技术特征:
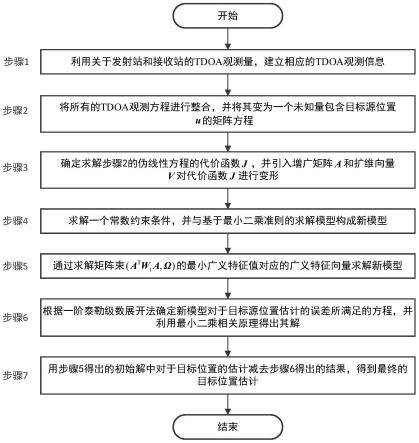
1.一种基于水下多基地声纳的tdoa偏置削减定位方法,其特征在于,包括:步骤1:利用关于m个发射站和n个接收站的相应的tdoa观测量,建立相应的tdoa观测方程;步骤2:将所有的tdoa观测方程进行整合,并将其转变为一个未知量包含水下目标源位置u的伪线性方程;步骤3:确定求解步骤2的伪线性方程的代价函数j,并引入增广矩阵a和扩维向量v对代价函数j进行变形;步骤4:基于变形后的代价函数j求解一个常数约束条件,构建一个未知量包含水下目标源位置u的优化求解模型;步骤5:通过求解矩阵束(a
t
w1a,ω)的最小广义特征值对应的广义特征向量求解步骤4构建的优化求解模型;其中w1表示加权矩阵,ω表示二阶误差相关项;步骤6:根据一阶泰勒级数展开法确定优化求解模型对于目标源位置估计的误差所满足的方程,并利用最小二乘法得出其解;步骤7:基于步骤5和步骤6得到的解得出最终的目标位置估计。2.根据权利要求1所述的一种基于水下多基地声纳的tdoa偏置削减定位方法,其特征在于,所述步骤1中,建立的tdoa观测方程为:其中其中表示声速的先验值,c为声速,σ
c
表示声速对应的先验误差;表示声速对应的先验误差;表示第i个发射站、第j个接收站对应的带有误差的tdoa观测量,τ
ij
表示第i个发射站、第j个接收站对应的tdoa观测量,
△
τ
ij
表示第i个发射站、第j个接收站对应的tdoa观测量误差;ε
ij
=c
△
τ
ij
τ
ij
σ
c
,表示对应的误差值;t
i
表示第i个发射站的位置;s
j
表示第j个接收站的位置;1≤i≤m,m表示发射站的个数;1≤j≤n,j表示接收站的个数。3.根据权利要求2所述的一种基于水下多基地声纳的tdoa偏置削减定位方法,其特征在于,所述步骤2中,伪线性方程为:其中b1表示方程的误差矩阵,ε表示所有ε
ij
构成的向量形式,h1表示观测向量,g1表示观测矩阵,表示方程中的未知量;式中ε=[(ε1)
t (ε2)
t
ꢀ…ꢀ
(ε
m
)
t
]
ttt
其中i
m
表示维度为m的单位矩阵;表示矩阵的kronecker积;b
11
表示有关b1的子对角矩阵;ε
i
表示ε的子向量;h
1i
表示h1的子向量;g
1i
表示g1的子矩阵;其中
b
11
=2diag([||u-s1|| ||u-s2||
ꢀ…ꢀ
||u-s
n
||])ε
i
=[ε
i1 ε
i2
ꢀ…ꢀ
ε
in
]
tt
其中diag(*)表示以向量*中的各项元素为对角的矩阵;ο
i
×
j
表示一个行数为i,列数为j的零矩阵。4.根据权利要求3所述的一种基于水下多基地声纳的tdoa偏置削减定位方法,其特征在于,所述步骤3包括:确定求解步骤2的伪线性方程的代价函数j式中w1表示相应的加权矩阵,表示为e(εε
t
)是有关ε的协方差矩阵,表示为其中q
τ
表示tdoa观测量的误差协方差矩阵;τ表示tdoa观测量的矩阵形式,式中τ=[(τ1)
t (τ2)
t
ꢀ…ꢀ
(τ
m
)
t
]
t
τ
i
=[τ
i1 τ
i2
ꢀ…ꢀ
τ
in
]
t
引入增广矩阵a=[-g
1 h1]和扩维向量将代价函数j变形为j=v
t
a
t
w1av。5.根据权利要求4所述的一种基于水下多基地声纳的tdoa偏置削减定位方法,其特征在于,所述步骤4包括:将增广矩阵a分解为a=a
ο
△
a,其中a
ο
表示增广矩阵a的精确已知部分,
△
a表示a的误差部分,分别表示为a
ο
=[-g
1ο h
1ο
]
△
a=[
‑△
g1ꢀ△
h1]式中表示g1的不含误差项部分,表示h1的不含误差项部分,表示为表示为
△
g1表示g1的误差项部分,
△
h1表示h1的误差项部分,表示为
式中式中
△
h
1i
=d
i1
△
τ
i
d
i2
σ
c
式中d
i1
表示有关
△
τ
i
的误差相关矩阵,d
i2
表示有关σ
c
的误差相关向量,表示为d
i1
=2diag([c||t
i-s1|| c2τ
i1 c||t
i-s2|| c2τ
i2
ꢀ…ꢀ
c||t
i-s
n
|| c2τ
in
])代价函数j变形为j=v
t
(a
ο
△
a)
t
w1(a
ο
△
a)v=v
t
a
οt
w1a
ο
v 2v
t
a
οt
w1△
av v
t
△
a
t
w1△
av然后对代价函数的两边取期望可得e(j)=v
t
a
οt
w1a
ο
v v
t
e(
△
a
t
w1△
a)v其中e(j)表示对代价函数j取期望;将e(j)中的第二项作为一个常数约束条件,构建如下关于的优化求解模型其中ω表示二阶误差相关项,k表示任意常数;式中ω1、ω2和ω3分别表示ω的不同子矩阵,分别表示为
其中ω1(m1:m2,:)表示矩阵ω1的第m1、m2行构成的子矩阵;ω1(m1:m2,n1:n2)表示矩阵的第m1、m2行以及第n1、n2列构成的子矩阵;ω2(m:n)表示向量的第m~n列构成的子向量;ω2(m)表示向量ω2的第m个元素;trace(*)表示矩阵*的迹。6.根据权利要求5所述的一种基于水下多基地声纳的tdoa偏置削减定位方法,其特征在于,所述步骤5中,将优化求解模型关于v的估计结果记为则的估计值表示为7.根据权利要求6所述的一种基于水下多基地声纳的tdoa偏置削减定位方法,其特征在于,所述步骤6包括:根据一阶泰勒级数展开法,中的各个元素表示为中的各个元素表示为表示的估计误差,得出将优化求解模型对于目标源位置估计的误差记为根据上一组等式,可得如下矩阵方程式中h2表示h1关于的转换形式,g2表示g1关于的转换形式,分别表示为
根据最小二乘法,的估计值表示为式中w2表示相应的加权矩阵表示相应的加权矩阵表示的估计协方差矩阵。8.根据权利要求7所述的一种基于水下多基地声纳的tdoa偏置削减定位方法,其特征在于,所述步骤7中,目标源位置的最终估计结果表示为
技术总结
本发明公开一种基于水下多基地声纳的TDOA偏置削减定位方法,首先利用多基地声纳中关于发射站和接收站的到达时间差的观测量,建立观测方程,整合并变形为一个未知量包含目标位置的伪线性矩阵方程,确定求解该方程的代价函数并变形;接着确定一个常数约束条件,并与基于最小二乘准则的求解模型构成新模型,通过求解一个矩阵束的最小广义特征值对应的广义特征向量求解此新模型,得出初始解;然后根据一阶泰勒级数展开法确定新模型对于目标源位置估计的误差方程,并利用最小二乘得出其解;最后用初始解中对目标位置的估计减去估计误差,得出最终目标位置的估计结果。该方法可有效削减在水下声速存在先验误差时多基地声纳TDOA定位方法的偏置。TDOA定位方法的偏置。TDOA定位方法的偏置。
技术研发人员:王鼎 范超 高卫港 尹洁昕 陈灿 李建阳 吴志东 唐涛 张莉 郑娜娥
受保护的技术使用者:中国人民解放军战略支援部队信息工程大学
技术研发日:2022.08.05
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。