术方案。
22.参照图1,一种基于恢复型后验误差估计的网格自适应方法,包含以下步骤:
23.a.将目标微波元器件进行有限元建模,引入边界条件和激励建立对应的电磁仿真模型。
24.本发明实施例以魔t的电磁传输分析为例,建立如图2所示的模型结构,引入4个波端口激励,模型边界为理想电边界。
25.b.对步骤a所建电磁仿真模型采用四面体网格剖分求解域,获得四面体网格节点的坐标信息。
26.采用四面体网格剖分计算域模型是有限元方法中的一种公知过程,因此本步骤不再详细描述,笛卡尔坐标系下,四面体网格节点如图3所示表示为1,2,3,4四个节点。
27.c.采用矢量基函数,进行标准的有限元电磁仿真分析得到步骤b获得的四面体网格上的电场。
28.本问题的控制方程为矢量波动方程,试探函数为一阶矢量基函数有限元电磁
仿真分析是一种公知的过程,此处不再详细阐述。基于棱边的有限元解和矢量基函数,插值得到四面体网格上任意点的矢量电场为:
[0029][0030]
其中,是第e个四面体网格第j条边的基函数,是第e个四面体网格第j条边的解,x,y,z为笛卡尔坐标系的三个坐标方向分量。
[0031]
d.基于步骤b获得的四面体网格节点坐标计算四面体网格四个面的重心坐标,基于步骤c得到的有限元解插值得到重心位置的电场;
[0032]
如图3所示,四面体四个面分别命名为f1,f2,f3,f4,其中f1为节点2、3、4连线组成的面,其中f2为节点1、3、4连线组成的面,其中f3为节点1、2、4连线组成的面,其中f4为节点1、2、3连线组成的面。四面体网格四个面的重心表示为5,6,7,8四个点,其中点5为面f1的重心点,点6为面f2的重心点,点7为面f3的重心点,点8为面f4的重心点。
[0033]
四面体网格面f1的重心坐标为
[0034]
x5=(x2 x3 x4)/3,y5=(y2 y3 y4)/3,z5=(z2 z3 z4)/3
ꢀꢀ
(2)
[0035]
四面体网格面f2的重心坐标为
[0036]
x6=(x1 x3 x4)/3,y6=(y1 y3 y4)/3,z6=(z1 z3 z4)/3
ꢀꢀ
(3)
[0037]
四面体网格面f3的重心坐标为
[0038]
x7=(x1 x2 x4)/3,y7=(y1 y2 y4)/3,z7=(z1 z2 z4)/3
ꢀꢀ
(4)
[0039]
四面体网格面f4的重心坐标为
[0040]
x8=(x1 x2 x3)/3,y8=(y1 y2 y3)/3,z8=(z1 z2 z3)/3
ꢀꢀ
(5)
[0041]
将重心坐标代入公式(1),得到四面体四个面f1,f2,f3,f4重心处的电场分别为重心处的电场分别为
[0042]
e.基于步骤d获得的四面体网格四个面的重心坐标以及重心处的电场,采用最小二乘法获得四面体网格上的电场重构一阶线性拟合表达式。
[0043]
四面体网格上的电场为矢量,且x,y,z各个方向分量值为复数,因此需要对x,y,z三个方向的分量及其实部和虚部总计6个分量分别进行一阶线性拟合,获得电场重构表达式。这6个分量的重构表达式构造方法一样,这里以x方向分量的实部f为例,进行详细说明。
[0044]
构造如下格式的一阶线性拟合表达式
[0045]
f=a bx cy dz
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0046]
其中a,b,c,d为待求系数,将四面体网格四个面f1,f2,f3,f4重心处的电场x方向分量的实部值以及重心坐标代入(6)式,得到表达式在四面体网格四个面的重心点的残差平方和为:
[0047][0048]
其中fi表示四面体网格四个面f1,f2,f3,f4重心处的电场x方向分量的实部值,s是拟合数据的残差平方和。
[0049]
令残差平方和s最小,即:
[0050][0051]
求解方程组(8),即可得到拟合表达式(6)的系数。
[0052]
f.基于四面体网格节点坐标和步骤e获得的电场重构一阶线性拟合表达式,计算得到四面体网格节点上的电场恢复解。
[0053]
根据拟合表达式(6)和四面体网格节点处的坐标,计算出节点1,2,3,4处的拟合电场(即恢复解)其中上标“*”表示电场是重构的,一般称其为恢复解。
[0054]
g.基于步骤f得到的电场恢复解进行后验误差估计,得到四面体网格加密指示,并对四面体网格进行加密,得到加密的四面体网格及其节点的坐标信息。
[0055]
根据(1)式计算出节点1,2,3,4处的电场结合恢复解结合恢复解得到第e个四面体网格后验误差范数||ξe||为
[0056][0057]
其中||表示取模值,ve为第e个四面体网格的体积,为节点1,2,3,4处恢复解在x,y,z三个方向上的分量,为节点1,2,3,4处电场在x,y,z三个方向上的分量。
[0058]
计算所有四面体网格的后验误差,采用网格加密策略进行网格加密判断,获得需要加密的四面体网格,并计算对应网格的加密指示。根据加密指示对网格进行加密,获得加密的四面体网格及其节点的坐标信息,这是一种公知过程,因此本步骤不再详细描述。
[0059]
h.重复步骤c至步骤g,直到有限元电磁仿真分析的计算结果满足精度要求。
[0060]
图4展示了本实施例自适应前后的网格的对比,结果表明本发明能够实现网格自适应加密。
[0061]
通过以上实施例可见,本发明首先获取单个四面体网格上的有限元解和四面体网格的坐标信息,再结合最小二乘法,即可实现单个四面体网格上恢复解的构造,无需额外的信息;且整个方法中以单个四面体为最小实施单元,因此不需要和其它四面体网格进行数据交互,信息相对集中,避免了在边界上需要特殊处理的问题,提高了普适性。本发明具有工程实现较简单,计算量小,以及普适性高的优点。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。