1.本技术涉及一种车辆底盘监控技术,尤其涉及一种具有工位安装零件的安装情况监测的车辆底盘视觉检测系统。
背景技术:
2.传统的车辆底盘检测,一般是通过人眼观察,确定车辆装配是否出现错误,由于车辆底盘面积大,底盘零件种类、数量多,这种情况下检测人员长时间肉眼观察工作量大,速度慢,效率低,并且人工成本高,检测数据无法及时处理,管理人员无法通过记录错误数据进行回顾,从而无法导致生产质量提升。
技术实现要素:
3.针对现有技术存在的问题,本技术的目的在于提供一种车辆底盘视觉检测系统,以至少解决前述的技术问题。
4.根据本技术的第一方面,提供一种车辆底盘视觉检测系统,包括图像采集模块、底盘图像捕捉模块、远程通讯模块和处理设备;
5.其中,底盘图像捕捉模块,用于接收车辆运动触发的传感器的信号,判断车辆所处位置,触发图像采集模块对车辆所处位置进行拍摄;
6.图像采集模块,用于响应于所述底盘图像捕捉模块的触发信号,对车辆所处位置进行图像采集,获得车辆底盘的图像;
7.远程通讯模块,用于将所采集的车辆底盘的图像通过无线通信链路向所述处理设备发送;
8.处理设备,用于对车辆底盘的图像进行识别,确定所处车辆底盘的各零部件进行识别,判断车辆底盘的零部件是否安装完备,零部件的安装位置是否正确,以及零部件的安装精度是否满足要求中的至少之一;根据车辆底盘的零部件的判断结果,输出零部件的安装异常信息。
9.在一些实施例中,所述处理设备包括图像处理模块、图像算法模块、诊断模块和输出界面;其中,
10.图像处理模块,用于对车辆底盘的图像进行特征识别,确定车辆底盘中各类零部件;
11.图像算法模块,用于基于图像中的深度信息,确定出车辆底盘中各类零部件的尺寸、位置及形状,确定各零部件的相对位置关系;
12.诊断模块,基于零部件的相对位置关系,确定相应的零部件是否装配,装备位置是否到位;确定车辆底盘中各零部件的安装异常信息;
13.输出界面,用于输出零部件的安装异常信息。
14.在一些实施例中,所述检测系统还包括报警模块,用于接收所述诊断模块生成的告警指示信息,基于所述告警指示信息发出告警。
15.在一些实施例中,所述传感器包括压力传感器;
16.所述压力传感器埋设于车辆途径的设定区域,当检测到车辆途径的压力的情况下,触发所述底盘图像捕捉模块启动。
17.在一些实施例中,所述传感器包括红外线传感器;
18.所述红外线传感器检测到扫描对象为车辆的情况下,触发所述底盘图像捕捉模块启动。
19.在一些实施例中,所述图像采集模块包括电荷耦合器件(charge coupled device,ccd)相机或深度相机。
20.在一些实施例中,所述远程通讯模块包括移动通信系统支持的通讯模块、无线保真(wireless fidelity,wifi)通讯模块。
21.本技术中,通过设置图像采集模块和底盘图像捕捉模块,能对车辆的底盘区域进行自动图像采集,并对底盘图像中的零部件的安装情况进行相应识别,并对识别后的零部件的安装情况进行自动判断,以确定车辆底盘的零部件中是否有安装缺失或安装精度等不达标的情况。本技术确保了车辆底盘的零部件安装的准确性,确保了车辆底盘的安装安全性。由于本技术通过自动图像采集及自动识别,完全替代了车辆底盘的人工检测,不仅提升了车辆底盘的识别准确性,也提升了车辆底盘零部件的识别效率。并且,可以对识别结果进行自动保存,以作为车辆底盘的识别日志等,便于检测结果的数据传输及数据的长期存储。
附图说明
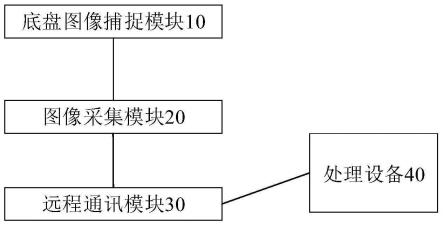
22.图1为本技术实施例的车辆底盘视觉检测系统的结构示意图;
23.图2为本技术实施例的车辆底盘视觉检测系统的应用示例示意图;
24.图3为本技术实施例的处理设备的组成结构示意图。
具体实施方式
25.下面将参照附图更详细地描述本技术公开的示例性实施方式。虽然附图中显示了本技术的示例性实施方式,然而应当理解,可以以各种形式实现本技术,而不应被这里阐述的具体实施方式所限制。相反,提供这些实施方式是为了能够更透彻地理解本技术,并且能够将本技术公开的范围完整的传达给本领域的技术人员。
26.在下文的描述中,给出了大量具体的细节以便提供对本技术更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本技术可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本技术发生混淆,对于本领域公知的一些技术特征未进行描述;即,这里不描述实际实施例的全部特征,不详细描述公知的功能和结构。
27.在附图中,为了清楚,层、区、元件的尺寸以及其相对尺寸可能被夸大。自始至终相同附图标记表示相同的元件。
28.应当明白,当元件或层被称为“在
……
上”、“与
……
相邻”、“连接到”或“耦合到”其它元件或层时,其可以直接地在其它元件或层上、与之相邻、连接或耦合到其它元件或层,或者可以存在居间的元件或层。相反,当元件被称为“直接在
……
上”、“与
……
直接相邻”、“直接连接到”或“直接耦合到”其它元件或层时,则不存在居间的元件或层。应当明白,尽管可使用术语第一、第二、第三等描述各种元件、部件、区、层和/或部分,这些元件、部件、区、
层和/或部分不应当被这些术语限制。这些术语仅仅用来区分一个元件、部件、区、层或部分与另一个元件、部件、区、层或部分。因此,在不脱离本技术教导之下,下面讨论的第一元件、部件、区、层或部分可表示为第二元件、部件、区、层或部分。而当讨论的第二元件、部件、区、层或部分时,并不表明本技术必然存在第一元件、部件、区、层或部分。
29.空间关系术语例如“在
……
下”、“在
……
下面”、“下面的”、“在
……
之下”、“在
……
之上”、“上面的”等,在这里可为了方便描述而被使用从而描述图中所示的一个元件或特征与其它元件或特征的关系。应当明白,除了图中所示的取向以外,空间关系术语意图还包括使用和操作中的器件的不同取向。例如,如果附图中的器件翻转,然后,描述为“在其它元件下面”或“在其之下”或“在其下”元件或特征将取向为在其它元件或特征“上”。因此,示例性术语“在
……
下面”和“在
……
下”可包括上和下两个取向。器件可以另外地取向(旋转90度或其它取向)并且在此使用的空间描述语相应地被解释。
30.在此使用的术语的目的仅在于描述具体实施例并且不作为本技术的限制。在此使用时,单数形式的“一”、“一个”和“所述/该”也意图包括复数形式,除非上下文清楚指出另外的方式。还应明白术语“组成”和/或“包括”,当在该说明书中使用时,确定所述特征、整数、步骤、操作、元件和/或部件的存在,但不排除一个或更多其它的特征、整数、步骤、操作、元件、部件和/或组的存在或添加。在此使用时,术语“和/或”包括相关所列项目的任何及所有组合。
31.图1为本技术实施例的车辆底盘视觉检测系统的结构示意图,如图1所示,本技术实施例的车辆底盘视觉检测系统包括底盘图像捕捉模块10、图像采集模块20、远程通讯模块30和处理设备40;
32.其中,其中,底盘图像捕捉模块10,用于接收车辆运动触发的传感器的信号,判断车辆所处位置,触发图像采集模块20对车辆所处位置进行拍摄。
33.图像采集模块20,用于响应于所述底盘图像捕捉模块的触发信号,对车辆所处位置进行图像采集,获得车辆底盘的图像。这里,图像采集模块20可以为ccd相机,或深度相机等图像拍摄设备。
34.远程通讯模块30,用于将所采集的车辆底盘的图像通过无线通信链路向所述处理设备40发送。本技术实施例中,远程通讯模块30可以为动通信系统支持的通讯模块如移动通信系统或电信通信系统或联通的用户身份识别sim卡等,其可以通过移动通信系统提供的3g、4g或5g通信模式与处理设备40之间建立无线通信链路,实现数据的收发等。作为一种实现方式,远程通讯模块30也可以是wifi通讯模块,远程通讯模块30通过接入热点网络实现与处理设备40之间的远程通信。
35.处理设备40,用于对车辆底盘的图像进行识别,确定所处车辆底盘的各零部件进行识别,判断车辆底盘的零部件是否安装完备,零部件的安装位置是否正确,以及零部件的安装精度是否满足要求中的至少之一;根据车辆底盘的零部件的判断结果,输出零部件的安装异常信息。
36.本技术实施例中,处理设备40可以是计算机、平板电脑等电子设备。该处理设备40支持图像处理及图像算法等功能,能够对图像中的相应对象如零部件、零部件之间的相对位置关系等进行识别。作为一种实现方式,所述传感器包括压力传感器;所述压力传感器埋设于车辆途径的设定区域,当检测到车辆途径的压力的情况下,触发所述底盘图像捕捉模
块启动。本技术实施例中,当传感器为压力传感器的情况下,当车辆经过该压力传感器且对压力传感器施加一定压力如大于5000牛的情况下,才将待识别对象识别为车辆。本技术实施例中,可以根据待识别对象如车辆的重量,来对应设置车辆碾压压力传感器的压力范围,可以设定为车辆碾压时的压力范围,以此精准识别出是待检测的车辆。作为一种实现方式,所述传感器包括红外线传感器;所述红外线传感器检测到扫描对象为车辆的情况下,触发所述底盘图像捕捉模块启动。
37.本技术实施例中,所述车辆底盘视觉检测系统还包括报警模块,用于接收所述诊断模块生成的告警指示信息,基于所述告警指示信息发出告警。以提示工作人员车辆底盘的零部件安装具有故障,方便工作人员尽快对故障进行排查,保证车辆底盘的安装安全。
38.图2为本技术实施例的车辆底盘视觉检测系统的应用示例示意图,如图2所示,为该车辆底盘视觉检测系统运用于车辆底盘检测的示例。本技术实施例的车辆底盘视觉检测系统旨在解决通过机器检测替代人工检测车辆底盘螺栓螺钉、护板等错漏装现象,实现人力成本的节约,最终达到低成本检查车辆装配情况。本技术实施例的车辆底盘视觉检测系统中,主要包括工业相机及支架,其实现前述的底盘图像捕捉模块和底盘图像采集模块的功能,主要对车辆底盘进行对象捕捉,并对车辆底盘进行图像采集,基于所采集的图像向工控机(处理设备40)发送,并工控机对采集图像进行零部件如螺钉、螺栓及护板等零部件的安装情况进行检测。本技术实施例中,螺钉、螺栓及护板的识别仅为示例,车辆底盘的其他零部件,均可自动识别其安装情况。
39.本技术实施例的车辆底盘视觉检测系统在不影响车辆正常下线生产的情况下,能够进行车辆底盘的自动检测及故障问题报错。如图2所示,其车辆底盘的检测包括:工控机设备上电初始化,进入自检状态;通过车辆前进运动触发传感器,经过信号采集处理后,判断车辆所处位置,触发工业相机对车辆底盘进行拍摄,获取车辆底盘的图像。对采集图像进行预处理,对处理后的图片进行算法运算得出检测结果。将输出结果进行显示并通过4g形式发送至报警装置进行报警提示工人错漏装。
40.图3为本技术实施例的处理设备的组成结构示意图,如图3所示,本技术实施例的处理设备40包括图像处理模块401、图像算法模块402、诊断模块403和输出界面404;其中,
41.图像处理模块401,用于对车辆底盘的图像进行特征识别,确定车辆底盘中各类零部件;
42.图像算法模块402,用于基于图像中的深度信息,确定出车辆底盘中各类零部件的尺寸、位置及形状,确定各零部件的相对位置关系;
43.诊断模块403,基于零部件的相对位置关系,确定相应的零部件是否装配,装备位置是否到位;确定车辆底盘中各零部件的安装异常信息;
44.输出界面404,用于输出零部件的安装异常信息。
45.本技术实施例通过在车辆底盘视觉检测系统中设置图像采集模块20和底盘图像捕捉模块10,能对车辆的底盘区域进行自动图像采集,并对底盘图像中的零部件的安装情况进行相应识别,并对识别后的零部件的安装情况进行自动判断,以确定车辆底盘的零部件中是否有安装缺失或安装精度等不达标的情况。确保了车辆底盘的零部件安装的准确性,确保了车辆底盘的安装安全性。由于本技术通过自动图像采集及自动识别,完全替代了车辆底盘的人工检测,不仅提升了车辆底盘的识别准确性,也提升了车辆底盘零部件的识
别效率。并且,可以对识别结果进行自动保存,以作为车辆底盘的识别日志等,便于检测结果的数据传输及数据的长期存储。
46.应理解,说明书通篇中提到的“在本技术实施例”或“在一些实施例”意味着与实施例有关的特定特征、结构或特性包括在本技术的至少一个实施例中。因此,在整个说明书各处出现的“在本技术实施例”或“在一些实施例”未必一定指相同的实施例。此外,这些特定的特征、结构或特性可以任意适合的方式结合在一个或多个实施例中。应理解,在本技术的各种实施例中,上述各过程的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本技术实施例的实施过程构成任何限定。上述本技术实施例序号仅仅为了描述,不代表实施例的优劣。
47.本技术所提供的几个方法实施例中所揭露的方法,在不冲突的情况下可以任意组合,得到新的方法实施例。
48.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。