1.本发明涉及一种电机及其智能化控制技术领域,尤其涉及一种基于主动式无位置传感器策略的永磁容错轮毂电机及其驱动、设计方法。
背景技术:
2.气候变化是当今世界面临的最严峻的挑战之一,控制以二氧化碳为主体的温室气体排放迫在眉睫。新能源电动汽车因其污染小,成为节能减排的重要手段。永磁轮毂电机因其高输出转矩、高效率、小体积等优势在新能源汽车领域得到广泛关注。
3.新一代新能源电动汽车对其电机驱动系统安全性和可靠性提出更高要求。永磁容错轮毂电机能够克服功率开关故障、开路故障和短路故障,具备良好的容错能力,有效提高了轮毂电机的可靠性。中国发明专利《一种电热磁隔离多相容错电机》(专利号cn112510862a)公开了一种电热磁隔离多相容错电机,利用多相集中绕组技术和一种新型的定子结构,实现了故障工况下电机的强容错运行。然而,此类容错电机由于采用集中绕组,凸极率往往比较低,导致电机调速范围窄,无位置传感器运行效果差等缺点,无法满足电动汽车对其驱动电机的要求。为克服电机凸极率较低的问题,中国发明专利《一种高磁阻转矩、高凸极率的五相永磁容错电机的设计方法》(专利号cn111654124b)针对五相永磁容错电机,提出了一种改进的槽极配合关系,在实现高磁阻转矩和高凸极率的同时,能保证优越的容错性能,对获得良好的容错能力和稳态无位置传感器运行性能具有重要意义。然而,该类永磁容错电机由于凸极率大于1,导致电机在高速弱磁下的永磁体不可逆退磁风险较高;并且,该类电机的凸极特性随负载变化极易消失,从而恶化了无位置传感器动态运行性能。为此,文献“design and analysis of new five-phase flux-intensifying fault-tolerant interior-permanent-magnet motor for sensorless operation”(ieee transactions on industrial electronics,2020)尝试提出一种磁场增强型永磁电机,以提高电机的无位置传感器运行能力。但是,该类电机的反凸极率不明显,同时未克服次级凸极性问题,动稳态下转子位置估算精度仍有待进一步提高。因此,为满足新一代电动汽车对良好的多工况无位置传感器运行性能的需求,如何在保证轮毂电机基本电磁性能的同时提高其无位置运行能力、抗退磁能力及调速范围尤为重要。
技术实现要素:
4.发明目的:本发明针对现有技术中存在的问题,提出一种基于主动式无位置传感器策略的永磁容错轮毂电机及其驱动、设计方法,将无位置运行能力提前考虑到设计阶段,综合考虑电机参数对无位置传感器运行性能的影响,以满足电动汽车的“频繁启停、加减速、重载爬坡、高速巡航、故障”等多变工况需求。在满足“强容错”及“宽调速”的基础上,使得电机具有较好的无位置运行能力,进一步拓宽电动汽车电机驱动系统的广域高效区和提高安全可靠运行性能。
5.技术方案:为实现上述发明目的,本发明提供了一种基于主动式无位置传感器策略的永磁容错轮毂电机驱动系统。包括:五相永磁容错轮毂电机(1)、park变换模块(2)、无位置传感器控制模块(3)、mtpa控制模块(4)、pi控制器(5)、反park变换模块(6)、svpwm模块(7)及逆变器模块(8)。具体包括以下步骤:
6.步骤1),设计一种基于主动式无位置传感器策略的永磁容错轮毂电机,通过在设计阶段统筹考虑无位置运行性能,以获取良好的无位置运行性能及容错性能。
7.步骤2),为充分发挥所述步骤1)中永磁容错轮毂电机优越的无位置传感器运行性能,提出基于频带自适应的次级谐波抑制与位置误差信号提取算法,抑制次级凸极谐波对位置观测的影响,提升无位置传感器控制的动态响应性能。
8.步骤3),基于所述步骤1)中新型主动式无位置传感器策略的永磁容错轮毂电机和步骤2)中无位置传感器控制方法,构建五相永磁容错轮毂电机无位置传感器驱动控制系统。
9.进一步,所述步骤1)中,一种基于主动式无位置传感器策略的永磁容错轮毂电机,其特征在于:由内向外依次包括转轴(11)、定子(9)、转子(10)。所述定子(9)由定子轭(22)、电枢齿(14)、定子槽(21)、容错齿(13)组成;沿定子(9)外圆周方向间隔均匀分布电枢齿(14)和容错齿(13),所述电枢齿(14)上绕有电枢绕组(12),两相邻的电枢绕(14)组之间由容错齿(13)进行隔离;沿转子(10)内圆周方向间隔均匀分布主永磁体(15)与铁芯极(16),所述主永磁体(15)采用表嵌式弧形永磁体,表嵌式永磁磁极与相邻铁芯极(16)形成一对磁极;所述表嵌式永磁磁极与铁芯极(16)之间靠近气隙侧存在q轴磁障(17),q轴磁障(17)与定子(9)外圆形成非均匀气隙;所述表嵌式永磁磁极与铁芯极(16)之间靠近外圆侧存在多层弧形磁障(19),各层弧形磁障之间形成导磁桥(20);所述q轴磁障(17)与靠近气隙的弧形磁障之间设置有矩形辅助永磁体(18),辅助永磁体(18)与主永磁体(15)之间形成串联。
10.所述定子(9)和转子(10)均采用硅钢片等导磁材料叠压而成,叠压系数为0.96;电枢绕组(12)采用漆包铜导体材料。
11.所述电枢绕组(12)为单层集中绕组。
12.所述定子齿的齿数是2m的倍数,且定子齿的数量与转子极数之差为2,其中m为电机的相数。
13.所述永磁磁极与铁芯极(16)的数量之和为ps。
14.所述转子极数为ps、所述主永磁体(15)极数为pm、所述辅助永磁体(18)极数为pa、所述铁芯极(16)极数为pf,四者之间满足关系:pm pf=ps=pa。
15.设计多层弧形磁障(19)位于主永磁体(15)磁极与铁芯极(16)间,沿转子(10)圆周方向均匀分布;辅助永磁体(18)位于多层弧形磁障(19)与q轴磁障(17)之间沿转子(10)外圆周方向均匀分布。
16.所述q轴磁障(17)圆心为o1,半径为r1,所述多层弧形磁障(19)圆心为o2,弧形磁障半径分别为r2,r3,弧形磁障厚度为h0。
17.所述主永磁体(15)与辅助永磁体(18)的均采用钕铁硼永磁磁钢,主永磁体(15)充磁方向均为指向圆心,辅助永磁体(18)充磁方向沿圆周方向,相邻两个辅助永磁体(18)充磁方向相反使得辅助磁场与主磁场形成磁路串联。
18.本发明提供的一种基于主动式无位置传感器策略的永磁容错轮毂电机,其具体设
计方法如下:
19.步骤1.1)利用传统容错电机的槽极配合设计方法,初步确定定子(9)齿数和转子(10)极对数,基于基波合成矢量最大原则,确定槽矢量分配。
20.步骤1.2)设置交替表嵌式主永磁磁极,主永磁磁极充磁方向均指向气隙,与铁芯极共同形成闭合磁路,有利于提高永磁体利用率。
21.步骤1.3)在主永磁磁极与铁芯极(16)之间设置q轴磁障(17)与多层弧形磁障(19),增加交轴磁阻,从而实现电机的反凸极特性。
22.步骤1.4)在q轴磁障(17)与多层弧形磁障(19)之间设置沿周向充磁的矩形辅助永磁体(18),使其在提供辅助磁场的同时增加交轴磁阻,以降低交轴电感,进一步增加电机的反凸极效应。
23.步骤1.5)对主永磁体(15)、辅助永磁体(18)、q轴磁障(17)、多层弧形磁障(19)参数进行优化,获得良好的反凸极特性,通过在电机设计阶段提前考虑无位置传感器运行性能,以实现主动式无位置传感器运行永磁容错轮毂电机的设计。
24.通过主动式无位置传感器运行永磁容错轮毂电机的设计,可以有效提高电机的无位置传感器运行能力,但是仍然存在次级凸极问题,未能充分发挥电机驱动系统的高精度无位置传感器运行性能。为充分实现所述永磁容错轮毂电机优越的无位置传感器运行性能,本发明还提供了一种基于频带自适应的次级谐波抑制与信号提取的无位置传感器控制算法。
25.进一步,所述步骤2)中,基于频带自适应的次级谐波抑制与信号提取的无位置传感器控制算法实现的具体步骤如下:
26.2.1)通过基于频带自适应的次级谐波抑制算法,以抑制次级凸极谐波对位置观测的影响。
27.采用基于递归最小二乘法的自适应线性神经元滤波器,通过自适应算法对滤波器系数进行自整定以抑制位置误差信号中的特定次谐波。对谐波参考信号r(n)和可调权重分量x(k)进行处理后获取滤波器期望输出信号y(n),将输入信号u(n)和滤波器期望输出信号y(n)做差便可获得期望基波信号y(n)。由递归最小二乘法可得公式:
[0028][0029]
式中,y1(n)为谐波估计量;x
11
(n-1)、x
21
(n-1)为谐波分量估计幅值;1)为谐波分量估计幅值;为谐波参考信号,为估计转子位置;y(n)为滤波输出;u(n)为滤波输入;可调滤波系数x
11
(n)和x
21
(n)基于谐波参考信号在线更新,表达式如下:
[0030][0031]
其中,增益系数k
11
(n)和k
21
(n)表示为:
[0032][0033]
式中,μ为遗忘因子,且0《μ《1。其中,自相关矩阵h1(n)的逆被转换成两个尺度h
11
(n)和h
21
(n),使递归最小二乘法算法的实现更加简单和迅速,h
11
(n)和h
21
(n)可以表示为:
[0034][0035]
2.2)在所述步骤2.1)的基础上,结合基于频带自适应的位置误差信号提取算法,提高五相永磁容错轮毂电机无位置传感器控制的动态响应性能。
[0036]
利用全通网络滤波器只改变信号相位的特性,将滤波前后的信号进行线性运算,构造自适应频带带通滤波器与自适应频带陷波滤波器。典型二阶全通网络滤波器的传递函数为:
[0037][0038]
式中,为滤波带宽相关系数,ωm为具有3db衰减的滤波带宽,ts为数字采样周期;p=cos(ωnts),为滤波频率相关系数,ωn为谐振频率点;自适应频带滤波器中谐振频率设为:
[0039][0040]
式中,ωc为注入高频信号频率,为电机估计转速,谐振频率跟随电机转速自动调节,以减小滤波器带来的相位延迟。将滤波带宽设为:
[0041][0042]
其中,ωb为可调带宽,λ为动态调节因子,ω
*
为给定转速,当电机稳定运行时,动态调节因子不起作用,此时滤波器带宽取决于ωb;当电机处于变速运行时,动态调节因子重新作用,根据实际转速与给定转速误差大小自适应调节滤波带宽,以此来改善无位置控制动态响应性能,调制后的电流可表示为:
[0043][0044]
式中,为q1轴高频响应电流;ωh为注入高频信号角频率,为2次高频注入谐波幅值;为位置误差函数,为估计角位置误差;调制后的电流包含2次高频注入谐波,故将自适应频带陷波滤波器中ωc设为2ωh,以获取位置误差信号
[0045]
进一步,所述步骤3)中,基于主动式无位置传感器策略的五相永磁容错轮毂电机驱动系统,其特征在于:
[0046]
五相永磁容错轮毂电机(1)作为系统的驱动电机模块,输出电磁转矩te和五相电流i
abcde
;
[0047]
五相电流i
abcde
通过所述park变换模块(2)获取反馈交直轴电流信号i
d1q1d3q3
;
[0048]
基于频带自适应的次级谐波抑制与位置误差信号提取算法的无位置传感器控制模块(3),通过反馈电流信号i
q1
,估测转子位置及转速信息;
[0049]
基于公式法的mtpa模块(4),将给定转速n与估计转速的差值通过pi控制器(5)
输出的给定转矩进行最优分配,获取最优交直轴给定电流
[0050]
pi控制器(5)用于调节给定电流与反馈电流i
d1q1d3q3
的偏差,获取给定交直轴电压信号u
d1q1d3q3
;
[0051]
反park变换模块(6)用于反变换给定交直轴电压信号u
d1q1d3q3
,获取静止坐标系下的电压信号u
α1β1α3β3
;
[0052]
svpwm模块(7)用于将给定两相静止坐标系下的电压信号u
α1β1α3β3
调制成驱动电机所需的十路pwm脉冲信号;
[0053]
逆变器模块(8)通过十路pwm脉冲信号输出五相电压信,给所述五相永磁容错轮毂电机(1)提供电源。
[0054]
本发明的有益效果:
[0055]
(1)本发明首次从电机设计和控制的角度,统筹考虑电机驱动系统的无位置传感器运行性能,提出一种基于主动式无位置传感器策略的永磁容错轮毂电机驱动系统。将无位置运行性能提前考虑到电机设计阶段,提出基于主动式无位置传感策略的永磁容错轮毂电机,以提高电机无位置传感器控制时动稳态下的转子估算精度,简化电机控制算法的复杂程度。与此同时,针对此类永磁容错轮毂电机,提出相应的无位置传感器控制算法,实现转子位置的高精度检测,以应对复杂多变的运行工况。
[0056]
(2)本发明通过相数冗余增加电机故障容错能力,同时采用分数槽集中绕组,使得电机不同相间可以通过容错齿实现相间磁隔离,降低不同相间磁路耦合,在很大程度上提高了电机的可靠性。与传统电机设计不同,本发明考虑到无位置传感器控制层对转子位置高精度检测的需求,通过在转子上巧妙地设置“交替极”、“多层磁障”以及“q轴磁障”,在减少永磁体用量的同时,使得电机具有较好的反凸极特性,创造性地从电机设计角度提高了无位置传感器运行精度。
[0057]
(3)为进一步提高转矩输出能力和反凸极率,本发明电机巧妙地在转子上合理增设辅助永磁体,该辅助永磁体位置q轴磁路上,辅助永磁体充磁方向沿圆周方向,与主永磁体在磁路上形成串联,可以一定程度上提高电机的转矩输出能力。此外。由于永磁体磁导率与硅钢片磁导率差别较大,因此位于q轴磁路上的辅助永磁体一方面充当辅助磁源的作用,另一方面可以增加q轴磁阻,在提高转矩输出能力的基础上进一步提高电机的反凸极率,从而确保了电机高转矩输出的同时,具备优越的无位置传感器运行能力。
[0058]
(4)从电机驱动控制角度,本发明提出了自适应次级谐波抑制策略,以抑制次级凸极引起的谐波,提升转子位置的观测精度。并且,为进一步提高无位置传感器控制的动态响应性能,本发明提出基于全通网络的自适应频带滤波器代替固定带宽滤波器,进行转子位置误差信号提取。所提出的控制算法能够充分发挥所提电机结构的多工况下良好的无位置传感器运行性能。
[0059]
(5)本发明从电机设计和控制角度,综合提高了电机无位置运行精度,为现代无位置控制理论提供了新的思路,有利于促进轮毂电机无位置控制理论的发展,对电动汽车的发展具有重大的工程应用价值。
附图说明
[0060]
图1为本发明基于主动式无位置传感器策略的永磁容错轮毂电机驱动系统框图;
[0061]
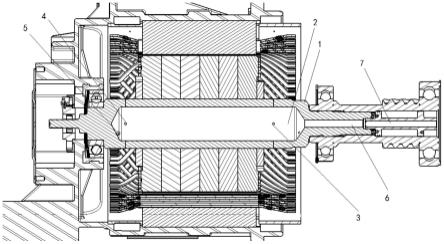
图2为本发明满足主动式无位置传感器策略的永磁容错轮毂电机结构示意图;
[0062]
图3为图1中定子结构示意图及电枢绕组分布图;
[0063]
图4为图1中转子局部结构及几何尺寸标注放大示意图;
[0064]
图5为图1中转子上的钕铁硼永磁体的充磁示意图;
[0065]
图6为图1中转子的直轴、交轴示意图;
[0066]
图7为本发明提供的一种主动式无位置传感器策略的永磁容错轮毂电机的设计方法结构框图;
[0067]
图8为本发明电机反电势波形;
[0068]
图9为本发明电机电感波形;
[0069]
图10为本发明电机负载时d、q轴电感波形;
[0070]
图11为本发明电机转子位置误差角随q轴电流变化关系图;
[0071]
图12为本发明无位置传感器控制模块简化框图;
[0072]
图13为本发明自适应线性神经元滤波器原理框图;
[0073]
图14为本发明自适应频带滤波原理框图;
[0074]
图中:1、五相永磁容错轮毂电机;2、park变换模块;3、无位置传感器控制模块;4、mtpa控制模块;5、pi模块;6、反park变换模块;7、svpwm模块;8、逆变器模块。9、定子;10、转子;11、转轴;12、电枢绕组;13、容错齿;14、电枢齿;15、主永磁体;16、铁芯极;17、q轴磁障;18、辅助永磁体;19、多层弧形磁障;20、导磁桥;21、定子槽;22、定子轭。
具体实施方式
[0075]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。
[0076]
图1所示为本发明零低速下新型主动式无位置传感器策略的永磁容错轮毂电机驱动系统结构框图。其中所述五相永磁容错轮毂电机(1)作为系统的驱动电机;所述park变换模块(2)和反park变换模块(6)用于解耦自然坐标系下的数学模型;所述无位置传感器控制模块(3)用于估测转子位置及转速信息;基于公式法的mtpa控制模块(4),采用和交直轴参考电流计算公式,以分配给定转矩下的最优交直轴电流式中ψf、is、l
d1
和l
q1
分别为永磁磁链、定子电流幅值、直轴电感和交轴电感;pi控制器(5)用于调节电流给定值与反馈值的偏差,获得给定电压控制信号;svpwm模块(7)用于将给定两相静止坐标系下的电压信号调制成所需pwm信号;逆变器模块(8)用于输出五相交流信号,给所述五相永磁容错轮毂电机(1)提供电源。
[0077]
如图2所示,本发明提出了主动式无位置传感器策略的永磁容错轮毂电机,该电机采用传统容错电机槽极组合方案,针对五相电机选取了20槽/18极槽极组合方式。由内向外依次包括转轴(11)、定子(9)、转子(10)。所述定子(9)由定子轭(22)、电枢齿(14)、定子槽
(21)、容错齿(13)组成;沿定子(9)外圆周方向间隔均匀分布电枢齿(14)和容错齿(13),所述电枢齿(14)上绕有电枢绕组(12),两相邻的电枢绕(14)组之间由容错齿(13)进行隔离;沿转子(10)内圆周方向间隔均匀分布主永磁体(15)与铁芯极(16),所述主永磁体(15)采用表嵌式弧形永磁体,表嵌式永磁磁极与相邻铁芯极(16)形成一对磁极;所述表嵌式永磁磁极与铁芯极(16)之间靠近气隙侧存在q轴磁障(17),q轴磁障(17)与定子(9)外圆形成非均匀气隙;所述表嵌式永磁磁极与铁芯极(16)之间靠近外圆侧存在多层弧形磁障(19),各层弧形磁障之间形成导磁桥(20);所述q轴磁障(17)与靠近气隙的弧形磁障之间设置有矩形辅助永磁体(18),辅助永磁体(18)与主永磁体(15)之间形成串联。定子(9)和转子(10)均采用硅钢片等导磁材料叠压而成,叠压系数为0.96;电枢绕组(12)采用漆包铜导体材料。
[0078]
图3为定子(9)结构示意图及电枢绕组(12)分布图,定子(9)槽数为20,采用半闭口平底槽。电枢绕组(12)绕制于电枢齿(14)上,采用单层集中绕组,电枢绕组(12)按图2中标注的顺序,“ ”为绕组进线方向,
“‑”
为绕组出线方向,电枢绕组(12)之间由容错齿(13)进行隔离。
[0079]
图4为图1中转子(10)局部结构及几何尺寸标注放大示意图,转子(10)内径和外径分别为ri和ro,在转子(10)内圈交替分布表嵌式弧形主永磁体(15),主永磁体(15)与铁芯极(16)形成一对磁极。在主永磁体(15)与铁芯极(16)之间靠近内圈侧存在圆心为o1,半径为r1的q轴磁障(17),形成q轴磁障(17);在主永磁体(15)与铁芯极(16)之间靠近外圈侧存在半径为o2,半径分别为r2和r3的多层弧形磁障(19),弧形磁障厚度为h0,有效增加了q轴磁阻;多层弧形磁障(19)之间存在导磁桥(20),减少对d轴磁通的影响;在靠近气隙侧弧形磁障与q轴磁障(17)之间存在矩形辅助永磁体(18),由于永磁体磁导率较低,在提供辅助磁场的同时充当了q轴磁障(17),可以在提高转矩的同时增加反凸极效应。
[0080]
图5为图3转子(10)上的钕铁硼永磁体的充磁示意图,位于转子(10)内圈的交替表嵌式主永磁体(15)充磁方向均指向圆心,与旁边的铁芯极(16)形成一对磁极;位于主永磁体(15)两侧的辅助永磁体(18)沿圆周方向反向充磁,与主永磁体(15)形成磁路串联。
[0081]
图6为图1中转子(10)的直轴,交轴示意图,主永磁体(15)磁极中心线为直轴方向,主永磁体(15)与铁芯极(16)之间的中心线为交轴,直轴与交轴互差90电角度。与电机交轴对应的电感称为交轴电感,与电机直轴对应的电感称为直轴电感。
[0082]
图7为本发明提供的一种主动式无位置传感器策略的永磁容错轮毂电机的设计方法,具体步骤如下:
[0083]
步骤1.1)利用传统容错电机的槽极配合设计方法,初步确定定子(9)齿数和转子(10)极对数,基于基波合成矢量最大原则,确定槽矢量分配。
[0084]
步骤1.2)设置交替表嵌式主永磁磁极,主永磁磁极充磁方向均指向气隙,与铁芯极共同形成闭合磁路,有利于提高永磁体利用率。
[0085]
步骤1.3)在主永磁磁极与铁芯极(16)之间设置q轴磁障(17)与多层弧形磁障(19),增加交轴磁阻,从而实现电机的反凸极特性。
[0086]
步骤1.4)在q轴磁障(17)与多层弧形磁障(19)之间设置沿周向充磁的矩形辅助永磁体(18),使其在提供辅助磁场的同时增加交轴磁阻,以降低交轴电感,进一步增加电机的反凸极效应。
[0087]
步骤1.5)对主永磁体(15)、辅助永磁体(18)、q轴磁障(17)、多层弧形磁障(19)参
数进行优化,获得良好的反凸极特性,通过在电机设计阶段提前考虑无位置传感器运行性能,以实现主动式无位置传感器运行永磁容错轮毂电机的设计。
[0088]
图8为本发明电机反电势波形,其反电势最大值约为78v,其谐波畸变率为2.3%,电机反电势具有较好的正弦度,有利于相应的驱动控制,同时可降低电机的齿槽转矩。
[0089]
图9为本电机电感波形,电机的自感较高,而互感成分较低,互感在自感中的占比为2.8%,有一定的短路电流抑制能力。相与相之间的磁耦合小,可以实现相间磁隔离,提高了电机的容错性能。
[0090]
图10为本发明电机负载时d、q轴电感波形,电机的d轴电感大于q轴电感,d轴电感与q轴电感比值约为1.3,具有较好的反凸极特性,有利于电机零低速无位置运行,同时降低高速弱磁时的永磁体不可逆退磁的风险,提升高速巡航时的可靠性。
[0091]
图11为本发明电机转子位置误差角随q轴电流变化关系图,当电机q轴电流发生变化时,电机的转子位置误差角变化幅度较小,具有较高的稳定性,可以有效提高电机无位置控制精度。
[0092]
图12为无位置传感器控制模块简化框图,基于频带自适应的次级谐波抑制与位置误差信号提取算法包括,自适应频带滤波器与自适应线性神经元滤波器。
[0093]
图13为本发明基于递归最小二乘法的自适应线性神经元滤波器原理框图,通过自适应算法对滤波器系数进行自整定以抑制位置误差信号中的特定次谐波。对谐波参考信号r(n)和可调权重分量x(k)进行处理后获取滤波器期望输出信号y(n),将输入信号u(n)和滤波器期望输出信号y(n)做差便可获得期望基波信号y(n)。由递归最小二乘法可得公式:
[0094][0095]
式中,y1(n)为谐波估计量;x
11
(n-1)、x
21
(n-1)为谐波分量估计幅值;1)为谐波分量估计幅值;为谐波参考信号,为估计转子位置;y(n)为滤波输出;u(n)为滤波输入;可调滤波系数x
11
(n)和x
21
(n)基于谐波参考信号在线更新,表达式如下:
[0096][0097]
其中,增益系数k
11
(n)和k
21
(n)表示为:
[0098][0099]
式中,μ为遗忘因子,且0《μ《1。其中自相关矩阵h1(n)的逆被转换成两个尺度h
11
(n)和h
21
(n),使递归最小二乘法算法的实现更加简单和迅速,h
11
(n)和h
21
(n)可以表示为:
[0100][0101]
图14为本发明自适应频带滤波原理框图。利用全通网络滤波器只改变信号相位的特性,将滤波前后的信号进行线性运算,构造自适应频带带通滤波器与自适应频带陷波滤
波器。典型二阶全通网络滤波器的传递函数为:
[0102][0103]
式中,为滤波带宽相关系数,ωm为具有3db衰减的滤波带宽,ts为数字采样周期;p=cos(ωnts),为滤波频率相关系数,ωn为谐振频率点;自适应频带滤波器中谐振频率设为:
[0104][0105]
式中,ωc为注入高频信号频率,为电机估计转速,谐振频率跟随电机转速自动调节,以减小滤波器带来的相位延迟。将滤波带宽设为:
[0106][0107]
其中,ωb为可调带宽,λ为动态调节因子,ω
*
为给定转速,当电机稳定运行时,动态调节因子不起作用,此时滤波器带宽取决于ωb;当电机处于变速运行时,动态调节因子重新作用,根据实际转速与给定转速误差大小自适应调节滤波带宽,以此来改善无位置控制动态响应性能,调制后的电流可表示为:
[0108][0109]
式中,为q1轴高频响应电流;ωh为注入高频信号角频率,为2次高频注入谐波幅值;为位置误差函数,为估计角位置误差;调制后的电流包含2次高频注入谐波,故将自适应频带陷波滤波器中ωc设为2ωh,以获取位置误差信号
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。