1.本发明涉及无线充电技术领域,具体为一种水下机器人自主无线充电装置。
背景技术:
2.近年来,计算机科学、智能控制机器人领域飞速发展。随着环境变化,众多水下设备应运而生,但其巡航时间短,当电量到达设置最低阈值,需人工打捞更换电池,这大大降低了机器人的工作效率和智能化,也给相关人员带来一系列安全隐患。
3.目前机器人最常见的充电方式为接触式充电。接触式充电采用接口对接技术,在日常的机器人设备中应用较为广泛。但在水下,这种充电方式极易因接触不良而使水进入装置造成瞬间短路烧毁,极大影响了充电效率和设备正常运作。还有另外一种非接触式感应充电,基于一种无线连接充电系统,充电时,其空隙会附着一些毛发、液体以及含有金属的颗粒物,导致影响充电效率和设备有效运作。
4.而目前无线充电装置在应用于日常生活中时,也经常因渗透液体导致无线装置无法正常运作,甚至造成电路烧毁,所以我们提出了一种水下机器人自主无线充电装置,以便于解决上述中提出的问题。
技术实现要素:
5.本发明的目的在于提供一种水下机器人自主无线充电装置,以解决上述背景技术提出的水下机器人巡航时间短,当电量到达设置最低阈值,需人工打捞更换电池,这大大降低了机器人的工作效率和智能化,也给相关人员带来一系列安全隐患,而无线充电装置充电时,其空隙会附着一些毛发、液体以及含有金属的颗粒物,导致影响充电效率和设备有效运作的问题。
6.为实现上述目的,本发明提供如下技术方案:一种水下机器人自主无线充电装置,包括水下预设的充电发射端机构和机器人设备上的充电接收端机构,所述充电发射端机构包括硬件模块和软件模块;
7.所述硬件模块包括充电装置本体,所述充电装置本体外部包裹有防水密封外壳,所述防水密封外壳外部涂有防水涂层,所述充电装置本体上设置有充电端口,所述充电端口上开设有充电滑槽,所述充电端口上设置有对接模块、mcu控制模块、电源模块和无线充电发射模块,所述充电装置本体上设置有指示灯模块;
8.所述软件模块包括对接判断模块、指示灯控制模块和电源控制模块,所述mcu控制模块与指示灯控制模块和电源控制模块二者均为电性连接,所述对接模块与对接判断模块电性连接;
9.所述充电接收端机构包括无线充电接收模块和视觉基准模块,所述充电发射端机构接收机器人设备就位后,所述视觉基准模块进行充电端口的自动瞄准,再由所述充电滑槽滑入无线充电接收模块开始充电。
10.优选的,所述防水密封外壳包括防水层、密封层和无线吸波层,所述防水层位于最
外层,所述密封层位于中间层,所述无线吸波层位于最内层。
11.优选的,所述电源模块包括ac-dc降压模块和dc-dc稳压模块,所述ac-dc降压模块将交流电源转换为直流电源,并通过dc-dc稳压模块提供给无线充电发射模块。
12.优选的,所述对接模块为霍尔开关。
13.优选的,所述对接模块接收对接判断模块发出的判断信号,并将信号传递给mcu控制模块,所述mcu控制模块向指示灯控制模块发出相应信号控制指示灯模块做出相应反应,并控制电源模块开始充电。
14.优选的,所述充电接收端机构包括电量反馈模块和无线通讯模块,所述充电发射端机构包括反馈接收模块和无线通讯模块,当机器人设备水下运行工作电量低于设置电量阈值时,所述电量反馈模块通过所述无线通讯模块将信号传递至移动终端,移动终端再通过所述无线通讯模块将信号传递至所述反馈接收模块。
15.优选的,所述充电发射端机构包括自动巡回控制模块,所述反馈接收模块接收到电量反馈模块发送的信号并传递至所述自动巡回控制模块,所述自动巡回控制模块将开启机器人设备的自动巡回系统进行导航巡回。
16.优选的,所述充电发射端机构包括定位模块,机器人设备的自动巡回系统接收所述定位模块发出的定位信号并不断靠近所述充电发射端机构。
17.优选的,所述无线充电接收模块将电磁信号转换为电信号为机器人设备进行充电。
18.优选的,充电完成后,所述mcu控制模块控制电源模块断电,并向指示灯控制模块发出相应信号控制指示灯模块做出相应反应。
19.与现有技术相比,本发明的有益效果是:
20.(1)本发明在充电装置本体外部包裹有防水密封外壳,防水密封外壳包括防水层、密封层和无线吸波层,防水密封外壳外部涂有防水涂层,使得本发明能够更好地在水下运行,从而避免水渗透到内部导致无法正常运作,甚至造成电路烧毁的问题,同时充电端口的充电滑槽与机器人的无线充电接收模块能够更好地对接充电,从而避免了其他因素的干扰,提高了充电效率。
21.(2)本发明改变了传统充电方式,当机器人的电量低于设置阈值时,通过移动终端启动机器人的自动巡回系统,使得机器人到达本装置预设点,并通过视觉基准模块进行充电端口的自动瞄准,再由充电滑槽滑入无线充电接收模块开始充电,充电完成后,mcu控制模块控制电源模块断电,两者分离,机器人继续完成任务,从而提高了机器人的工作效率和水下无线充电的智能化程度,实现了自动充电和持续巡航的功能。
附图说明
22.图1为本发明无线充电流程示意图;
23.图2为本发明机器人设备自动巡回流程示意图;
24.图3为本发明充电端口对接流程示意图;
25.图4为本发明防水密封外壳结构示意图;
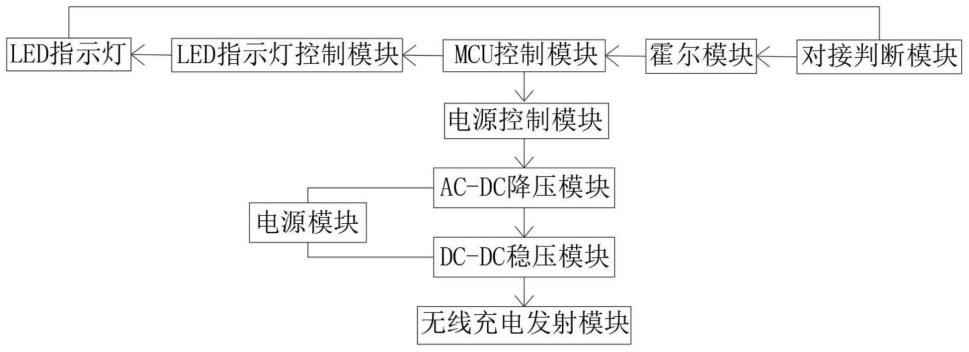
26.图5为本发明充电发射端机构硬件模块示意图。
27.图中:1、充电装置本体;2、防水密封外壳;201、防水层;202、密封层;203、无线吸波
层;3、充电端口;4、充电滑槽;5、对接模块;6、mcu控制模块;7、电源模块;701、ac-dc降压模块;702、dc-dc稳压模块;8、无线充电发射模块;9、指示灯模块;10、对接判断模块;11、指示灯控制模块;12、电源控制模块;13、反馈接收模块;14、无线通讯模块;15、自动巡回控制模块;16、定位模块;17、无线充电接收模块;18、视觉基准模块;19、电量反馈模块。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.请参阅图1-图5,本发明提供一种技术方案:一种水下机器人自主无线充电装置,包括水下预设的充电发射端机构和机器人设备上的充电接收端机构,充电发射端机构包括硬件模块和软件模块;
30.硬件模块包括充电装置本体1,充电装置本体1外部包裹有防水密封外壳2,防水密封外壳2外部涂有防水涂层,充电装置本体1上设置有充电端口3,充电端口3上开设有充电滑槽4,充电端口3上设置有对接模块5、mcu控制模块6、电源模块7和无线充电发射模块8,充电装置本体1上设置有指示灯模块9;
31.软件模块包括对接判断模块10、指示灯控制模块11和电源控制模块12,mcu控制模块6与指示灯控制模块11和电源控制模块12二者均为电性连接,对接模块5与对接判断模块10电性连接;
32.充电接收端机构包括无线充电接收模块17和视觉基准模块18,充电发射端机构接收机器人设备就位后,视觉基准模块18进行充电端口3的自动瞄准,再由充电滑槽4滑入无线充电接收模块17开始充电。
33.防水密封外壳2包括防水层201、密封层202和无线吸波层203,防水层201位于最外层,密封层202位于中间层,无线吸波层203位于最内层。
34.电源模块7包括ac-dc降压模块701和dc-dc稳压模块702,ac-dc降压模块701将交流电源转换为直流电源,并通过dc-dc稳压模块702提供给无线充电发射模块8。
35.对接模块5为霍尔开关。
36.对接模块5接收对接判断模块10发出的判断信号,并将信号传递给mcu控制模块6,mcu控制模块6向指示灯控制模块11发出相应信号控制指示灯模块9做出相应反应,并控制电源模块7开始充电。
37.充电接收端机构包括电量反馈模块19和无线通讯模块14,充电发射端机构包括反馈接收模块13和无线通讯模块14,当机器人设备水下运行工作电量低于设置电量阈值时,电量反馈模块19通过无线通讯模块14将信号传递至移动终端,移动终端再通过无线通讯模块14将信号传递至反馈接收模块13。
38.充电发射端机构包括自动巡回控制模块15,反馈接收模块13接收到电量反馈模块19发送的信号并传递至自动巡回控制模块15,自动巡回控制模块15将开启机器人设备的自动巡回系统进行导航巡回。
39.充电发射端机构包括定位模块16,机器人设备的自动巡回系统接收定位模块16发
出的定位信号并不断靠近充电发射端机构。
40.无线充电接收模块17将电磁信号转换为电信号为机器人设备进行充电。
41.充电完成后,mcu控制模块6控制电源模块7断电,并向指示灯控制模块11发出相应信号控制指示灯模块9做出相应反应。
42.实施例一
43.一种水下机器人自主无线充电装置,包括水下预设的充电发射端机构和机器人设备上的充电接收端机构,充电发射端机构包括硬件模块和软件模块;
44.硬件模块包括充电装置本体1,充电装置本体1外部包裹有防水密封外壳2,防水密封外壳2包括防水层201、密封层202和无线吸波层203,防水层201位于最外层,密封层202位于中间层,无线吸波层203位于最内层,防水密封外壳2外部涂有防水涂层,使得本发明能够更好地在水下运行,从而避免水渗透到内部导致无法正常运作,甚至造成电路烧毁的问题。
45.充电接收端机构包括电量反馈模块19和无线通讯模块14,充电发射端机构包括反馈接收模块13和无线通讯模块14,当机器人设备水下运行工作电量低于设置电量阈值时,电量反馈模块19通过无线通讯模块14将信号传递至移动终端,移动终端再通过无线通讯模块14将信号传递至反馈接收模块13。
46.充电发射端机构包括自动巡回控制模块15,反馈接收模块13接收到电量反馈模块19发送的信号并传递至自动巡回控制模块15,自动巡回控制模块15将开启机器人设备的自动巡回系统进行导航巡回。
47.软件模块包括对接判断模块10、指示灯控制模块11和电源控制模块12,mcu控制模块6与指示灯控制模块11和电源控制模块12二者均为电性连接,对接模块5与对接判断模块10电性连接,充电发射端机构包括定位模块16,机器人设备的自动巡回系统接收定位模块16发出的定位信号并不断靠近充电发射端机构。
48.充电装置本体1上设置有充电端口3,充电端口3上开设有充电滑槽4,充电端口3上设置有对接模块5、mcu控制模块6、电源模块7和无线充电发射模块8,对接模块5为hl-20n1霍尔开关,电源模块7包括ac-dc降压模块701和dc-dc稳压模块702,ac-dc降压模块701将交流电源转换为直流电源,并通过dc-dc稳压模块702提供给无线充电发射模块8,充电装置本体1上设置有指示灯模块9。对接模块5接收对接判断模块10发出的判断信号,并将信号传递给mcu控制模块6,mcu控制模块6向指示灯控制模块11发出相应信号控制指示灯模块9做出相应反应,并控制电源模块7开始充电。
49.充电接收端机构包括无线充电接收模块17和视觉基准模块18,充电发射端机构接收机器人设备就位后,视觉基准模块18进行充电端口3的自动瞄准,再由充电滑槽4滑入无线充电接收模块17开始充电。
50.无线充电接收模块17将电磁信号转换为电信号为机器人设备进行充电,充电完成后,mcu控制模块6控制电源模块7断电,并向指示灯控制模块11发出相应信号控制指示灯模块9做出相应反应。
51.工作原理:在使用该水下机器人自主无线充电装置时,首先,充电发射端机构预设于水下,当机器人设备水下运行工作电量低于设置电量阈值时,电量反馈模块19通过无线通讯模块14将信号传递至移动终端,移动终端再通过无线通讯模块14将信号传递至反馈接收模块13,反馈接收模块13接收到电量反馈模块19发送的信号并传递至自动巡回控制模块
15,自动巡回控制模块15将开启机器人设备的自动巡回系统进行导航巡回,机器人设备的自动巡回系统接收定位模块16发出的定位信号并不断靠近充电发射端机构,充电发射端机构接收机器人设备就位后,视觉基准模块18进行充电端口3的自动瞄准,再由充电滑槽4滑入无线充电接收模块17进行对接,对接模块5接收对接判断模块10发出的判断信号,并将信号传递给mcu控制模块6,mcu控制模块6向指示灯控制模块11发出相应信号控制指示灯模块9做出相应反应,并控制电源模块7中的ac-dc降压模块701将交流电源转换为直流电源,并通过dc-dc稳压模块702提供给无线充电发射模块8,无线充电接收模块17将电磁信号转换为电信号为机器人设备进行充电。
52.充电完成后,mcu控制模块6控制电源模块7断电,并向指示灯控制模块11发出相应信号控制指示灯模块9做出相应反应,机器人设备与本装置分离,机器人设备继续完成任务,从而提高了机器人的工作效率和水下无线充电的智能化程度,实现了自动充电和持续巡航的功能。充电装置本体1外部包裹有防水密封外壳2,防水密封外壳包括防水层201、密封层202和无线吸波层203,防水密封外壳2外部涂有防水涂层,使得本发明能够更好地在水下运行,从而避免水渗透到内部导致无法正常运作,甚至造成电路烧毁的问题,同时充电端口3的充电滑槽4与机器人的无线充电接收模块17能够更好地对接充电,从而避免了其他因素的干扰,提高了充电效率。这就是本发明的整个工作流程。且本说明书中未作详细描述的内容均属于本领域专业技术人员公知的现有技术。
53.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。