1.本发明属于光纤传感技术领域,具体涉及一种用于光纤光栅传感网络将分布式个体差分进化(dide)方法与四点定位(fpp)方法结合(dide-fpp)的复合空间定位方法。
背景技术:
2.光纤传感技术是利用光纤为媒介以光波为载体,感知和传输外界信号(待测量)的一种传感技术。由于光纤具有灵敏度高、轻巧、精度高、可弯曲、无源、抗电磁干扰和复用能力强等优点,广泛应用于军事、航天等领域。通过采用在线刻写超弱光纤光栅阵列能大大提升系统的复用能力及监测精度。但是,当超弱光栅阵列应用于隧道火灾监测系统时,由于隧道火灾定位过程中存在多峰值优化问题(mmops),难以精确定位,因此,解决多峰值优化问题可提高整个隧道火灾监测系统的定位精度。
3.当前国内外对于多峰值优化问题的分析研究在不断完善,从r.storn和k.v.price在1997年提出差分进化de(differential evolution)这种需要很少的控制变量、稳健、易于使用、并且非常适合并行计算的新方法以来,有大量的学者在de的基础上做了改进和提升。2004年,r.thomsen等人在de的基础上通过拥挤方案进行了扩展,使其能够跟踪和维护多个最优值,该算法被称为基于种群的差分进化cde(crowding differential evolution)方法。一年后(2005),x.li等人也在de的基础上提出基于物种的微分进化sde(species-based differential evolution)方法,能够通过在每个迭代步骤中在de种群中自适应形成多个物种(或亚群)来同时定位多个全局最优值,sde比cde的计算效率更高,但该方法仍无法应对复合函数。2020年,zong-gan chen等在前人基础上提出了dide算法。该算法通过自适应范围调整(ara)策略来控制虚拟种群的进化过程,通过生命周期机制解决了多峰优化问题(mmop)中的多样性问题,通过精英学习机制(elm)解决了多峰优化问题(mmop)中的准确性问题。四点定位(fpp)方法目前广泛应用于以人造地球卫星为基础的高精度无线电导航的定位系统,如全球定位系统(global positioning system,gps)等。它在全球任何地方以及近地空间都能够提供准确的地理位置、车行速度及精确的时间信息。
4.本发明针对上述方法存在的不足,运用dide与fpp相结合的方法,将超弱光栅阵列受外界温度环境变化影响并导致反射波波长的变化精准识别并进行三维空间定位,该算法针对高密度的光栅阵列所反射的密集波峰寻峰定位效果显著,其具体内容如下。
技术实现要素:
5.本发明的目的是提供一种用于光纤光栅传感网络的复合空间定位方法,通过构造一种复合定位算法来解决大容量光纤光栅传感网络的三维空间定位问题。
6.有鉴于此,本发明提供了一种基于dide-fpp复合空间定位算法,本发明提供的dide-fpp复合空间定位方法包括分布式个体差分进化方法(dide)与四点定位方法(fpp)。
7.本发明所述dide方法由四部分构成;fpp方法由距离计算,坐标解算两个步骤组成。
8.可选的,所述dide方法通过一种新的多峰分布式个体(dimp)框架来提高进化算法在解决mmop方面的性能;
9.可选的,所述dide方法通过自适应范围调整(ara)策略创建虚拟种群解决了de算法中变异过程无法应用于多峰式分布个体(dimp)框架的问题;
10.可选的,所述dide方法通过生命周期机制解决mmop中的峰值多样性问题;
11.可选的,所述dide方法应用精英学习机制(elm)提高峰值定位准确性,从而解决多峰值优化问题,提高整个隧道火灾监测系统的定位精度。
12.可选的,所述fpp方法距离计算步骤:在此步骤中将经dide算法寻到的峰值点按每组四个进行分组,因为超弱光栅阵列在制备后每个光栅传感器位置已经固定,可以轻松得知每个点对应隧道地面的距离。假设四个点分别为a、b、c、d,坐标分别为(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3)、(x4,y4,z4),它们到隧道地面的距离分别为ρ1、ρ2、ρ3、ρ4,根据距离公式,可以得到以下方程:
[0013][0014]
将所有组均进行上述操作;
[0015]
可选的,所述fpp方法坐标解算步骤:在此步骤中将距离计算阶段得到的方程简化,可以得到以下方程:
[0016][0017]
用矩阵形式表示方程:ac=b
[0018]
其中:
[0019][0020][0021][0022]
根据c=a-1
b,我们能够得到每一组定位的虚拟点,将其汇总并绘制三维图形,即完
成三维空间定位。
[0023]
本发明提供了上述技术方案所述应用于光纤光栅传感网络的dide-fpp复合空间定位方法的运行过程,包括以下步骤:
[0024]
本发明运用matlab仿真软件,以c波段作为输入信号(光源);
[0025]
添加可调节的温度变化;
[0026]
应用dide方法进行寻峰;
[0027]
将寻峰得到的峰值点编组;
[0028]
通过fpp方法进行三维空间定位。
[0029]
本发明提供的dide-fpp方法包括dide方法与fpp技术。本发明提供的dide-fpp先用dide方法进行寻峰,然后结合fpp技术,将寻峰点进一步进行三维空间定位。本发明不仅解决隧道火灾定位过程中存在的多峰值优化问题(mmops),并且通过对寻峰结果的进一步分析计算,实现了三维空间定位且达到厘米级定位精度。
附图说明
[0030]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0031]
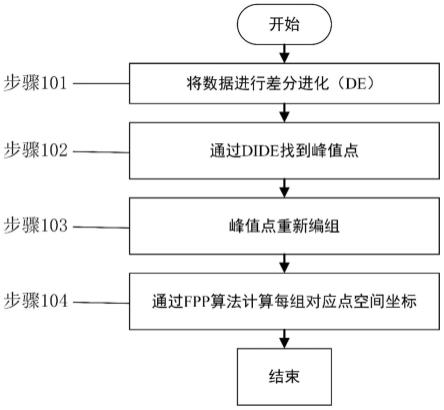
图1为dide-fpp复合算法流程图;
[0032]
图2为dide算法流程图;
[0033]
图3为ara策略运行流程图;
[0034]
图4为生命周期机制运行流程图;
[0035]
图5为精英学习机制elm运行流程图;
[0036]
图6中为dide-fpp与其他4种先进算法pr结果对比图;
[0037]
图7中为dide-fpp与其他4种先进算法sr结果对比图;
具体实施方式
[0038]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0039]
本发明的目的是提供一种用于光纤光栅传感网络的复合空间定位方法,通过创造一种复合空间定位方法来解决大容量光纤光栅传感网络寻峰环节中的多峰值优化问题。
[0040]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0041]
如图1所示,本发明提供了一种dide-fpp复合空间定位方法,具体包括:dide方法与fpp技术。
[0042]
本发明提供的dide-fpp方法由差分进化、寻峰优化、峰值编组及空间定位四部分构成,具体包括:
[0043]
步骤101:将光纤阵列反射的波形数据进行差分进化(de)
[0044]
在实际应用中,步骤101,具体包括:首先将光纤阵列反射的每个波形数据视为独立个体,并为每个独立个体创建它们各自的虚拟种群,随后开展变异操作,筛选出性能最好的个体来完成差分进化过程;
[0045]
步骤102:dide应用ara策略、生命周期机制和elm在dimp框架内优化差分进化的结果,完成寻峰过程,得到峰值点;
[0046]
步骤103:将峰值点重新编组准备坐标解算;
[0047]
步骤104:使用fpp方法将重新编组后的峰值点进行三维空间定位。
[0048]
如图2所示,本发明运用matlab仿真软件,以c波段作为输入信号,添加可调节的外部温度变化,应用dide方法进行寻峰操作,步骤如下:
[0049]
步骤1:将原始信号编号为特定个体x
α
,初始化x
α
及其对应的r,cg,ht;
[0050]
步骤2:为每个个体x
α
生成两个虚拟种群vx
α,1
,vx
α,2
,进行变异操作生成对应的虚拟个体v
α
,
[0051]vα
=x
α
f
×
(vx
α,1-vx
α,2
)
[0052][0053]
其中f为比例因子参数,l为搜索空间的上界,u为搜索空间的下界;
[0054]
步骤3:进行交叉操作,根据交叉率cr选择各个维度的信息,通过选择后将对应的x
α
和v
α
的值付给后代u
α
,
[0055]
其中rnbr
α
是个体x
α
的随机整数,范围在{1,2,...,d}中,其中d是优化问题的维度大小;
[0056]
步骤4:进行选择操作,通过选择在u
α
和x
α
之间具有更好适应度的那个个体来作为进化算法的下一代,同时更新每个个体对应的cg参数来辅助ara策略;
[0057]
步骤5:如图3所示,执行自适应范围调整(ara)策略,
[0058]
其中mcg=10
×2[d/10] 1
;
[0059]
步骤6:如图4所示,执行生命周期机制,
[0060]
其中mht为最大减半时间,rank为循环次数;
[0061]
步骤7:如图5所示,执行精英学习机制(elm),若满足终止条件,则输出寻峰结果;反之,返回步骤2继续操作直至满足终止条件并输出寻峰结果,
[0062]
其中b
α
=gaussian(a
α
,σ
α
),σ
α
为对应个体的标准差,number为停滞计数器,dt为下降阈值。
[0063]
本发明还提供了四点定位(fpp)技术的运行方案,由距离计算,坐标解算两个步骤组成。本发明提供的四点定位(fpp)技术,基于根据距离公式计算异常点坐标,并在构建坐标区间的同时实现三维空间定位。
[0064]
本发明中,所述fpp方法距离计算步骤为:在此步骤中将经dide算法寻到的峰值点按每组四个进行分组,因为超弱光栅阵列在制备后每个光栅传感器位置已经固定,可以轻松得知每个点对应隧道地面的距离。假设四个点分别为a、b、c、d,坐标分别为(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3)、(x4,y4,z4),它们到隧道地面的距离分别为ρ1、ρ2、ρ3、ρ4,根据距离公式,可以得到以下方程:
[0065][0066]
将所有组均进行上述操作;
[0067]
本发明中,所述fpp方法坐标解算步骤为:在此步骤中将距离计算阶段得到的方程简化,可以得到以下方程:
[0068][0069]
用矩阵形式表示方程:ac=b
[0070]
其中:
[0071][0072][0073][0074]
根据c=a-1
b,我们能够得到每一组定位的虚拟点,将其汇总并绘制三维图形,即完成三维空间定位。
[0075]
在实际测试中,为客观评价寻峰性能,使用峰值比率(pr)和成功率(sr)作为评价指标,设置对比例实验,验证dide-fpp方法的去噪效果。寻峰指标采用pr和sr,
[0076][0077]
其中pr表示在多次运行中发现的全局峰值的平均百分比,其中nr是运行次数,npf
α
是运行中发现的全局峰值的数量,tnp是优化问题中全局峰值的总数。sr表示多次运行中成功运行的百分比,其中nsr是总nr运行中成功运行的数量(成功运行是找到所有全局峰值的运行)。
[0078]
对比例
[0079]
验证dide-fpp算法的寻峰性能,分别使用cde、sde、ncde、nsde与dide-fpp寻峰方法,比较在cec’2013基准集中的20种函数上的寻峰效果。
[0080]
cde通过种群方案拓展了差分进化算法在跟踪多个峰值时的性能。sde通过在de种群中自适应形成多个物种(或亚群)来同时定位多个全局最优值。具有邻域变异的种群差分进化ncde(neighborhood based crowding differential evolution)方法是在cde的基础上添加了邻域变异技术。具有邻域变异的物种差分进化nsde(neighborhood based speciation differential evolution)方法是在sde的基础上添加了邻域变异技术。dide-fpp复合方法是在de的基础上添加分布式个体进化方案并结合四点定位技术。
[0081]
在实际测试中,本发明设定dide运行参数为:比例因子f和交叉率cr分别设置为0.3和0.9;在生命周期机制中,最大减半时间mht为10;在elm中,下降阈值dt为40,而σ
β
与σ
min
分别为1.0e-04和1.0e-10。先以下表1中的20种函数作为输入信号;随后将dide-fpp、cde、sde、ncde与nsde分别在这20种函数上运行50次;将50次寻峰结果取平均值并整理为pr值与sr值;完成寻峰性能对比。
[0082]
表1 cec’2013基准集中的20种函数
[0083] 函数名称局部最优解全局最优解数据维度1five-uneven-peak trap3212equal maxima0513uneven decreasing maxima4114himmelblau0425six-hump camel back2226shubert with 2d许多1827vincent with 2d03628shubert with 3d许多8139vincent with 3d0216310modified rastrigin012211composition function 1 with 2d许多6212composition function 2 with 2d许多8213composition function 3 with 2d许多6214composition function 3 with 3d许多6315composition function 4 with 3d许多8316composition function 3 with 5d许多6517composition function 4 with 5d许多8518composition function 3 with 10d许多61019composition function 4 with 10d许多81020composition function 4 with 20d许多820
[0084]
在实际测试中,通过应用不同的组合方法得出的寻峰效果,即峰值比率(pr)如图6所示。所述cde、sde、ncde、nsde与dide-fpp模型都可以完成低维度的寻峰操作,但是dide-fpp模型在高纬度的函数下峰值比率更高,即寻峰效果优于其他模型。
[0085]
本发明通过应用不同的组合方法得出的寻峰效果,即成功率(sr)如图7所示。dide-fpp综合在20种函数上的sr显著高于其他模型,即综合寻峰效果优于其他模型。
[0086]
在实际测试中,dide-fpp方法在cec’2013基准集中的20种函数上综合运行结果最
好,在五种方法中获得了最高的峰值比率(pr)与最高的成功率(sr)。证明dide-fpp模型的寻峰效果最好。
[0087]
本发明将分布式个体差分进化方法(dide)与四点定位方法(fpp)结合起来,提出了一种可用于光纤光栅传感网络寻峰的dide-fpp方法,该方法可自适应处理c波段的超弱光纤光栅反射光谱,与cde、sde等模型比较,能更精确的进行寻峰,寻得更多的峰值点。
[0088]
本发明中应用具体个例对本发明的原理及实施方式进行了阐述,以上实施例及对比例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。