技术特征:
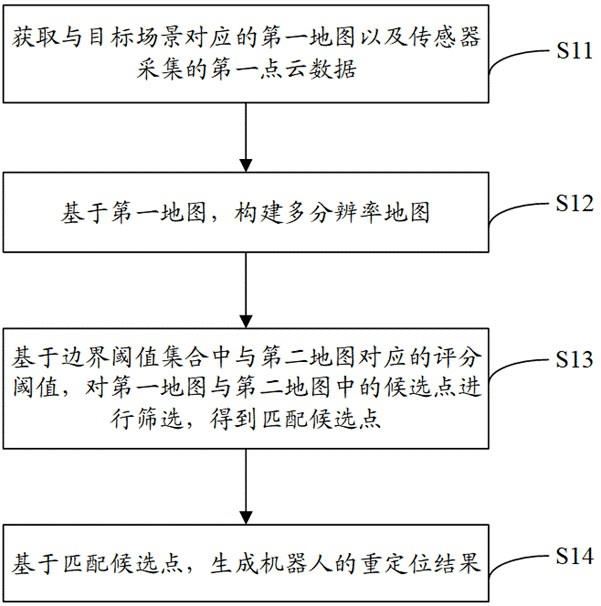
1.一种机器人重定位方法,其特征在于,应用于目标场景中的机器人,所述机器人包括传感器,所述方法包括:获取与所述目标场景对应的第一地图以及所述传感器采集的第一点云数据;基于所述第一地图,构建多分辨率地图,所述多分辨率地图包括第一地图与至少一个第二地图,所述第一地图的分辨率大于所有所述第二地图的分辨率;基于边界阈值集合中与第二地图对应的评分阈值,对所述第一地图与所述第二地图中的候选点进行筛选,得到匹配候选点;基于所述匹配候选点,生成所述机器人的重定位结果;其中,所述第二地图的数量小于所述多分辨率地图的最大分层数量。2.根据权利要求1所述的机器人重定位方法,其特征在于,所述基于所述第二地图对应的评分阈值,对所述第一地图与所述第二地图中的候选点进行筛选,得到匹配候选点的步骤,包括:从所述多分辨率地图中选出当前层地图;从所述当前层地图中取出当前候选点,计算当前候选点的评分;基于所述当前候选点的评分与所述当前层地图的评分阈值,判断是否访问下一层候选点,所述下一层候选点为下一层地图中与所述当前候选点对应的候选点;若是,则计算所述下一层候选点的评分;将所述当前候选点更新为所述下一层候选点,将所述当前层地图更新为所述下一层地图,并返回所述基于所述当前候选点的评分与所述当前层地图的评分阈值,判断是否访问下一层候选点的步骤,直至对所述多分辨率地图遍历完毕,以生成所述匹配候选点。3.根据权利要求2所述的机器人重定位方法,其特征在于,所述计算当前候选点的评分的步骤,包括:基于所述当前候选点,对所述第一点云数据进行变换处理,得到第二点云数据;将所述第二点云数据与所述当前层地图进行匹配,得到所述当前候选点的评分。4.根据权利要求2所述的机器人重定位方法,其特征在于,所述基于所述当前候选点的评分与所述当前层地图的评分阈值,判断是否访问下一层候选点的步骤,包括:判断所述当前候选点的评分是否大于或等于所述当前层地图的评分阈值;若是,则确定访问所述下一层候选点。5.根据权利要求2所述的机器人重定位方法,其特征在于,所述基于所述当前候选点的评分与所述当前层地图的评分阈值,判断是否访问下一层候选点的步骤之前,包括:判断所述当前层地图的层号是否大于第一预设值;若是,则所述当前层地图的评分阈值为第一最高评分;若否,则所述当前层地图的评分阈值为第二最高评分;其中,所述第一最高评分为所述第一地图中已访问过的候选点中评分的最大值,所述第二最高评分为参考层中已访问过的候选点中评分的最大值,所述参考层的层号与所述当前层的层号的差值为第二预设值,且所述参考层的层号小于所述当前层的层号。6.根据权利要求2所述的机器人重定位方法,其特征在于,所述匹配候选点包括第一匹配候选点与第二匹配候选点,所述基于所述匹配候选点,生成所述机器人的重定位结果的步骤,包括:
在所述当前层地图的层号为第三预设值时,判断所述当前候选点的评分是否大于第一评分阈值;若是,则将所述当前候选点确定为粗匹配候选点并存储;在所述当前层地图的层号为第四预设值时,判断所述当前候选点的评分是否大于第二评分阈值;若是,则将所述当前候选点确定为精匹配候选点并存储;分别对所述粗匹配候选点与所述精匹配候选点进行筛选处理,得到所述第一匹配候选点与所述第二匹配候选点;基于所述第一匹配候选点与所述第二匹配候选点,生成所述重定位结果。7.根据权利要求6所述的机器人重定位方法,其特征在于,所述基于所述第一匹配候选点与所述第二匹配候选点,生成所述重定位结果的步骤,包括:对所述第一匹配候选点与所述第二匹配候选点进行合并处理,得到合并结果;判断所述合并结果中是否为空;在所述合并结果中为空时,判定重定位失败;在所述合并结果不为空时,判定所述合并结果中第一有效候选点的数量是否为第一预设数量;若是,则将所述第一有效候选点的位姿确定为所述重定位结果;若否,则对所述合并结果进行处理,得到所述重定位结果。8.根据权利要求7所述的机器人重定位方法,其特征在于,所述对所述合并结果进行处理,得到所述重定位结果的步骤,包括:获取所述机器人所处的当前重定位点的编号,并判断所述编号是否为第五预设值;若否,则获取历史量测粒子,基于所述获取历史量测粒子,生成所述重定位结果。9.根据权利要求8所述的机器人重定位方法,其特征在于,所述基于所述获取历史量测粒子,生成所述重定位结果的步骤,包括:基于其他传感器信息与所述历史量测粒子,生成第一预测粒子;对所述第一预测粒子进行筛选,得到第二预测粒子;对所述第二预测粒子进行聚簇,以生成预测粒子簇;基于所述预测粒子簇,生成质心粒子;对所述质心粒子与对应的历史量测粒子进行合并,生成第一量测粒子;计算所述第一量测粒子的最大权重,并基于所述最大权重,对所述第一量测粒子进行筛选,得到第二量测粒子;基于所述第二量测粒子,生成所述重定位结果。10.根据权利要求9所述的机器人重定位方法,其特征在于,所述对所述质心粒子与对应的历史量测粒子进行合并,生成第一量测粒子的步骤,包括:对所述质心粒子的权重以及与所述质心粒子对应的历史量测粒子的权重进行叠加,以更新所述质心粒子的权重;将所述历史量测粒子删除,并将所述质心粒子确定为所述第一量测粒子。11.根据权利要求9所述的机器人重定位方法,其特征在于,所述基于所述最大权重,对所述第一量测粒子进行筛选,得到第二量测粒子的步骤,包括:判断所述第一量测粒子的权重是否大于第二权重阈值;若是,则将所述第一量测粒子确定为所述第二量测粒子;
所述基于所述第二量测粒子,生成所述重定位结果的步骤,包括:判断所述第二量测粒子的数量是否为第二预设数量;若是,则将所述最大权重对应的第二量测粒子的位姿确定为所述重定位结果。12.根据权利要求9所述的机器人重定位方法,其特征在于,所述对所述第一预测粒子进行筛选,得到第二预测粒子的步骤,包括:计算所述第一预测粒子的权重,并判断所述第一预测粒子的权重是否大于或等于第一权重阈值;若是,则将所述第一预测粒子确定为所述第二预测粒子;若否,则将所述第一预测粒子删除。13.根据权利要求12所述的机器人重定位方法,其特征在于,所述计算所述第一预测粒子的权重的步骤,包括:获取所述当前重定位点的所有第一有效候选点中与所述第一预测粒子的距离最近的第一有效候选点,得到第二有效候选点;基于所述第二有效候选点与所述第一预测粒子,计算出所述第一预测粒子的权重。14.根据权利要求8所述的机器人重定位方法,其特征在于,所述方法还包括:判断所述编号是否达到重定位次数阈值;若是,则确定重定位失败;若否,将所述编号与第六预设值叠加,以对所述编号进行更新,将所述当前重定位点更新为下一重定位点,并返回所述获取所述机器人所处的当前重定位点的编号的步骤。15.根据权利要求2所述的机器人重定位方法,其特征在于,所述方法还包括:基于所述候选点的评分,对所述边界阈值集合进行更新。16.一种机器人,其特征在于,包括互相连接的存储器和处理器,其中,所述存储器用于存储计算机程序,所述计算机程序在被所述处理器执行时,用于实现权利要求1-15中任一项所述的机器人重定位方法。17.一种计算机可读存储介质,用于存储计算机程序,其特征在于,所述计算机程序在被处理器执行时,用于实现权利要求1-15中任一项所述的机器人重定位方法。
技术总结
本申请公开了一种机器人重定位方法、机器人和计算机可读存储介质,该方法应用于目标场景中的机器人,机器人包括传感器,该方法包括:获取与目标场景对应的第一地图以及传感器采集的第一点云数据;基于第一地图,构建多分辨率地图,多分辨率地图包括第一地图与至少一个第二地图,边界阈值集合包括与第二地图对应的评分阈值;基于边界阈值集合中与第二地图对应的评分阈值,对第一地图与第二地图中的候选点进行筛选,得到匹配候选点;基于匹配候选点,生成机器人的重定位结果;第二地图的数量小于多分辨率地图的最大分层数量。通过上述方式,本申请能够提升重定位的效率。申请能够提升重定位的效率。申请能够提升重定位的效率。
技术研发人员:何洪磊 马子昂 涂曙光 刘征宇
受保护的技术使用者:杭州华橙软件技术有限公司
技术研发日:2022.10.25
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。