1.本发明属于风洞试验技术领域,具体涉及一种风洞试验防振动碰撞位置控制方法。
背景技术:
2.机体安装效应噪声是指机体与发动机相互干扰而产生的噪声。风洞试验是研究机体/风扇安装效应噪声问题的重要手段。由于涡扇飞机气动噪声受机体与发动机干涉影响显著,需建立一种在风洞流场中实时测量与控制模型与风扇短舱相对位置的试验方法,为机体安装效应噪声类风洞试验提供必要的试验条件。
技术实现要素:
3.本发明目的是提供一种风洞试验防振动碰撞位置控制方法,在风洞试验过程中实时测量机翼模型表面与风扇短舱模型挂架的相对距离,防止机翼模型表面与风扇短舱模型挂架因振动而剧烈挤压碰撞,保持在硅胶层弹性范围内的贴合。
4.为实现上述目的,本发明所采用的技术方案如下:一种风洞试验防振动碰撞位置控制方法,步骤如下:
5.步骤1,机翼模型竖直安装在四自由度平台上,四自由度平台安装在滑轨上,由移动伺服电机驱动四自由度平台在滑轨上移动,液压支撑结构用于支撑风扇短舱模型并调整风扇短舱模型的迎角变化;
6.步骤2,在风扇短舱模型的壳体和轴套内布置加速度计,在不安装机翼模型的情况下进行一次吹风试验,测量得到风扇短舱模型在流场中的振幅;
7.步骤3,搭建控制系统,根据加速度计测量的振幅,得到用于控制机翼模型在滑轨上移动的伺服电机的pid控制器的参数整定的初始值,参数整定后,建立pid控制器;所述的控制系统包括工控机、plc和变频器,工控机、plc、变频器依次电信号连接,变频器与移动伺服电机连接;
8.步骤4,在机翼模型表面布置五个并列的激光测距传感器,组成激光测距传感器线阵,保证线阵中至少三个传感器能测出到风扇短舱模型挂架支杆外壁面的距离,相当于获得支杆截面圆周上三个点的坐标,以任一激光测距传感器的位置为坐标原点,五个传感器连线为y轴,激光测距传感器发出的激光光束为x轴,建立平面直角坐标系,进而得到机翼模型表面到风扇短舱模型挂架支杆外壁面的最小距离;
9.步骤5,将处理后得到的最小距离作为反馈,与目标值做差,把该差值作为步骤3中得到的pid控制器控制输入量;
10.步骤6,用pid控制器控制移动伺服电机,带动机翼模型移动,重复步骤3-5,实时闭环控制机翼模型与风扇短舱模型挂架支杆的相对位置,保证二者在试验过程中既能保持贴合,又不会因风洞流场中的气流产生抖动而导致剧烈挤压碰。
11.本发明的优点及有益效果:本发明提供了一种风洞试验防振动碰撞位置控制方
法,能够防止机翼模型表面与风扇短舱挂架因振动而剧烈碰撞,保持在硅胶层弹性范围内的贴合,本发明提高了试验机体安装效应噪声试验的效率及精度,为机体安装效应噪声类风洞试验提供必要的试验条件。
附图说明:
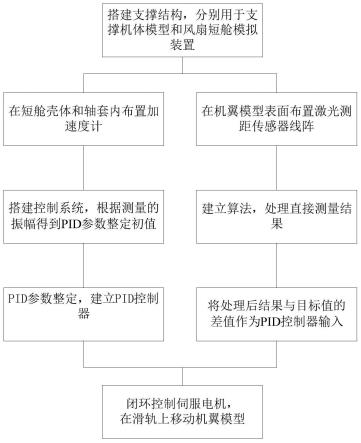
12.图1是风洞试验防振动碰撞位置控制方法流程图。
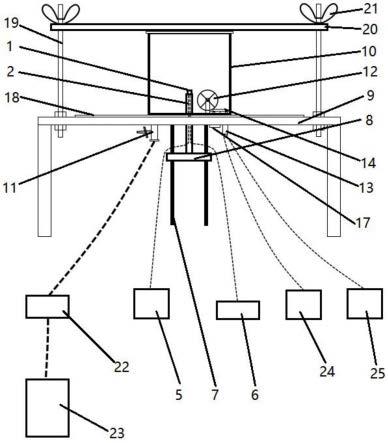
13.图2是机体/风扇安装效应噪声风洞试验设备示意图。
14.图3是激光测距传感器线阵在机翼模型表面布置示意图。
15.图4是激光测距传感器线阵与支杆相对位置关系截面示意图。
16.图5是伺服电机pid位置控制原理图。
17.其中,1-机体模型,2-风扇短舱模拟装置,3-液压支撑,4-四自由度平台,5-风洞喷口,6-风洞收集器,7-风扇短舱模拟装置支杆,8-激光测距传感器。
具体实施方式:
18.为使申请实施的目的、技术方案更加清楚,下面将结合本技术实施方式中的附图,对本技术方式中的技术方案进行更加详细的描述。所描述的实施方式是本技术一部分实施方式,而不是全部的实施方式。下面通过参考附图的实施方式是实例性的,旨在用于解释本技术,而不能理解为对申请的限制。基于本技术中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本技术保护的范围,下面结合附图对本技术的实施方式进行详细说明。
19.实施例1
20.如图1所示,一种风洞试验防振动碰撞位置控制方法,步骤如下;
21.步骤1,搭建支撑结构,支撑结构分别用于支撑机翼模型和风扇短舱模拟装置;如图2所示,机翼模型竖直安装在四自由度平台上,四自由度平台安装在滑轨上,由移动伺服电机驱动四自由度平台在滑轨上移动,四自由度平台结构包括:滚珠丝杠、直线单元、转盘。机翼模型自由度通过滚珠丝杠、直线单元、转盘共同调节实现变化。液压支撑结构用于支撑并调整风扇短舱模型,液压支撑结构包括风扇短舱模型挂架支杆、拐臂结构、升降立柱、升降导轨、随动线缆以及井道。
22.步骤2,在风扇短舱模型的壳体和轴套内布置加速度计,先不安装机翼模型进行一次吹风试验,测量得到风扇短舱模型在流场中的振幅;
23.步骤3,搭建控制系统,根据加速度计测量的振幅,得到用于控制机翼模型在滑轨上移动的伺服电机的pid控制器的参数整定的初始值,参数整定后,建立pid控制器;所述的控制系统包括工控机、plc和变频器,工控机、plc、变频器依次电信号连接,变频器与移动伺服电机连接;
24.步骤4,如图3-4所示,在机翼模型表面并列布置五个激光测距传感器,组成激光测距传感器线阵,以第三激光测距传感器的位置为坐标原点,五个传感器连线为y轴,激光测距传感器发出的激光光束为x轴,建立平面直角坐标系,由于风洞试验中支杆振动振幅最大不超过6cm,根据几何分析,最极端情况下,也能保证线阵中至少3个传感器能测出到支杆表面的距离,相当于获得支杆截面(直径180mm)圆周上三个点的坐标,进而得到机翼模型表面
到支杆外壁面的最小距离;
25.步骤5,如图5所示,将处理后得到的最小距离作为反馈,与目标值做差,把该差值作为步骤3中得到的pid控制器控制输入量;
26.步骤6,用pid控制器控制移动伺服电机,带动机翼模型移动,重复步骤3-5,实时闭环控制机翼模型与风扇短舱模型挂架支杆的相对位置,保证二者在试验过程中既能保持贴合,又不会因风洞流场中的气流产生抖动而导致剧烈挤压碰。
27.实施例2
28.试验前,进行风扇短舱模拟装置地面调试,包括风扇动平衡测试、电机传动测试、所有传感器安装布置与测试。试验时,将风扇短舱模拟装置中心正对风洞喷口中心,并调整机体模型支撑相应高度。先不安装机翼模型进行一次吹风试验,通过加速度计获得短舱模拟装置的振幅,进而得到pid参数整定的初始值,随后进行参数整定,建立pid控制器。安装模型到位后,检查模型安装情况,检查试验装置运转情况,确保模型安装准确,试验装置能正常运转。确定试验设备和模型状态后,可开展风洞试验,实时采集激光测距传感器线阵测量数据,得到机翼模型表面与短舱挂架的距离。风洞风速和风扇转速由低逐渐增大,确定安全后,输入目标值,通过pid控制器控制伺服电机带动机翼模型,实时闭环控制机翼模型与短舱挂架的相对位置,达到机体/风扇安装效应噪声风洞试验的试验要求。
29.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。