1.本发明涉及雷达信号处理的技术领域,具体涉及一种基于交通毫米波雷达点云数据的聚类方法。
背景技术:
2.在交通场景下,毫米波雷达对运动目标的追踪一般分为聚类和追踪两个部分,其中点云数据聚类后的输出点作为后续目标跟踪模块的输入,因此,点云目标聚类效果的优劣对于后续跟踪效果有巨大影响。
3.目前在交通道路场景中,毫米波雷达点云数据呈现两个特点:稀疏性和目标数量不确定性。这就决定了,基于密度的聚类算法(如dbscan)较为适合该场景。然而,在实际道路场景中,点云数据的特点表现为:小目标,远距离的目标只有少量点甚至只有一个点,大目标的反射点数量多,但是分布范围很散,并且,对于同一个目标,由于其不同位置的rcs不同,不同位置的点云密度也不相同。因此,若仅进行帧内聚类,参数minpts设置为1,会将噪声点判断为目标,而将参数minpts值设置为大于等于2的值,则会将只有一个反射点的目标当做噪声点去除,这都会造成后续跟踪目标的效果变差。
4.综上所述,单独使用dbscan算法仅对点云数据进行帧内聚类很难获得较好效果,如何提升点云聚类效果,为追踪模块提供较好的点迹数据,是本领域亟需解决的问题。
技术实现要素:
5.针对现有技术的不足,本发明旨在提供一种基于交通毫米波雷达点云数据的聚类方法,实现了:
6.1、针对交通场景下车辆点云数据形状呈矩形状态,将原始的dbscan圆形扩展邻域改进为矩形扩展邻域,可以更准确的将同一个目标点的数据聚类为一簇。
7.2、针对交通场景下的小目标,远距离目标和大目标所出现的问题,本发明先进行帧内聚类,再进行帧间聚类,可以有效解决小目标在较远距离时没有轨迹,大目标近距离时目标分裂这两个难题,提升了点云数据聚类的质量,从而提升目标追踪的质量。
8.为了实现上述目的,本发明采用如下技术方案:
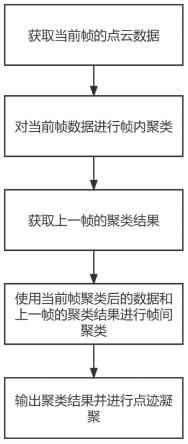
9.一种基于交通毫米波雷达点云数据的聚类方法,所述方法包括以下步骤:
10.s1获取当前帧的点云数据;
11.s2对当前帧数据进行帧内dbscan处理;
12.s3获取上一帧的聚类结果;
13.s4使用当前帧的聚类结果和上一帧的聚类结果进行帧间聚类;
14.s5输出聚类结果并进行点迹凝聚。
15.需要说明的是,在所述步骤s1中,还包括:
16.s1.1获取当前帧点云的原始目标点数据{pi},i=1,2,3,
…
,n,其中n为原始目标点数量,每个目标点的信息包括pi={ri,vi,θi,fi},ri为目标的距离信息,vi为目标的速度
信息,θi为目标的角度信息,fi为目标的帧号信息;
17.s1.2:将上述点迹数据转化到直角坐标系得到p
′i={ri,xi,yi,vi,θi,fi},其中,xi和yi分别是原始点迹在直角坐标系下的位置信息;
18.xi=ri*cosθi,yi=ri*sinθi。
19.需要说明的是,在所述步骤s2中,还包括确定帧内聚类中的参数:矩形邻域参数纵向距离eps_rx1、横向距离eps_ry1和速度差阈eps_v1,以及每个簇中包含的最小点数minpts1=1;其中,对回波数据中的速度进行观察,发现同一个目标的速度差异很小,因此将速度参数引入,设置速度差阈值eps_v1,更好的对回波目标进行聚类;
20.初始化聚类簇数k1=0,未访问样本集合γ1=p
′
,簇划分集,簇划分集
21.点迹数据经过dbscan算法处理,将它们划分到各簇,得到簇划分集c={c1,c2,
…
,ck},根据每个簇的样本点,对该簇求质心,以质心信息si代替各簇点云信息,代替各簇点云信息,得到簇质心信息集合s={s1,s2,s3,
…
,sk}。
22.需要说明的是,根据交通中车辆的回波数据呈矩形分布,使邻域在扩展时尽可能避免相邻车道的车辆聚成一个目标或者将超长车聚类成两个目标。
23.需要说明的是,在所述步骤s2中,还包括:
24.s3.1获取前一帧数据的簇质心数据信息s
′
={s
′1,s
′2,s
′3,
…
,s
′k},与当前帧的簇质心数据进行帧间聚类;
25.s3.2确定帧间聚类中的参数:矩形邻域参数eps_rx2,eps_ry2,eps_v2,以及每个簇中包含的最小点数minpts2=2,这样可以将帧内聚类时保留的噪声点去除掉,仅保留有前后帧联系的点迹数据;
26.s3.3将同帧同簇的样本点分别进行点迹凝聚,得到最终的当前帧簇质心信息。
27.需要说明的是,所述步骤s3.3中,还包括:
28.对帧间聚类后各簇划分集c
‘
={c
’1,c
‘2,
…
,c’k
}中各簇样本点进行点迹凝聚,在每簇中选出当前帧帧号的样本点对其进行点迹凝聚,凝聚后的质心信息为:si={ri,xi,yi,vi,θi,f
now
},i=1,2,3,
…
,k.k为划分簇的数量,f
now
为当前帧帧号;其中:
[0029][0030][0031][0032][0033]
[0034]
本发明的有益效果在于:本发明首先设置dbscan参数minpts为1,以保证小目标在远距离时,回波目标点只有一个,不会被当作噪声去除,但这样又会造成将单个噪声点也当作目标点以及大目标近距离时点云数据较为分散,从而造成大目标分裂的情况。因此,再取出上一帧的聚类后数据与当前帧数据进行帧间聚类,设置参数minpts为2,以去除噪声点,并且,有上下帧之间的联系后,若大目标在近距离时突然出现分裂,即出现新的目标,而前一帧却没有该目标的聚类信息,则可将分裂出来的点迹当作噪声去除。这样就解决了小目标远距离时没有轨迹,大目标近距离时目标分裂两个难题,提升了点云数据聚类的质量,从而提升目标追踪的质量。
附图说明
[0035]
图1为实施例中的一种基于毫米波雷达点云数据的聚类方法流程图;
[0036]
图2为真实环境的图像;
[0037]
图3为帧内聚类时,参数minpts设置为1时的聚类结果;
[0038]
图4为帧间聚类时,参数minpts设置为2时的聚类结果;
[0039]
图5为帧内聚类和帧间聚类相结合时得到的聚类结果。
具体实施方式
[0040]
以下将对本发明作进一步的描述,需要说明的是,以下实施例以本技术方案为前提,给出了详细的实施方式和具体的操作过程,但本发明的保护范围并不限于本实施例。
[0041]
本发明为一种基于交通毫米波雷达点云数据的聚类方法,所述方法包括以下步骤:
[0042]
s1获取当前帧的点云数据;
[0043]
s2对当前帧数据进行帧内dbscan处理;
[0044]
s3获取上一帧的聚类结果;
[0045]
s4使用当前帧的聚类结果和上一帧的聚类结果进行帧间聚类;
[0046]
s5输出聚类结果并进行点迹凝聚。
[0047]
进一步的,本发明在所述步骤s1中,还包括:
[0048]
s1.1获取当前帧点云的原始目标点数据{pi},i=1,2,3,
…
,n,其中n为原始目标点数量,每个目标点的信息包括pi={ri,vi,θi,fi},ri为目标的距离信息,vi为目标的速度信息,θi为目标的角度信息,fi为目标的帧号信息;
[0049]
s1.2:将上述点迹数据转化到直角坐标系得到p
′i={ri,xi,yi,vi,θi,fi},其中,xi和yi分别是原始点迹在直角坐标系下的位置信息;
[0050]
xi=ri*cosθi,yi=ri*sinθi。
[0051]
进一步的,本发明在所述步骤s2中,还包括确定帧内聚类中的参数:矩形邻域参数纵向距离eps_rx1、横向距离eps_ry1和速度差阈eps_v1,以及每个簇中包含的最小点数minpts1=1;其中,对回波数据中的速度进行观察,发现同一个目标的速度差异很小,因此将速度参数引入,设置速度差阈值eps_v1,更好的对回波目标进行聚类;
[0052]
初始化聚类簇数k1=0,未访问样本集合γ1=p
′
,簇划分集c=
[0053]
点迹数据经过dbscan算法处理,将它们划分到各簇,得到簇划分集c={c1,c2,
…
,ck
},根据每个簇的样本点,对该簇求质心,以质心信息si代替各簇点云信息,代替各簇点云信息,得到簇质心信息集合s={s1,s2,s3,
…
,sk}。
[0054]
需要说明的是,根据交通中车辆的回波数据呈矩形分布,使邻域在扩展时尽可能避免相邻车道的车辆聚成一个目标或者将超长车聚类成两个目标。
[0055]
进一步的,本发明在所述步骤s2中,还包括:
[0056]
s3.1获取前一帧数据的簇质心数据信息s
′
={s
′1,s
′2,s
′3,
…
,s
′k},与当前帧的簇质心数据进行帧间聚类;
[0057]
s3.2确定帧间聚类中的参数:矩形邻域参数eps_rx2,eps_ry2,eps_v2,以及每个簇中包含的最小点数minpts2=2,这样可以将帧内聚类时保留的噪声点去除掉,仅保留有前后帧联系的点迹数据;
[0058]
s3.3将同帧同簇的样本点分别进行点迹凝聚,得到最终的当前帧簇质心信息。
[0059]
进一步的,本发明的所述步骤s3.3中,还包括:
[0060]
对帧间聚类后各簇划分集c
‘
={c
’1,c
‘2,
…
,c’k
}中各簇样本点进行点迹凝聚,在每簇中选出当前帧帧号的样本点对其进行点迹凝聚,凝聚后的质心信息为:si={ri,xi,yi,vi,θi,f
now
},i=1,2,3,
…
,k.k为划分簇的数量,f
now
为当前帧帧号;其中:
[0061][0062][0063][0064][0065]
实施例1
[0066]
下面将通过实施例1进一步陈述本发明的有效性。
[0067]
步骤1,获取当前帧数据。
[0068]
步骤1-1:获取当前帧点云的原始目标点数据{pi},i=1,2,3,
…
,n,其中n为原始目标点数量,每个目标点的信息包括pi={ri,vi,θi,fi},ri为目标的距离信息,vi为目标的速度信息,θi为目标的角度信息,fi为目标的帧号信息。
[0069]
步骤1-2:将上述点迹数据转化到直角坐标系得到p
′i={ri,xi,yi,vi,θi,fi},其中,xi和yi分别是原始点迹在直角坐标系下的位置信息。
[0070]
xi=ri*cosθi,yi=ri*sinθi[0071]
步骤2,进行帧内聚类并作点迹凝聚。
[0072]
步骤2-1:确定帧内聚类中的参数:矩形邻域参数eps_rx1,eps_ry1,eps_v1,以及每个簇中包含的最小点数minpts1=1,以避免只有目标只有一个回波数据时被判断为噪声点。
[0073]
步骤2-2:初始化聚类簇数k1=0,未访问样本集合γ1=p
′
,簇划分集
[0074]
步骤2-3:点迹数据经过dbscan算法处理,将它们划分到各簇,得到簇划分集c={c1,c2,
…
,ck},根据每个簇的样本点,对该簇求质心,以质心信息si代替各簇点云信息,代替各簇点云信息,得到簇质心信息集合s={s1,s2,s3,
…
,sk}。
[0075]
步骤3,获取前一帧的聚类后质心数据与当前帧聚类结果作帧间聚类。
[0076]
步骤3-1:获取前一帧数据的簇质心数据信息s
′
={s
′1,s
′2,s
′3,
…
,s
′k},与当前帧的簇质心数据进行帧间聚类。
[0077]
步骤3-2:确定帧间聚类中的参数:矩形邻域参数eps_rx2,eps_ry2,eps_v2,以及每个簇中包含的最小点数minpts2=2,这样可以将帧内聚类时保留的噪声点去除掉,仅保留有前后帧联系的点迹数据。
[0078]
步骤4:将同帧同簇的样本点分别进行点迹凝聚,得到最终的当前帧簇质心信息。对帧间聚类后各簇划分集c
‘
={c
’1,c
‘2,
…
,c’k
}中各簇样本点进行点迹凝聚,在每簇中选出当前帧帧号的样本点对其进行点迹凝聚,凝聚后的质心信息为:si={ri,xi,yi,vi,θi,f
now
},i=1,2,3,
…
,k.k为划分簇的数量,f
now
为当前帧帧号。其中:
[0079][0080][0081][0082][0083][0084]
如图2至图5所示的具体实施例中,图2为真实环境的图像,图3,图4分别是仅进行帧内聚类时,参数minpts设为1和2的聚类效果,图5为本技术实施例的效果。需要说明的是,本技术例采用的数据是500帧连续雷达点云数据,并且是对机动目标进行聚类,因此前期数据处理已将静止点云筛除。本发明可以对每帧的目标均进行准确聚类,而仅进行帧内聚类时,参数minpts设为1使得4号车出现目标分裂的现象,参数minpts设置为2,则又会导致1,3两个小目标车辆在远距离时被当作噪声点去除。通过对比,很明显本发明比仅进行帧内聚类的效果要好。
[0085]
dbscan虽然可以聚类任意形状的点云数据,但是在交通场景下,机动车辆的点云数据一般呈现矩形状。本发明充分考虑车辆点云数据分布状态,使用矩形邻域对点云数据进行聚类,可以尽量避免相邻小目标车辆被聚类为一个簇或者大目标车辆被聚类为多个簇。
[0086]
对于本领域的技术人员来说,可以根据以上的技术方案和构思,给出各种相应的改变和变形,而所有的这些改变和变形,都应该包括在本发明权利要求的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
