技术特征:
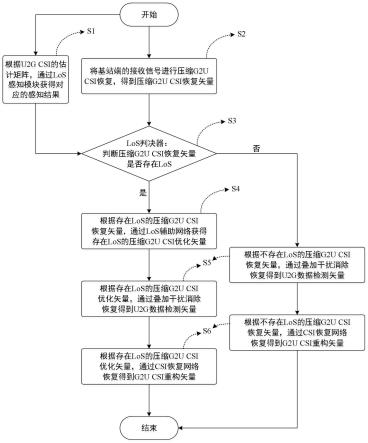
1.基于los感知uav毫米波系统的叠加csi反馈方法,其特征在于,包括以下步骤:s1.根据u2g csi的估计矩阵通过los感知模块获得对应的感知结果w;所述u2g csi,是指uav端到地面基站的信道状态信息;所述los,是指视距范围内能量最强的直射路径;所述的u2g csi的估计矩阵通过对接收信号进行信道估计获得;其中,l
a
代表簇路径数,n代表地面基站的天线数,m代表u2g数据的长度;s2.将基站端的接收信号y进行压缩g2u csi恢复,得到压缩g2u csi恢复矢量所述的压缩g2u csi恢复过程包括:第一次解扩、第一次压缩g2u csi估计、压缩g2u csi干扰消除、u2g数据检测、u2g数据干扰消除、第二次解扩和第二次压缩g2u csi估计;所述压缩g2u csi,是指压缩后的地面基站到uav端的信道状态信息;所述第一次解扩,是将接收信号y进行uav端扩频的逆过程,获得第一次解扩矢量;所述第一次压缩g2u csi估计,是指对第一次解扩信号进行关于压缩g2u csi的估计,获得初步压缩g2u csi估计矢量,估计方法选自ls估计、mmse估计、ml估计、map估计、导频辅助估计中的一种或多种;所述压缩g2u csi干扰消除,是指将初步压缩g2u csi估计矢量从接收信号y中减去,获得u2g数据初步矢量;所述u2g数据,是指地面基站端的发送信号中的uav端到地面基站端的用户数据;所述u2g数据检测,是指将u2g数据初步矢量进行关于u2g数据的检测,获得u2g数据初步检测矢量,检测方法选自zf检测、mmse检测、最大似然检测中的一种或多种;所述压缩u2g数据干扰消除,是指将u2g数据初步检测矢量从接收信号y中减去,获得干扰消除后的压缩g2u csi矢量;所述第二次解扩,是指将干扰消除后的压缩g2u csi矢量进行解扩,获得第二次解扩矢量;所述第二次压缩g2u csi估计,是指对第二次解扩信号进行关于压缩g2u csi的估计,获得压缩g2u csi恢复矢量估计方法选自ls估计、mmse估计、ml估计、map估计、导频辅助估计中的一种或多种;所述压缩g2u csi恢复矢量是指地面基站端根据uav端发送信号中的压缩g2u csi矢量z进行恢复后得到的对应压缩g2u csi矢量;s3.根据感知结果w,通过los判决器对压缩g2u csi恢复矢量是否存在los进行判决,得到存在los的压缩g2u csi恢复矢量或不存在los的压缩g2u csi恢复矢量s4.根据存在los的压缩g2u csi恢复矢量通过los辅助网络获得存在los的压缩g2u csi优化矢量s5.将存在los的压缩g2u csi优化矢量或不存在los的压缩g2u csi恢复矢量通过叠加干扰消除恢复得到u2g数据检测矢量所述叠加干扰消除,是指将存在los的压缩g2u csi优化矢量或不存在los的压缩g2u csi恢复矢量从均衡信号中减去,获得u2g数据检测矢量所述均衡信号,是指对接收信号y进行信道均衡处理后获得的信号,信道均衡方法选自
zf均衡、mmse均衡、判决反馈均衡、最大似然均衡、盲均衡中的一种或多种;s6.根据存在los的压缩g2u csi优化矢量或不存在los的压缩g2u csi恢复矢量通过csi恢复网络恢复得到g2u csi重构矢量2.根据权利要求1所述的基于los感知uav毫米波系统的叠加csi反馈方法,其特征在于,步骤s1所述los感知模块包括以下子步骤:s11.根据u2g csi的估计矩阵采用los感知网络获得初步感知结果ω;所述的los感知网络包括:一个含有线性激活函数的输入层、一个含有relu激活函数的卷积层、一个最大池化层、一个展平层、一个含有sigmoid激活函数的全连接输出层;其中,卷积层的卷积核大小为a
×
a,卷积核个数为b,最大池化层的滤波器大小为c
×
c,全连接输出层神经元个数为1,a、b和c分别表示根据工程预设确定的卷积核大小、卷积核个数和最大池化层的滤波器大小;构建训练数据集对los感知网络进行训练,获得los感知网络的网络参数θ
e
;所述的los感知网络训练数据通过对u2g csi的估计矩阵进行实值化获得,即所述的los感知网络训练标签e通过对u2g csi g进行是否存在los的判决获得,即,u2g csi g存在los,则e=1,反之,则e=0;在线运行时,将u2g csi的估计矩阵实值化后输入los感知网络,获得初步感知结果ω;s12.根据初步感知结果ω,通过阈值硬判决器获得感知结果w;其中,阈值硬判决器的阈值为β,阈值硬判决器获得的感知结果w为0或者1,β表示根据工程预设确定的阈值。3.根据权利要求1所述的基于los感知uav毫米波系统的叠加csi反馈方法,其特征在于,步骤s3所述los判决器进一步包括:将压缩g2u csi恢复矢量作为los判决器的输入,los判决器的判决条件为感知结果w;当感知结果w为0时,los判决器的输出为不存在los的压缩g2u csi恢复矢量当感知结果w为1时,los判决器的输出为存在los的压缩g2u csi恢复矢量4.根据权利要求1所述的基于los感知uav毫米波系统的叠加csi反馈方法,其特征在于,步骤s4所述los辅助网络进一步包括:一个含有线性激活函数的输入层、一个含有leakyrelu激活函数的隐藏层和一个含有线性激活函数的输出层;其中,输入层、隐藏层和输出层节点数分别为2n、kn和2n,k表示根据工程预设确定的隐藏层节点系数;以uav端发出的实值化压缩g2u csi矢量为标签,构建训练数据集对los辅助网络进行训练,获得los辅助网络的网络参数θ
z
;所述的los辅助网络训练数据通过对存在los的压缩g2u csi恢复矢量进行实值化获得,即:
所述实值化压缩g2u csi矢量z
label
通过对压缩g2u csi矢量z进行实值化获得,即:z
label
=[re(z),im(z)];在线运行时,将存在los的压缩g2u csi恢复矢量实值化后输入los辅助网络,获得存在los的压缩g2u csi恢复的优化矢量5.根据权利要求1所述的基于los感知uav毫米波系统的叠加csi反馈方法,其特征在于,步骤s6所述csi恢复网络进一步包括:一个含有线性激活函数的输入层、一个含有leakyrelu激活函数的隐藏层和一个含有线性激活函数的输出层;其中,输入层、隐藏层和输出层节点数分别为2n、ql
a
n和2l
a
n,q表示根据工程预设确定的隐藏层节点系数;以uav端发出的实值化g2u csi矢量为标签,存在los的压缩g2u csi优化矢量或实值化的不存在los的压缩g2u csi恢复矢量为训练输入构建训练数据集{h
train
,h
label
}对csi恢复网络进行训练,获得csi恢复网络的网络参数θ
h
;所述实值化的不存在los的压缩g2u csi恢复矢量通过对不存在los的压缩g2u csi恢复矢量进行实值化获得,即:所述实值化g2u csi矢量h
label
通过对g2u csi矢量h进行实值化获得,即,h
label
=[re(h),im(h)];其中,re(
·
)表示取实部,im(
·
)表示取虚部;在线运行时,将存在los的压缩g2u csi优化矢量或实值化的不存在los的压缩g2u csi恢复矢量输入csi恢复网络,获得g2u csi重构矢量
技术总结
本发明公开了基于LoS感知UAV毫米波系统的叠加CSI反馈方法,包括:根据U2GCSI的估计矩阵,通过LoS感知模块获得感知结果;将接收信号进行压缩G2UCSI估计,得到压缩G2UCSI恢复矢量;根据感知结果,通过LoS判决器对压缩G2UCSI恢复矢量进行判决,得到存在或不存在LoS的压缩G2UCSI恢复矢量;根据存在LoS的压缩G2UCSI恢复矢量,通过LoS辅助网络获得存在LoS的压缩G2UCSI优化矢量;将存在LoS的压缩G2UCSI优化矢量或不存在LoS的压缩G2UCSI恢复矢量,通过叠加干扰消除得到U2G数据检测矢量;再通过CSI恢复网络得到G2UCSI重构矢量。与非叠加的CSI反馈相比,本发明节省了UAV发射机的能耗和UAV毫米波系统的带宽占用;与叠加的CSI反馈相比,本发明提高了G2UCSI和U2G数据的重构精度。本发明提高了G2UCSI和U2G数据的重构精度。本发明提高了G2UCSI和U2G数据的重构精度。
技术研发人员:卿朝进 叶青 刘文慧 王子龙 陈金良
受保护的技术使用者:西华大学
技术研发日:2022.07.12
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。