技术特征:
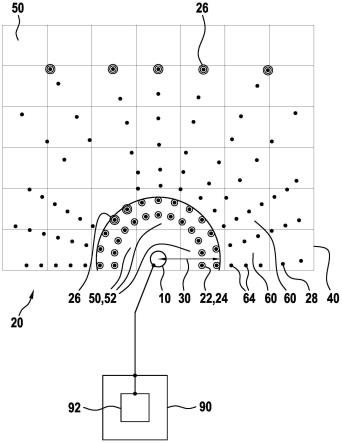
1.用于处理代表环境的三维点云的方法,所述方法包括以下步骤:-接收基于传感器(10)所求取的三维点云(20),-求取所述三维点云(20)内的起始地面点(22),其中,所述三维点云(20)的这样的点被分类为所述起始地面点(22):这些点相对于所述传感器(10)处于第一预定义距离(30)内并且相对于参考平面(40)符合至少一个预定义地面点标准,其中,所述参考平面(40)是相对于所述传感器(10)预定义的平面并且尤其是代表地面的平面,-将所述参考平面(40)的至少一个部分区域划分为多个单元(50),并且求取所述三维点云(20)的与这些单元中的每个单元相对应的点,其中,与各个单元(50)相对应的点是在垂直地向所述参考平面(40)上的投影中被对应的单元(50)包围的点,-将具有第一预定义最小数量的相对应的起始地面点(22),尤其是至少三个起始地面点(22)的那些单元(50)确定为起始单元(52),-为每个起始单元(52)求取单元平面(54),其中,这样求取所述单元平面(54),使得该单元平面根据预定义计算规则接近对应的起始单元(52)的起始地面点(22)的位置,-求取所述参考平面(40)内的候选单元(60),其中,候选单元(60):是单元(50),为该单元尚未求取单元平面(54);与至少一个另外的单元(50)邻接,为该至少一个另外的单元已求取了单元平面(54),并且具有所述三维点云(20)的第二预定义最小数量的相对应的点,-根据在与各个候选单元(60)紧邻接的单元(50)中存在的所有单元平面(54),为每个候选单元(60)计算估计单元平面(62),-为每个候选单元(60)求取单元平面候选点(64),其中,所述三维点云(20)的点被求取为单元平面候选点(64),如果该点与当前所考察的候选单元(60)相对应,并且该点到所述候选单元(60)的估计单元平面(62)和/或到所述参考平面(40)的最小距离不超过第二预定义距离(66),和-为每个候选单元(60)求取单元平面(54),其中,这样求取所述单元平面(54),使得该单元平面根据预定义计算规则接近对应的候选单元(60)的单元平面候选点(64)的位置。2.根据权利要求1所述的方法,其中,-对所述参考平面(40)进行划分的单元(50)无间隙地彼此邻接,和/或构造为多边形、尤其是三角形或四角形的单元(50),和/或-各个单元(50)的形状和/或延伸尺度与所述传感器(10)的最大分辨率,和/或现有边界条件相关地适配。3.根据前述权利要求中任一项所述的方法,其中,所述至少一个预定义地面点标准得到满足,如果:-所述三维点云(20)的对应点与所述参考平面(40)之间的最短距离不超过第三预定义距离,和/或-由所述三维点云(20)的对应待考察点和与该点紧邻的至少两个点之间的向量(70)的
可能组合产生的所有向量积(72)相对于所述参考平面(40)的法线具有最大允许第一角度偏差,和/或-根据针对每个所考察点的向量积(72)中所求取的平均向量相对于所述参考平面(20)的法线(45)具有最大允许第二角度偏差。4.根据前述权利要求中任一项所述的方法,其中,所述三维点云(20)的这样的点被分类为对象点(26):-所述点相对于所述传感器(10)处于所述第一预定义距离(30)内,-所述点到所述参考平面(40)或到所述估计单元平面(62)或到所述单元平面(54)的最小距离超过预定义的对象最小距离,并且-所述点与紧邻点的向量积(72)相对于对应使用的参考平面(40、54、62)的法线超过第三预定义角度偏差。5.根据前述权利要求中任一项所述的方法,其中,所述三维点云(20)的子集或所有点与已被分类为地面点(22,24)无关地被分类为对象点(26),如果:-所述点的最紧邻点已被分类为所述对象点(26)。-到该最紧邻点的最短距离不超过第四预定义距离,并且-这两个点之间相对于所述参考平面(40)的距离不超过第五预定义距离。6.根据前述权利要求中任一项所述的方法,其中,所述计算规则引起:所述单元平面(54)与相对应的起始地面点(22)和/或单元平面候选点(64)之间的平方偏差的总和的最小化。7.根据前述权利要求中任一项所述的方法,其中,仅在以下情况下才为对应的单元(50)求取单元平面(54)或在后续处理步骤中使用单元平面:-所述起始地面点(22)或单元平面候选点(64)在对应的单元(50)内的分布的值达到预定义最小分布值,其中,一个单元(50)的到所述单元(50)的中心点分别具有最大距离的点离该中心点越远,并且这些点在所述单元(50)内分布得越均匀,则所述分布的值越大,和/或-所述单元平面(54)相对于所述参考平面不超过最大允许倾斜角度。8.根据前述权利要求中任一项所述的方法,其中,在计算所述估计单元平面(62)时,首先对相邻的单元(50)的单元平面(54)进行单独加权,其中,-所述起始地面点(22)和/或单元平面候选点(64)在对应的相邻单元(50)中的分布的值越高,和/或-对应的相邻单元(50)中的单元平面(54)与相对应的起始地面点(22)和/或单元平面候选点(64)之间的平方偏差的总和越小,则所述单独加权越高。9.根据前述权利要求中任一项所述的方法,其中,所述三维点云(20)的在具有所求取的单元平面(54)的单元(50)内的尚未被分类为地面点(22、24)或对象点(26)的所有点被分类为地面点(22、24),如果这些点到所述单元(50)的单元平面(54)的最小距离不超过所述第二预定义距离(66)。10.根据前述权利要求中任一项所述的方法,其中,基于所求取的单元平面(54)和/或所求取的地面点(22,24)和/或所求取的对象点(26)在环境识别系统中执行环境识别。
11.根据前述权利要求中任一项所述的方法,其中,所述传感器(10)是激光雷达传感器,并且尤其是运输工具的激光雷达传感器。12.用于处理代表环境的三维点云的装置(90),所述装置具有分析评价单元(92),其中,所述分析评价单元(92)设置为用于执行根据前述权利要求中任一项所述的方法。
技术总结
本发明涉及一种处理代表环境的三维点云(20)的方法和装置,该点云由传感器(10)产生。基于三维点云(20)内的所求取的起始地面点(22)首先辨识起始单元(52),这些起始地面点相对于被划分为单元(50)的参考平面(40)符合至少一个预定义地面点标准。接下来,为参考平面(40)的各个起始单元(52)求取单元平面(54)。基于起始单元(52)的单元平面(54),随后为从起始单元(52)出发的候选单元(60)求取估计单元平面(62)和地面点(24),然后将其转化为最终单元平面(54)。通过这种从起始单元出发的单元增长,参考平面的单元(50)被迭代地遍历和处理,使得三维点云基于该方法被可靠地分类为地面点(24)和对象点。点(24)和对象点。点(24)和对象点。
技术研发人员:傅承煊 J
受保护的技术使用者:罗伯特
技术研发日:2022.05.18
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。