1.本发明涉及航空器技术领域,尤其涉及一种自动装卸货系统及机库。
背景技术:
2.无人物流航空器是一种能够运输货物的无人驾驶航空器,无人物流航空器飞行高度低,不占用民航空域及军用空域,且飞行速度快,起降密度高于传统的有人驾驶物流航空器。无人物流航空器能够根据预先设定的航线执行飞行任务,在航空器起降及巡航的过程中无需人为介入,适合高密度、集群式的物流运输。然而,目前的无人物流航空器仍需要人工装卸货物,人工装卸货物导致物流效率低下,使得无人物流航空器的高密度、集群式的物流运输的发展受到极大的限制。
技术实现要素:
3.为了克服现有技术的不足,本发明的目的在于提供一种自动装卸货系统及机库,以解决目前的仍需通过人工装卸货物而导致物流效率低下的问题。
4.本发明的目的采用如下技术方案实现:
5.一种自动装卸货系统,包括货箱、第一输货机构、供货组件和分拣机构;
6.所述货箱的外侧壁上设有至少一个挂耳;
7.所述第一输货机构包括铺设于地面的第一导轨、可滑动地连接于所述第一导轨的第一滑座以及可转动地设于所述第一滑座上的第一拾取装置,所述第一拾取装置具有至少一个第一挂钩,所述挂耳能够挂接于所述第一挂钩;
8.所述供货组件和分拣机构均与所述第一输货机构相邻设置,所述供货组件用于为所述第一输货机构提供所述货箱,所述分拣机构用于接收所述第一输货机构向其输送的所述货箱。
9.在某些可选地实施例中,所述第一拾取装置包括第一转盘、第一升降轨、第一液压缸和第一叉臂,所述第一转盘可转动地连接于所述第一滑座,所述第一升降轨垂直地固定连接于所述第一转盘,所述第一叉臂的一端可滑动地连接于所述第一升降轨,所述第一叉臂的另一端设有所述第一挂钩,所述第一液压缸的两端分别连接于所述第一转盘和第一叉臂。
10.在某些可选地实施例中,所述第一拾取装置还包括连接于所述第一转盘的第一视觉识别部件,所述第一视觉识别部件对着所述第一叉臂上的第一挂钩设置。
11.在某些可选地实施例中,所述供货组件包括与所述第一输货机构相邻设置的第二输货机构,所述第二输货机构包括铺设于所述地面的第二导轨、可滑动地连接于所述第二导轨的第二滑座以及位于所述第二滑座上的第二拾取装置,所述第一导轨和第二导轨平行设置;所述第二拾取装置具有至少一个第二挂钩,所述挂耳能够挂接于所述第二挂钩。
12.在某些可选地实施例中,所述第二拾取装置包括第二转盘、第二升降轨和第二叉臂,所述第二转盘可转动地连接于所述第二滑座,所述第二升降轨垂直地固定连接于所述
第二转盘,所述第二叉臂的一端可滑动地连接于所述第二升降轨,所述第二叉臂的另一端设有所述第二挂钩。
13.在某些可选地实施例中,所述供货组件包括储货柜,所述储货柜内设有储货腔,所述储货柜的一端设有贯通于所述储货腔的开口,所述开口位于所述第二导轨的一端。
14.在某些可选地实施例中,所述储货腔的内底面设有第一输送带,所述第一输送带延伸至所述开口。
15.在某些可选地实施例中,所述储货腔的内顶面设有第一视觉识别装置和第二视觉识别装置,所述第一视觉识别装置位于所述开口处,所述第二视觉识别装置位于所述储货腔远离所述开口的一端。
16.在某些可选地实施例中,所述分拣机构位于所述第一导轨的一端,所述分拣机构包括机架、多个并列排布且设于所述机架上的输送辊以及多个分拣装置,多个所述分拣装置沿所述输送辊的输送方向依次排布于所述机架,所述分拣装置包括带式输送机以及将所述带式输送机与机架相连接且用于提升或降下所述带式输送机的升降装置,所述带式输送机具有第二输送带,所述第二输送带位于相邻的两个所述输送辊之间,所述第二输送带的输送方向与所述输送辊的输送方向相垂直。
17.为了解决相同的技术问题,本发明还提供了一种机库,包括如上述的自动装卸货系统,所述自动装卸货系统设于所述机库内。
18.相比现有技术,本发明的有益效果在于:
19.第一拾取装置通过第一挂钩与货箱外侧壁上的挂耳相连接,使得货箱能够制作得更高,使航空器有限的空间内可容纳更多的货物,第一拾取装置可相对第一滑座转动,以拾取供货组件上的货箱或将货箱放置在分拣机构上,同时,第一滑座可在第一导轨上滑移,以使第一拾取装置能够运动至航空器的一侧并取放航空器上的货箱,实现自动化装卸货物。
附图说明
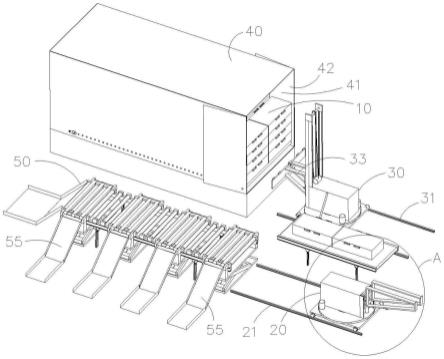
20.图1为发明的自动装卸货系统的整体结构示意图之一;
21.图2为发明的自动装卸货系统的整体结构示意图之二;
22.图3为发明的自动装卸货系统的整体结构示意图之三;
23.图4为图1中a处的放大示意图;
24.图5为图2中b处的放大示意图;
25.图6为图3中c处的放大示意图;
26.图7为发明的自动装卸货系统的储货柜的剖面示意图;
27.图中:10、货箱;11、挂耳;20、第一输货机构;21、第一导轨;22、第一滑座;23、第一拾取装置;231、第一挂钩;232、第一转盘;2321、第一旋转驱动电机;233、第一升降轨;234、第一液压缸;235、第一叉臂;236、第一视觉识别部件;30、第二输货机构;31、第二导轨;32、第二滑座;33、第二拾取装置;331、第二挂钩;332、第二转盘;3321、第二旋转驱动电机;333、第二升降轨;334、第二叉臂;335、第二视觉识别部件;40、储货柜;41、储货腔;42、开口;43、第一输送带;44、第一视觉识别装置;45、第二视觉识别装置;50、分拣机构;51、机架;52、输送辊;53、第二输送带;54、升降装置;55、滑槽。
具体实施方式
28.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳的实施例。但是,本发明可以用许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
29.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
30.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
31.实施例1
32.结合图1至3以及图4所示,示意性地显示了本发明的自动装卸货系统,包括货箱10、第一输货机构20、供货组件和分拣机构50。
33.货箱10为长方体结构,其内部具有容纳腔以收容货物,货箱10的两侧的外侧壁上分别设置有两个挂耳11,挂耳11为u形结构,其两端固定连接在货箱10的外侧壁上,使得货箱10的外侧壁和u形的挂耳11形成一封闭结构。
34.第一输货机构20包括第一导轨21、第一滑座22和第一拾取装置23,第一导轨21的数量设有两个,且两个第一导轨21平行设置,第一导轨21铺设在地面上。第一滑座22上可转动地连接有第一拾取装置23,第一滑座22通过滑轮或滑块等滑动部件可滑动地连接于第一导轨21。在本实施例中,第一滑座22的两侧分别设置有第一驱动轮和第二驱动轮,第一驱动轮连接在其中一个第一导轨21上,第二驱动轮连接在另一个第一导轨21上,第一驱动轮和第二驱动轮可通过电机驱动旋转。第一拾取装置23具有两个平行设置的第一挂钩231,两个第一挂钩231能够分别与货箱10上的两个挂耳11挂接连接。
35.供货组件和分拣机构50均与第一输货机构20相邻设置,供货组件用于为第一输货机构20提供货箱10,分拣机构50用于接收第一输货机构20向其输送的货箱10。供货组件和分拣机构50均位于第一导轨21的其中一端,第一导轨21的另一端为航空器的停泊位置,第一拾取装置23通过第一滑座22和第一导轨21运动至停泊位置旁,即可通过第一挂钩231拾取航空器上的货箱10,第一拾取装置23通过第一滑座22和第一导轨21运动至分拣机构50旁,第一拾取装置23相对第一滑座22转动,以将第一拾取装置23上的货箱10放置在分拣机构50上以进行分拣作业。然后,第一拾取装置23相对第一滑座22转动,以对准供货组件,并将供货组件上的货箱10取下,第一拾取装置23再通过第一滑座22和第一导轨21运动至停泊位置旁,将货箱10放置在航空器上,以实现自动化装卸货,提高了物流效率并降低了人工装卸货的成本。
36.具体地,如图4,第一拾取装置23包括第一转盘232、第一升降轨233、第一液压缸234和第一叉臂235,第一转盘232可转动地连接于第一滑座22,第一转盘232上设置有第一旋转驱动电机2321,第一旋转驱动电机2321上设有第一齿轮,第一滑座22上固定的设有与
第一转盘232的旋转轴线同轴设置的第二齿轮,第一齿轮和第二齿轮啮合,第一旋转驱动电机2321通过第一齿轮和第二齿轮驱动第一转盘232相对第一滑座22转动。第一升降轨233垂直地固定连接于第一转盘232,第一叉臂235的一端可滑动地连接于第一升降轨233,第一叉臂235的另一端设有第一挂钩231,第一液压缸234的两端分别连接于第一转盘232和第一叉臂235,第一液压缸234伸展以驱动第一叉臂235于第一升降轨233向上运动。第一叉臂235向上运动,使得第一挂钩231自下而上勾住挂耳11,而当第一叉臂235向下运动,同时货箱10受其他结构承托停止跟随第一叉臂235向下运动时,第一挂钩231脱离挂耳11。
37.第一滑座22通过第一导轨21前后滑移,可保证第一拾取装置23的运动轨迹始终是稳定的,进而确保货箱10放置的位置足够精准。
38.为了使第一挂钩231准确地与货箱10的挂耳11挂接连接,第一拾取装置23还包括连接于第一转盘232的第一视觉识别部件236,第一视觉识别部件236对着第一叉臂235上的第一挂钩231设置,通过第一视觉识别部件236对第一挂钩231与挂耳11的挂接情况进行识别。
39.实施例2
40.结合图1至5所示,是本实施例的自动装卸货系统,包括货箱10、第一输货机构20、供货组件和分拣机构50。
41.货箱10为长方体结构,其内部具有容纳腔以收容货物,货箱10的两侧的外侧壁上分别设置有两个挂耳11,挂耳11为u形结构,其两端固定连接在货箱10的外侧壁上,使得货箱10的外侧壁和u形的挂耳11形成一封闭结构。
42.第一输货机构20包括第一导轨21、第一滑座22和第一拾取装置23,第一导轨21的数量设有两个,且两个第一导轨21平行设置,第一导轨21铺设在地面上。第一滑座22上可转动地连接有第一拾取装置23,第一滑座22通过滑轮或滑块等滑动部件可滑动地连接于第一导轨21。在本实施例中,第一滑座22的两侧分别设置有第一驱动轮和第二驱动轮,第一驱动轮连接在其中一个第一导轨21上,第二驱动轮连接在另一个第一导轨21上,第一驱动轮和第二驱动轮可通过电机驱动旋转。第一拾取装置23具有两个平行设置的第一挂钩231,两个第一挂钩231能够分别与货箱10上的两个挂耳11挂接连接。
43.供货组件和分拣机构50均与第一输货机构20相邻设置,供货组件用于为第一输货机构20提供货箱10,分拣机构50用于接收第一输货机构20向其输送的货箱10。供货组件和分拣机构50均位于第一导轨21的其中一端,第一导轨21的另一端为航空器的停泊位置,第一拾取装置23通过第一滑座22和第一导轨21运动至停泊位置旁,即可通过第一挂钩231拾取航空器上的货箱10,第一拾取装置23通过第一滑座22和第一导轨21运动至分拣机构50旁,第一拾取装置23相对第一滑座22转动,以将第一拾取装置23上的货箱10放置在分拣机构50上以进行分拣作业。然后,第一拾取装置23相对第一滑座22转动,以对准供货组件,并将供货组件上的货箱10取下,第一拾取装置23再通过第一滑座22和第一导轨21运动至停泊位置旁,将货箱10放置在航空器上,以实现自动化装卸货,提高了物流效率并降低了人工装卸货的成本。
44.具体地,如图4,第一拾取装置23包括第一转盘232、第一升降轨233、第一液压缸234和第一叉臂235,第一转盘232可转动地连接于第一滑座22,第一转盘232上设置有第一旋转驱动电机2321,第一旋转驱动电机2321上设有第一齿轮,第一滑座22上固定的设有与
第一转盘232的旋转轴线同轴设置的第二齿轮,第一齿轮和第二齿轮啮合,第一旋转驱动电机2321通过第一齿轮和第二齿轮驱动第一转盘232相对第一滑座22转动,当然,在其他可选的实施例中,第一转盘232和第一滑座22之间的旋转驱动力还可通过现有的液压马达施加。第一升降轨233垂直地固定连接于第一转盘232,第一叉臂235的一端可滑动地连接于第一升降轨233,第一叉臂235的另一端设有第一挂钩231,第一液压缸234的两端分别连接于第一转盘232和第一叉臂235,第一液压缸234伸展以驱动第一叉臂235于第一升降轨233向上运动。第一叉臂235向上运动,使得第一挂钩231自下而上勾住挂耳11,而当第一叉臂235向下运动,同时货箱10受其他结构承托停止跟随第一叉臂235向下运动时,第一挂钩231脱离挂耳11。
45.第一滑座22通过第一导轨21前后滑移,可保证第一拾取装置23的运动轨迹始终是稳定的,进而确保货箱10放置的位置足够精准。
46.为了使第一挂钩231准确地与货箱10的挂耳11挂接连接,第一拾取装置23还包括连接于第一转盘232的第一视觉识别部件236,第一视觉识别部件236对着第一叉臂235上的第一挂钩231设置,通过第一视觉识别部件236对第一挂钩231与挂耳11的挂接情况进行识别。
47.进一步的,如图5,供货组件包括与第一输货机构20相邻设置的第二输货机构30,第二输货机构30包括第二导轨31、第二滑座32和第二拾取装置33,第二导轨31的数量设有两个,且两个第二导轨31平行设置,第二导轨31铺设在地面上,且第一导轨21和第二导轨31相互平行。第二滑座32上可转动地连接有第二拾取装置33,第二滑座32通过滑轮或滑块等滑动部件可滑动地连接于第二导轨31。在本实施例中,第二滑座32的两侧分别设置有第三驱动轮和第四驱动轮,第三驱动轮连接在其中一个第二导轨31上,第四驱动轮连接在另一个第二导轨31上,第三驱动轮和第四驱动轮可通过电机驱动旋转。第二拾取装置33具有四个平行设置的第二挂钩331,四个第二挂钩331能够分别与两个货箱10上的两个挂耳11挂接连接。
48.第二拾取装置33包括第二转盘332、第二升降轨333和第二叉臂334,第二转盘332可转动地连接于第二滑座32,第二转盘332上设置有第二旋转驱动电机3321,第二旋转驱动电机3321上设有第三齿轮,第二滑座32上固定的设有与第二转盘332的旋转轴线同轴设置的第四齿轮,第三齿轮和第四齿轮啮合,第二旋转驱动电机3321通过第三齿轮和第四齿轮驱动第二转盘332相对第二滑座32转动,当然,在其他可选的实施例中,第二转盘332和第二滑座32之间的旋转驱动力还可通过现有的液压马达施加。第二升降轨333垂直地固定连接于第二转盘332,第二叉臂334的一端可滑动地连接于第二升降轨333,第二叉臂334的另一端设有第二挂钩331,第二叉臂334和第二转盘332之间可通过第二液压缸驱动以实现相对运动,即第二液压缸的两端分别连接于第二转盘332和第二叉臂334,第二液压缸伸展以驱动第二叉臂334于第二升降轨333向上运动。在其他可选的实施例中,还可通过现有的滑轮组件驱动第二叉臂334相对第二转盘332运动。第二叉臂334向上运动,使得第二挂钩331自下而上勾住挂耳11,而当第二叉臂334向下运动,同时货箱10受其他结构承托停止跟随第二叉臂334向下运动时,第二挂钩331脱离挂耳11。
49.为了使第二挂钩331准确地与货箱10的挂耳11挂接连接,第二拾取装置33还包括连接于第二叉臂334的第二视觉识别部件335,第二视觉识别部件335对着第二叉臂334上的
第二挂钩331设置,通过第二视觉识别部件335对第二挂钩331与挂耳11的挂接情况进行识别。
50.第二拾取装置33通过第二导轨31和第二滑座32运动至第二导轨31的其中一端时,第二拾取装置33与远离航空器的第一拾取装置23并列设置,第二拾取装置33相对第二滑座32转动,以将货箱10转交给第一拾取装置23。第二拾取装置33通过第二导轨31和第二滑座32运动至第二导轨31的另一端时,则第二拾取装置33能够从一供货平台上拾取另一个新的货箱10。
51.实施例3
52.结合图1至7所示,是本实施例的自动装卸货系统,包括货箱10、第一输货机构20、供货组件和分拣机构50。
53.货箱10为长方体结构,其内部具有容纳腔以收容货物,货箱10的两侧的外侧壁上分别设置有两个挂耳11,挂耳11为u形结构,其两端固定连接在货箱10的外侧壁上,使得货箱10的外侧壁和u形的挂耳11形成一封闭结构。
54.第一输货机构20包括第一导轨21、第一滑座22和第一拾取装置23,第一导轨21的数量设有两个,且两个第一导轨21平行设置,第一导轨21铺设在地面上。第一滑座22上可转动地连接有第一拾取装置23,第一滑座22通过滑轮或滑块等滑动部件可滑动地连接于第一导轨21。在本实施例中,第一滑座22的两侧分别设置有第一驱动轮和第二驱动轮,第一驱动轮连接在其中一个第一导轨21上,第二驱动轮连接在另一个第一导轨21上,第一驱动轮和第二驱动轮可通过电机驱动旋转。第一拾取装置23具有两个平行设置的第一挂钩231,两个第一挂钩231能够分别与货箱10上的两个挂耳11挂接连接。
55.供货组件和分拣机构50均与第一输货机构20相邻设置,供货组件用于为第一输货机构20提供货箱10,分拣机构50用于接收第一输货机构20向其输送的货箱10。供货组件和分拣机构50均位于第一导轨21的其中一端,第一导轨21的另一端为航空器的停泊位置,第一拾取装置23通过第一滑座22和第一导轨21运动至停泊位置旁,即可通过第一挂钩231拾取航空器上的货箱10,第一拾取装置23通过第一滑座22和第一导轨21运动至分拣机构50旁,第一拾取装置23相对第一滑座22转动,以将第一拾取装置23上的货箱10放置在分拣机构50上以进行分拣作业。然后,第一拾取装置23相对第一滑座22转动,以对准供货组件,并将供货组件上的货箱10取下,第一拾取装置23再通过第一滑座22和第一导轨21运动至停泊位置旁,将货箱10放置在航空器上,以实现自动化装卸货,提高了物流效率并降低了人工装卸货的成本。
56.具体地,如图4,第一拾取装置23包括第一转盘232、第一升降轨233、第一液压缸234和第一叉臂235,第一转盘232可转动地连接于第一滑座22,第一转盘232上设置有第一旋转驱动电机2321,第一旋转驱动电机2321上设有第一齿轮,第一滑座22上固定的设有与第一转盘232的旋转轴线同轴设置的第二齿轮,第一齿轮和第二齿轮啮合,第一旋转驱动电机2321通过第一齿轮和第二齿轮驱动第一转盘232相对第一滑座22转动,当然,在其他可选的实施例中,第一转盘232和第一滑座22之间的旋转驱动力还可通过现有的液压马达施加。第一升降轨233垂直地固定连接于第一转盘232,第一叉臂235的一端可滑动地连接于第一升降轨233,第一叉臂235的另一端设有第一挂钩231,第一液压缸234的两端分别连接于第一转盘232和第一叉臂235,第一液压缸234伸展以驱动第一叉臂235于第一升降轨233向上
运动。第一叉臂235向上运动,使得第一挂钩231自下而上勾住挂耳11,而当第一叉臂235向下运动,同时货箱10受其他结构承托停止跟随第一叉臂235向下运动时,第一挂钩231脱离挂耳11。
57.第一滑座22通过第一导轨21前后滑移,可保证第一拾取装置23的运动轨迹始终是稳定的,进而确保货箱10放置的位置足够精准。
58.为了使第一挂钩231准确地与货箱10的挂耳11挂接连接,第一拾取装置23还包括连接于第一转盘232的第一视觉识别部件236,第一视觉识别部件236对着第一叉臂235上的第一挂钩231设置,通过第一视觉识别部件236对第一挂钩231与挂耳11的挂接情况进行识别。
59.进一步的,如图5,供货组件包括与第一输货机构20相邻设置的第二输货机构30,第二输货机构30包括第二导轨31、第二滑座32和第二拾取装置33,第二导轨31的数量设有两个,且两个第二导轨31平行设置,第二导轨31铺设在地面上,且第一导轨21和第二导轨31相互平行。第二滑座32上可转动地连接有第二拾取装置33,第二滑座32通过滑轮或滑块等滑动部件可滑动地连接于第二导轨31。在本实施例中,第二滑座32的两侧分别设置有第三驱动轮和第四驱动轮,第三驱动轮连接在其中一个第二导轨31上,第四驱动轮连接在另一个第二导轨31上,第三驱动轮和第四驱动轮可通过电机驱动旋转。第二拾取装置33具有四个平行设置的第二挂钩331,两个第二挂钩331能够分别与两个货箱10上的两个挂耳11挂接连接。
60.第二拾取装置33包括第二转盘332、第二升降轨333和第二叉臂334,第二转盘332可转动地连接于第二滑座32,第二转盘332上设置有第二旋转驱动电机3321,第二旋转驱动电机3321上设有第三齿轮,第二滑座32上固定的设有与第二转盘332的旋转轴线同轴设置的第四齿轮,第三齿轮和第四齿轮啮合,第二旋转驱动电机3321通过第三齿轮和第四齿轮驱动第二转盘332相对第二滑座32转动,当然,在其他可选的实施例中,第二转盘332和第二滑座32之间的旋转驱动力还可通过现有的液压马达施加。第二升降轨333垂直地固定连接于第二转盘332,第二叉臂334的一端可滑动地连接于第二升降轨333,第二叉臂334的另一端设有第二挂钩331,第二叉臂334和第二转盘332之间可通过第二液压缸驱动以实现相对运动,即第二液压缸的两端分别连接于第二转盘332和第二叉臂334,第二液压缸伸展以驱动第二叉臂334于第二升降轨333向上运动。在其他可选的实施例中,还可通过现有的滑轮组件驱动第二叉臂334相对第二转盘332运动。第二叉臂334向上运动,使得第二挂钩331自下而上勾住挂耳11,而当第二叉臂334向下运动,同时货箱10受其他结构承托停止跟随第二叉臂334向下运动时,第二挂钩331脱离挂耳11。
61.第二拾取装置33通过第二导轨31和第二滑座32运动至第二导轨31的其中一端时,第二拾取装置33与远离航空器的第一拾取装置23并列设置,第二拾取装置33相对第二滑座32转动,以将货箱10转交给第一拾取装置23。供货组件还包括储货柜40,第二拾取装置33通过第二导轨31和第二滑座32运动至第二导轨31的另一端时,则第二拾取装置33能够从储货柜40上拾取另一个新的货箱10。
62.其中,如图7,储货柜40内设有储货腔41,储货柜40的一端设有贯通于储货腔41的开口42,开口42位于第二导轨31的一端,第二拾取装置33上的第二叉臂334从开口42穿入储货柜40内以拾取货箱10。为了使储货柜40内的多个货箱10均能够被第一叉臂235拾取,储货
腔41的内底面设有第一输送带43,第一输送带43延伸至开口42。同时,储货腔41的内顶面设有第一视觉识别装置44和第二视觉识别装置45,第一视觉识别装置44位于开口42处,第二视觉识别装置45位于储货腔41远离开口42的一端。当靠近储货腔41开口42处的货箱10被第二拾取装置33拾取完后,第一视觉识别装置44识别到此处无货箱10,则第一输送带43运动以将储货腔41内的其他货箱10输送至开口42处,以待第二拾取装置33拾取。
63.而在向储货柜40内放置货箱10时,只需将货箱10放置在靠近开口42处的第一输送带43上,第一输送带43逐渐将货箱10输送至储货腔41远离开口42的一端,第二视觉识别装置45监测到储货腔41远离开口42的一端具有预设数量的货箱10后,则可判断出储货柜40此时装满了货箱10。
64.此外,分拣机构50位于第一导轨21远离航空器的停泊位置的一端,如图6,分拣机构50包括机架51、多个并列排布且设于机架51上的输送辊52以及多个分拣装置,输送辊52用于将货箱10沿第一方向输送。多个分拣装置沿输送辊52的输送方向(即第一方向)依次排布于机架51,分拣装置包括带式输送机以及将带式输送机与机架51相连接且用于提升或降下带式输送机的升降装置54,换句话说,升降装置54能够驱动带式输送机升降,带式输送机具有第二输送带53,第二输送带53沿第二方向设置,即第二输送带53的输送方向为第二方向,第一方向和第二方向相垂直,第二输送带53位于相邻的两个输送辊52之间。当升降装置54驱动带式输送机下降后,货箱10在输送辊52的输送下沿第一方向运动,当升降装置54驱动带式输送机上升后,当货箱10运动至第二输送带53上时,第二输送带53可驱动货箱10沿第二方向运动。每个分拣装置都对应一个滑槽55,滑槽55固定连接在机架51上,且滑槽55与水平面倾斜设置,第二输送带53可将货箱10输送至与该第二输送带53相对应的滑槽55内,实现货箱10的分拣。
65.实施例4
66.为了解决相同的技术问题,本发明还提供了一种机库,包括如上述的自动装卸货系统,自动装卸货系统设于机库内。
67.综上所述,第一拾取装置23通过第一挂钩231与货箱10外侧壁上的挂耳11相连接,使得货箱10能够制作得更高,使航空器有限的空间内可容纳更多的货物,第一拾取装置23可相对第一滑座22转动,以拾取供货组件上的货箱10或将货箱10放置在分拣机构50上,同时,第一滑座22可在第一导轨21上滑移,以使第一拾取装置23能够运动至航空器的一侧并取放航空器上的货箱10,实现自动化装卸货物。
68.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
