技术特征:
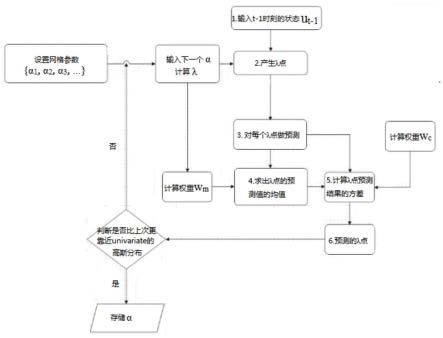
1.一种目标跟踪算法,其特征在于,所述目标跟踪算法包括:s1:设置关于α的参数网格;s2:遍历全部α,通过α计算得到λ及权重w
m
和w
c
;s3:获取λ点的分布情况;s4:对s3中的λ点通过汽车动力学模型得到的第一预测的λ点;s5:计算第一预测的λ点的均值和方差;s6:将s5计算均值和方差过程中引入状态预测的第一预测的λ点设置为第二预测的λ点,对第二预测的λ点再次计算方差;s7:输出第二预测的λ点的方差和均值以及第一预测的λ点中不包括第二预测的λ点的方差和均值,第二预测的λ点的均值与对应的s5中的第一预测的λ点的均值相同,判断第二预测的λ点以及第一预测的λ点中不包括第二预测的λ点的分布情况;s8:对下一个α值重复s4-s7,比较两个α值下的s7的分布情况结果,保留分布状态更好的λ点;s9:根据s8中结果获取最优的α参数,重复s3,获取在α参数最佳的情况下的最优估计值。2.根据权利要求1所述的目标跟踪算法,其特征在于,所述s7中判断第二预测的λ点以及第一预测的λ点中不包括第二预测的λ点的分布情况具体为:在状态量为一维的情况下,分布接近于正态分布更好;二维的情况下接近于椭圆更好;当维度大于2时,在每个维度上接近于高斯分布。3.根据权利要求1所述的目标跟踪算法,其特征在于,所述s3通过以下方法获得:λ=α2(n k)-n;χ
[0]
=μ;=μ;其中,n:状态的维数;α和κ:确定δ点分布在均值多远的范围内的比例参数;μ:状态向量,包含位置,速度和加速度状态信息;σ:当前时刻状态的协方差矩阵。4.根据权利要求1所述的目标跟踪算法,其特征在于,所述s2的计算方法如下:所述s2的计算方法如下:所述s2的计算方法如下:当i=1,...,2n;其中n为状态的维数,k值为影响λ点分布的参数,取值范围不固定,满足求解λ点的公式中的被平方根矩阵为正定矩阵。5.根据权利要求1所述的目标跟踪算法,其特征在于,所述s4中汽车动力学模型包括但不限于ctrv。6.根据权利要求1所述的目标跟踪算法,其特征在于,所述s5中计算方法如下:
其中,n:状态的维数;w
m
:计算均值所使用的权重;预测的状态矩阵;预测的状态的加权均值;w
c
:计算协方差所使用的权重;7.一种目标跟踪算法系统,包括上述权利要求1-6之一所述的目标跟踪算法,其特征在于,所述目标跟踪算法系统包括:参数网格预设单元,用于设置关于α的参数网格;参数计算单元,用于遍历全部α,通过α计算得到λ及权重w
m
和w
c
;λ点获取单元,用于获取λ点的分布情况;预测λ点获取单元,用于对λ点通过汽车动力学模型得到的第一预测的λ点;均值方差计算单元,用于计算第一预测的λ点的均值和方差;二次计算单元,用于将计算均值和方差过程中引入状态预测的第一预测的λ点设置为第二预测的λ点,对第二预测的λ点再次计算方差;分布判断单元,用于输出第二预测的λ点的方差和均值以及第一预测的λ点中不包括第二预测的λ点的方差和均值,第二预测的λ点的均值与对应的s5中的第一预测的λ点的均值相同,判断第二预测的λ点以及第一预测的λ点中不包括第二预测的λ点的分布情况;λ点筛选单元,通过对下一个α值重新输入均值方差计算单元,比较两个α值下的分布判断单元的输出结果,保留分布状态更好的λ点;输出单元,用于根据λ点筛选单元结果获取最优的α参数,获取在α参数最佳的情况下的最优估计值。8.一种可读存储介质,包括:存储器,所述存储器存储有程序;处理器,所述处理器执行所述程序时实现如权利要求1至6中任一项所述的目标跟踪算法。
技术总结
本发明提供了一种目标跟踪算法、系统及可读存储介质,属于自动驾驶技术领域,本发明进一步为一种目标跟踪的参数自我学习无迹卡尔曼滤波算法、系统及可读存储介质,本发明通过汽车动力学模型得到预测的λ点,同时对不同α值重复预测的λ点的方差和均值计算过程,比较两个α值下的预测的λ点的分布情况结果,保留分布状态更好的λ点;在保证α参数最佳的情况下的获取最优估计值。本发明能够大大减少寻找最优参数过程中的工作量,且能提高参数的准确性。性。性。
技术研发人员:陈海波 张玉池
受保护的技术使用者:深兰人工智能(深圳)有限公司
技术研发日:2022.08.09
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。