技术特征:
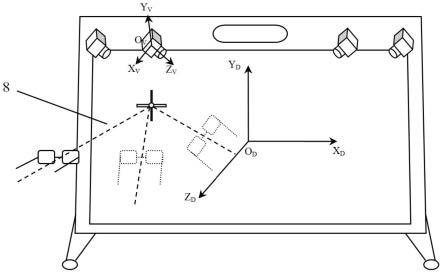
1.一种虚拟现实设备中定位相机安装参数的自标定方法,其特征在于步骤如下:步骤1:建立显示器坐标系o
d-x
d
y
d
z
d
,以显示器中心为坐标中心o
d
,显示器平面为x
d
y
d
,垂直于显示器平面的坐标为z
d
;建立视觉系统坐标系o
v-xvyvzv,以定位相机的中心为坐标中心ov,定位相机镜头平面为x
d
y
d
,垂直于镜头平面为的坐标为zv;步骤2:以显示器平面上的任一点作为标志点,该点在显示器坐标系下的坐标为(x
d0
,y
d0
,z
d0
);步骤3:以3d眼镜的视轴方向或者操纵交互笔的笔轴方向,对准显示器上的标志点;步骤4:利用视觉定位组件对眼镜的视轴线或交互笔轴线得到视觉系统坐标系o
v-xvyvzv下轴线的参数方程,并对位姿参数进行求解,步骤5:改变3d眼镜或交互笔位置,重复步骤3-4,求解并记录至少10组轴线位姿参数;步骤6:利用最优化方法求取所有轴线的交点坐标,即标志点在定位相机坐标系下的坐标;步骤7:改变n次显示器上标志点的显示位置,重复n次步骤2~步骤6,得到多个标志点在显示器坐标系及定位相机坐标系下的坐标,根据立体解析几何理论,完成显示器坐标系和定位相机坐标系间位姿关系矩阵,即定位相机的安装参数。2.根据权利要求1所述虚拟现实设备中定位相机安装参数的自标定方法,其特征在于:所述步骤4的视觉系统坐标系o
v-xvyvzv下轴线的参数方程是:下轴线的参数方程是:p
i
、q
i
、r
i
为参数方程的系数。3.根据权利要求1所述虚拟现实设备中定位相机安装参数的自标定方法,其特征在于:所述步骤6标志点在定位相机坐标系下的坐标(x
v0
,y
v0
,z
v0
)的计算:建立以交点到所有轴线的距离和建立目标函数:其中利用l-m或其他最优化算法对(x
v0
,y
v0
,z
v0
)进行最优化求解。4.根据权利要求1所述虚拟现实设备中定位相机安装参数的自标定方法,其特征在于:所述步骤7得到定位相机的安装参数的计算:显示器坐标系和定位相机坐标系间位姿关系矩阵为[r
vd
|t
vd
],其中,r
vd
为3
×
3矩阵,为两坐标系的旋转关系,t
vd
为3
×
1向量,为两坐标系的平移关系;将多个标志点在显示器坐标系下的坐标值(x
di
,y
di
,z
di
),及其对应在定位相机坐标系下的坐标值(x
vi
,y
vi
,z
vi
)代入[x
vi
,y
vi
,z
vi
]
t
=r
vd
[x
di
,y
di
,z
di
]
t
t
vd
,利用最优化算法,即求解出定位相机和显示器坐标系间的位姿关系矩阵,即定位相机的安装参数。5.根据权利要求1所述虚拟现实设备中定位相机安装参数的自标定方法,其特征在于:所述n次n≥3。6.根据权利要求1所述虚拟现实设备中定位相机安装参数的自标定方法,其特征在于:所述m大于10。
技术总结
本发明涉及一种虚拟现实设备中定位相机安装参数的自标定方法,利用系统中3D显示器、3D眼镜或交互笔、视觉定位组件,无需借助外部标定设备,即可实现定位相机在系统中安装参数的标定。首先,在显示器上显示标志点并记录坐标位置,然后,基于视觉测量原理求解出该标志点在定位相机坐标系下的坐标,根据至少3组空间点在显示器坐标系和相机坐标系下的对应关系,即可实现定位相机在系统中安装参数的标定。该标定方法环境搭建便捷,无需专业人员及专业设备的协助,操作步骤简单,标定精度满足应用需求,增强了桌面级虚拟现实系统的实用性和可维护性。和可维护性。和可维护性。
技术研发人员:沈晶晶 宋宣晓 杨冉
受保护的技术使用者:中国航空工业集团公司洛阳电光设备研究所
技术研发日:2022.07.22
技术公布日:2022/11/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。