1.本公开属于仿章鱼粘附技术领域,具体涉及一种粘附-脱附装置。
背景技术:
2.离子聚合物-金属复合材料(ionic polymer-mental composite,ipmc)是由离子聚合物基体材料(如nafion膜、flemion膜、selemion膜)和表面贵金属电极层(如铂、银)组成,是近二十年来研究较广泛的一种典型新型柔性智能材料,具有柔韧性好、质量轻、驱动电压小、变形大、响应快速等特点,当给ipmc材料施加5v以下电压时,ipmc会随着外加电场的大小产生不同程度的变形。ipmc可用于控制微小形变,在人工肌肉、传感器、微制动器件等方面有广泛的应用前景。
3.章鱼在运动过程中,主要通过肌肉控制吸盘腔室产生的压差实现粘脱,近年来,许多团队基于章鱼启发制备了许多仿章鱼的粘附垫,在光滑平面上实现了高粘附力,但目前制备的粘附垫多为整片式的微结构层,微结构层上的所有粘附单元因受单一控制源控制而同步实现粘附和脱附,因此在具有大曲率的表面上(航空发动机内部表面有各种曲面,甚至是垂直表面)呈现较差的粘附性,这导致机器人难以在发动机内部移动。因此迫切需要研制出一种具有粘脱快速可控且具有曲面适应性的粘附垫,为机器人实现更加广泛的应用场景提供支撑。
技术实现要素:
4.针对现有技术中的不足,本公开的目的在于提供一种粘附-脱附装置,该装置中的每组粘附-脱附模块可被视作独立的粘附垫,每组粘附-脱附模块受独立电源控制以实现粘脱附,互不干扰,从而可以在各种曲率的表面(甚至是垂直表面)上移动,拓宽了粘附垫的应用场景。
5.为实现上述目的,本公开提供以下技术方案:
6.一种粘附-脱附装置,包括:
7.装置主体,所述装置主体包括多组粘附-脱附模块,每组粘附-脱附模块在控制电源所施加的电激励作用下发生变形以独立实现与接触物的粘附和脱附。
8.优选的,所述装置主体内设置有多个激励模块。
9.优选的,每个激励模块外接一个控制电源,每个激励模块与一组粘附-脱附模块电连接。
10.优选的,每个激励模块包括上电极和下电极。
11.优选的,所述粘附-脱附模块包括吸盘,吸盘与接触物的接触面内侧设置有可变形驱动机构。
12.优选的,所述可变形驱动机构包括机构主体。
13.优选的,所述机构主体采用离子聚合物-金属复合材料制备。
14.优选的,所述机构主体密封。
15.优选的,所述吸盘为喇叭状。
16.本公开还提供一种粘附-脱附装置的控制方法,包括如下步骤:
17.步骤1:控制电源发送第一电信号,经激励模块对粘附-脱附模块进行第一电激励,粘附-脱附模块沿第一方向变形减小与接触面的接触面积以实现与接触面的粘附;
18.步骤2:控制电源发送第二电信号,经激励模块对粘附-脱附模块进行第二电激励,粘附-脱附模块沿第二方向变形增加与接触面的接触面积以实现与接触面的脱附。
19.与现有技术相比,本公开带来的有益效果为:
20.1、利用离子聚合物-金属复合材料制备在电激励下可变形的机理使得吸盘完成与接触物的粘附和脱附,省去了传统的电机、齿轮等硬件设置,减小了装置体积;
21.2、将多个粘附-脱附模块接入一个电路,实现了同步控制,提高了装置的粘附和脱附响应速度。
附图说明
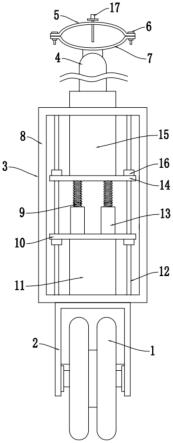
22.图1是本公开一个实施例提供的一种粘附-脱附装置的结构示意图;
23.图2是电极结构与吸盘的连接示意图;
24.图3(a)是可变形驱动机构的平面图;
25.图3(b)是可变形驱动机构的立体图;
26.图4是吸盘的结构示意图;
27.图5是吸盘的运动示意图;
28.图6是图1所示装置在曲面上的爬行示意图;
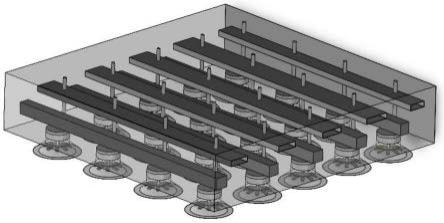
29.图7是传统的整片式粘附垫的结构示意图;
30.附图中的标记说明如下:
31.1、下电极导路;2、控制电源;3、上电极导路;4、粘附-脱附模块;5、上引线;6、下引线;7、可变形驱动机构;8、吸盘;9、下电极;10、上电极;11、可变形驱动机构的下电极通道;12、可变形驱动机构的上电极;13、可变形驱动机构的下电极。
具体实施方式
32.下面将参照附图1至图7详细地描述本公开的具体实施例。虽然附图中显示了本公开的具体实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
33.需要说明的是,在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可以理解,技术人员可能会用不同名词来称呼同一个组件。本说明书及权利要求并不以名词的差异作为区分组件的方式,而是以组件在功能上的差异作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”或“包括”为一开放式用语,故应解释成“包含但不限定于”。说明书后续描述为实施本公开的较佳实施方式,然所述描述乃以说明书的一般原则为目的,并非用以限定本公开的范围。本公开的保护范围当视所附权利要求所界定者为准。
34.为便于对本公开实施例的理解,下面将结合附图以具体实施例为例做进一步的解
释说明,且各个附图并不构成对本公开实施例的限定。
35.一个实施例中,如图1、图2所示,本公开提供一种粘附-脱附装置,包括:
36.装置主体,
37.所述装置主体包括多组粘附-脱附模块,
38.每组粘附-脱附模块在控制电源所施加的电激励作用下发生变形以独立实现与接触物的粘附和脱附。
39.传统的整片式粘附垫(如图7所示)的控制大都通过在粘附结构背面贴合一层激励响应层来实现。在粘附方面,传统的粘附垫通常需要外力按压才能与接触面粘附,本实施例通过控制电源控制粘附-脱附模块发生变形实现主动粘附。在脱附方面,传统粘附垫通常将背面激励层通电,使材料发生收缩翘曲,进而使得微结构被动地与接触面发生分离,激励响应层只能呈现翘曲和平整两种绝对状态,这使得粘附垫的脱附控制十分单一,由于微结构是被动地与接触面分离,分离过程中会产生较大的力变化,使得脱附过程非常的不稳定,对于爬壁机器人来说短时间内较大的力变化会使机器人失稳,这是十分不友好的。本实施例中的粘附-脱附模块可独立控制,互不干扰,因此能够使装置整体呈现出各种状态,例如前两组粘附-脱附模块在保持与接触面粘附的状态下,后三两组粘附-脱附模块可以与接触面脱离,这样的设计保证了机器人在爬行过程中的力的变化是可控且稳定的,从而能够在具有较大曲率的曲面上爬行(如图6所示)。
40.另一个实施例中,所述装置主体内设置有多个激励模块,每个激励模块外接一个控制电源2,每个激励模块与一组粘附-脱附模块电连接。
41.另一个实施例中,每个激励模块包括上电极10和下电极9,上电极10和下电极9分别位于上下平行的上电极导路3和下电极导路1中。
42.本实施例中,上电极和下电极位于上下平行设置相互独立的上电极导路和下电极导路中,两条导路分别设置有引线端口,上电极和下电极分别通过引线端口连接至控制电源。这种设计可以避免上电极和下电极之间因相互接触而导致可变形驱动机构短路。
43.另一个实施例中,每组粘附-脱附模块的可变形驱动机构与一个激励模块的上电极和下电极电连接。
44.本实施例中,从每组粘附-脱附模块中的每个可变形驱动机构的上电极12引出上引线5,上引线5通过上电极导路的引线通孔接入上电极10;从可变形驱动机构的下电极13引出下引线6,下引线6通过可变形驱动机构下电极通道11和下电极导路的引线通孔接入下电极9。将可变形驱动机构接入回路,使得控制电源仅通过一个上电极和一个下电极即可对每组粘附-脱附模块中的所有吸盘进行控制,从而实现了吸盘的同步控制。并且,当每组吸盘中的某个出现故障时,也不会影响其他吸盘的正常使用,甚至,即使不对该故障吸盘进行更换,对粘附-脱附装置的整体使用也不会造成显著影响,从而延长其作业时间,提高作业效率。
45.通过平行的上下分层电极的布置和粘附-脱附模块的控制实现了每组粘附-脱附模块在由控制电源所施加的电激励作用下发生变形以独立实现与接触物的粘附和脱附。
46.另一个实施例中,如图4所示,所述粘附-脱附模块包括吸盘8,吸盘8与接触物的接触面内侧设置有可变形驱动机构7。
47.另一个实施例中,所述可变形驱动机构7包括机构主体。
48.本实施例中,如图3(a)和图3(b)所示,机构主体呈花瓣状,即中间部分为花蕊,四周延伸部分为花瓣。中间花蕊部分上设置有通孔,分别从通孔的上下两侧引出导线。此外,通孔内设计有导线引出通道,使得由上下两侧引出的导线互不接触,从而避免短路。图3(b)中,可变形驱动机构的上电极12连接上引线5,上引线5经上电极导路的引线通孔接入上电极10;可变形驱动机构的下电极13连接下引线6,下引线6经可变形驱动机构下电极通道11和下电极导路的引线通孔接入下电极9。机构主体采用花瓣状的设计,能够使得机构主体在控制电源所发送的电信号的控制下运动更加灵活、弯曲方便。
49.进一步,机构主体的每个花瓣部分均通过金属焊接在一起连接导电,从而使得使得每一个花瓣连接成一体,进而实现了每个花瓣统一的激励控制。
50.由于离子聚合物-金属复合材料具有在施加电场的情况下发生形变的特性,因此,由离子聚合物-金属复合材料制备获得的可变形驱动机构可替代传统的电机,可以省掉齿轮、轴承等复杂的驱动结构,同时减轻重量,从而实现了吸盘的结构-驱动一体化。
51.另一个实施例中,所述机构主体密封。
52.本实施例中,当离子聚合物-金属复合材料中的水含量降低时,其受电激励产生的致动能力会减弱,因此,需要将机构主体整体进行密封以防止水分流失,从而保持其致动能力。
53.另一个实施例中,所述吸盘为喇叭状。
54.本实施例中,吸盘设计为喇叭状,可以增加与接触面的接触面积。另外,吸盘的中间位置为球形凹坑结构,可以增加其与接触面接触后的真空负压,进而提高吸盘与接触物之间的粘附能力。
55.另一个实施例中,本公开还提供一种粘附-脱附装置的控制方法,包括如下步骤:
56.步骤1:控制电源发送第一电信号(可以是正负电流信号,也可以是正负电压信号),第一电信号经激励模块对粘附-脱附模块进行第一电激励,如图5所示,使得粘附-脱附模块沿第一方向变形(本实施例中,粘附-脱附模块发生了向上的弯曲变形),使得粘附-脱附模块收缩并与接触面之间形成负压室,从而减小其与接触面的接触面积,进而实现与接触面的粘附;
57.步骤2:控制电源发送第二电信号(可以是负正电流信号,也可以是负正电压信号),第二电信号经激励模块对粘附-脱附模块进行第二电激励,使得粘附-脱附模块沿第二方向变形(本实施例中,粘附-脱附模块发生了向下的弯曲变形),使得粘附-脱附模块扩张失去与接触面之间的压差,从而增加其与接触面的接触面积,进而实现与接触面的脱附。
58.上述具体实施可由本领域技术人员在不背离本公开原理和宗旨的前提下以不同的方式对其进行局部调整,本公开的保护范围以权利要求书为准且不由上述具体实施所限,在其范围内的各个方案均受本公开之约束。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。