技术特征:
1.一种地面点云的分割方法,其特征在于,所述方法包括:获取当前帧的目标点云;对所述目标点云所处的空间区域进行切割,得到多个第一子空间区域;获取前一历史帧对应的多个第二子空间区域以及每个所述第二子空间区域对应的历史地面;在多个所述第二子空间区域中,分别确定每个所述第一子空间区域匹配的所述第二子空间区域;分别根据每个所述第一子空间区域匹配的所述第二子空间区域对应的所述历史地面,对每个所述第一子空间区域包括的子点云进行筛选,得到每个所述第一子空间区域对应的候选点云;分别根据每个所述第一子空间区域对应的所述候选点云,确定每个所述第一子空间区域对应的预估地面;分别根据每个所述第一子空间区域相邻的至少一个所述第一子空间区域对应的所述预估地面,对每个所述第一子空间区域对应的所述预估地面进行调整,得到每个所述第一子空间区域对应的目标地面;分别根据每个所述第一子空间区域对应的所述目标地面,从每个所述第一子空间区域包括的所述子点云中分割出地面点云。2.根据权利要求1所述的方法,其特征在于,所述分别根据每个所述第一子空间区域相邻的至少一个所述第一子空间区域对应的所述预估地面,对每个所述第一子空间区域对应的所述预估地面进行调整,得到每个所述第一子空间区域对应的目标地面的步骤,包括:分别根据每个所述第一子空间区域对应的所述预估地面,确定每个所述第一子空间区域对应的第一法向量,其中,所述第一子空间区域对应的所述第一法向量与所述第一子空间区域对应的所述预估地面垂直;分别根据每个所述第一子空间区域相邻的至少一个所述第一子空间区域对应的所述第一法向量,对每个所述第一子空间区域对应的所述第一法向量进行调整,得到每个所述第一子空间区域对应的第二法向量;分别根据每个所述第一子空间区域对应的所述第二法向量,确定每个所述第一子空间区域对应的所述目标地面,其中,每个所述第一子空间区域对应的所述目标地面与所述第一子空间区域对应的所述第二法向量垂直。3.根据权利要求2所述的方法,其特征在于,所述分别根据每个所述第一子空间区域相邻的至少一个所述第一子空间区域对应的所述第一法向量,对每个所述第一子空间区域对应的所述第一法向量进行调整,得到每个所述第一子空间区域对应的第二法向量的步骤,包括:分别将每个所述第一子空间区域对应的所述第一法向量与所述第一子空间区域各自相邻的至少一个所述第一子空间区域对应的所述第一法向量按照所述第一法向量各自对应的权重进行加权平均计算,得到所述第一子空间区域对应的所述第二法向量;其中,所述第一法向量对应的所述第一子空间区域与采集所述目标点云的目标传感器的距离越大,所述第一法向量对应的所述权重越小。4.根据权利要求3所述的方法,其特征在于,所述方法还包括:
按照如下公式确定所述第一法向量对应的所述权重:β=kr
center-α
,其中,β为所述第一法向量对应的所述权重,k为预设的比例系数,r
center
为所述第一法向量对应的所述第一子空间区域的中心到采集所述目标点云的目标传感器中心的距离值,α与所述目标传感器的采集精度相关。5.根据权利要求2所述的方法,其特征在于,所述目标点云所处的空间区域在真实地面上的垂直投影为第一矩形,多个所述第一子空间区域在所述真实地面上的垂直投影均为第二矩形,多个所述第二矩形呈阵列排布且多个所述第二矩形构成所述第一矩形;所述分别根据每个所述第一子空间区域相邻的至少一个所述第一子空间区域对应的所述第一法向量,对每个所述第一子空间区域对应的所述第一法向量进行调整,得到每个所述第一子空间区域对应的第二法向量的步骤,包括:分别根据每个所述第一子空间区域的八邻域内所有的所述第一子空间区域对应的所述第一法向量,对每个所述第一子空间区域对应的所述第一法向量进行调整,得到每个所述第一子空间区域对应的所述第二法向量。6.根据权利要求1所述的方法,其特征在于,所述分别根据每个所述第一子空间区域对应的所述目标地面,从每个所述第一子空间区域包括的所述子点云中分割出地面点云的步骤,包括:分别确定每个所述第一子空间区域包括的所述子点云中的每个点到所述第一子空间区域各自对应的所述目标地面的距离;响应于所述点对应的所述距离小于或者等于所述点所在的所述第一子空间区域对应的第一阈值,确定所述点是所述第一子空间区域中的地面点。7.根据权利要求6所述的方法,其特征在于,所述第一子空间区域与采集所述目标点云的目标传感器的距离越大,所述第一子空间区域对应的第一阈值越大。8.根据权利要求7所述的方法,其特征在于,所述方法还包括:按照如下公式确定所述第一子空间区域对应的所述第一阈值;h=k
h
×
max(1.0,r
centerα
),其中,h为所述第一子空间区域对应的所述第一阈值,k
h
为预设的分割阈值参数,r
center
为所述第一子空间区域的中心到采集所述目标点云的目标传感器中心的距离值,α与所述目标传感器的采集精度相关。9.根据权利要求1所述的方法,其特征在于,在所述获取前一历史帧对应的多个第二子空间区域以及每个所述第二子空间区域对应的历史地面之前,还包括:判断所述当前帧是否是初始帧;响应于所述当前帧不是初始帧,执行所述获取前一历史帧对应的多个第二子空间区域以及每个所述第二子空间区域对应的历史地面的步骤;否则,分别对每个所述第一子空间区域包括的所述子点云进行平面拟合,得到每个所述第一子空间区域对应的所述预估地面,然后执行所述分别根据每个所述第一子空间区域相邻的至少一个所述第一子空间区域对应的所述预估地面,对每个所述第一子空间区域对应的所述预估地面进行调整,得到每个所述第一子空间区域对应的目标地面的步骤。10.根据权利要求1所述的方法,其特征在于,所述分别根据每个所述第一子空间区域匹配的所述第二子空间区域对应的所述历史地面,对每个所述第一子空间区域包括的子点云进行筛选,得到每个所述第一子空间区域对应的候选点云的步骤,包括:
分别从每个所述第一子空间区域包括的所述子点云中,筛选出到所述第一子空间区域各自对应的所述历史地面的距离不超过第二阈值的点,得到每个所述第一子空间区域对应的所述候选点云。11.根据权利要求9所述的方法,其特征在于,所述在多个所述第二子空间区域中,分别确定每个所述第一子空间区域匹配的所述第二子空间区域的步骤,包括:分别确定每个所述第二子空间区域与每个所述第一子空间区域的重叠度;在每个所述第一子空间区域对应的所述重叠度中,确定最大重叠度;分别将每个所述第一子空间区域对应的所述最大重叠度对应的所述第二子空间区域,确定为所述第一子空间区域各自匹配的所述第二子空间区域。12.根据权利要求11所述的方法,其特征在于,所述方法还包括:响应于所述第一子空间区域对应的所述最大重叠度不为零,将所述第一子空间区域对应的所述最大重叠度对应的所述第二子空间区域,确定为所述第一子空间区域匹配的所述第二子空间区域;否则,将距离所述第一子空间区域最近的所述第二子空间区域,确定为所述第一子空间区域匹配的所述第二子空间区域。13.根据权利要求1所述的方法,其特征在于,在所述对所述目标点云所处的空间区域进行切割,得到多个第一子空间区域之前,还包括:分别判断所述目标点云中的各个点是否处于感兴趣空间区域;响应于所述点不处于所述感兴趣空间区域,将所述点从所述目标点云中去除。14.根据权利要求13所述的方法,其特征在于,所述方法还包括:响应于所述点对应的坐标中的第一分量、第二分量、第三分量分别处于所述点对应的第一范围、第二范围、第三范围,确定所述点处于所述感兴趣空间区域;其中,所述第三分量与垂直于真实地面的方向一致,且所述第三范围的最小值小于零,所述第三范围的最大值大于零,且所述点与采集所述目标点云的目标传感器的距离越大,所述点对应的所述第三范围越宽。15.根据权利要求14所述的方法,其特征在于,所述方法还包括:按照如下公式确定所述点对应的所述第三范围的最小值z1:z1=z
min
×
max(1.0,r
α
);以及,按照如下公式确定所述点对应的所述第三范围的最大值z2:z2=z
max
×
max(1.0,r
α
);其中,z
min
为第一预设阈值、z
max
为第二预设阈值,r为所述点到采集所述目标点云的目标传感器中心的距离值,α与所述目标传感器的采集精度相关。16.根据权利要求13所述的方法,其特征在于,在所述响应于所述点不处于所述感兴趣空间,将所述点从所述目标点云中去除之后,还包括:对所述目标点云中的点进行滤波处理。17.一种分割装置,其特征在于,所述分割装置包括处理器、存储器以及通信电路,所述处理器分别耦接所述存储器、所述通信电路,所述存储器中存储有程序数据,所述处理器通过执行所述存储器内的所述程序数据以实现如权利要求1-16任一项所述方法中的步骤。18.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程
序,所述计算机程序能够被处理器执行以实现如权利要求1-16任一项所述方法中的步骤。
技术总结
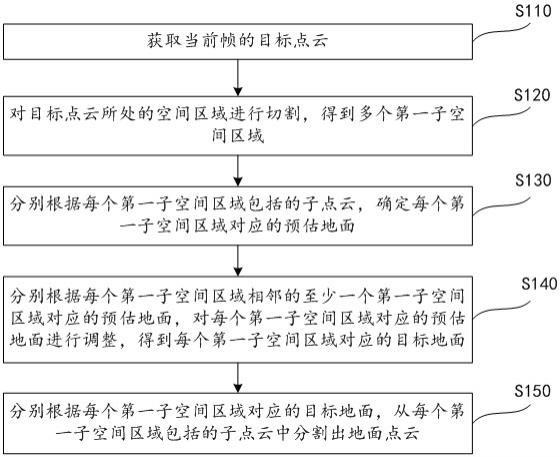
本申请公开了一种地面点云的分割方法、装置及计算机可读存储介质,该分割方法包括:获取当前帧的目标点云;对目标点云所处的空间区域进行切割,得到多个第一子空间区域;分别根据每个第一子空间区域包括的子点云,确定每个第一子空间区域对应的预估地面;分别根据每个第一子空间区域相邻的至少一个第一子空间区域对应的预估地面,对每个第一子空间区域对应的预估地面进行调整,得到每个第一子空间区域对应的目标地面;分别根据每个第一子空间区域对应的目标地面,从每个第一子空间区域包括的子点云中分割出地面点云。本申请所提供的分割方法能够提高地面点云的分割精度。方法能够提高地面点云的分割精度。方法能够提高地面点云的分割精度。
技术研发人员:葛科迪 汪鹏飞 马子昂 刘征宇 谢运
受保护的技术使用者:杭州华橙软件技术有限公司
技术研发日:2022.10.25
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。