1.本发明涉及单相无刷直流电动机。
背景技术:
2.以往,已知基于由霍尔元件检测出的转子的旋转位置即周向位置,切换对卷绕于定子的线圈的通电,从而进行定子的励磁切换,由此驱动电动机(参照专利文献1)。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开平11-332193号公报
技术实现要素:
6.发明要解决的技术问题
7.在得到定子的励磁切换定时的目的中,考虑使用内置霍尔元件并能够输出励磁切换定时的ic即驱动器。通过使用该驱动器,能够实现电动机的小型化、低成本化。
8.另一方面,最近,以得到定子的励磁切换定时以外的目的,产生取得转子的旋转位置的需求。在该情况下也考虑使用驱动器的输出信号,但驱动器的输出信号输出对定子的励磁切换最优化的信号,因此有可能与实际的转子的旋转位置产生偏差。因此,存在不能得到转子的正确的旋转位置的问题。
9.本发明的目的在于,能够检测转子的正确的旋转位置。
10.用于解决技术问题的方案
11.本技术例示的第一发明是一种单相无刷直流电动机,具有:转子,其能够以中心轴为中心旋转;定子,其具备多个凸极部、在凸极部之间具有槽的定子铁芯、以及卷绕于上述凸极部的绕组,该定子与上述转子隔着气隙对置;以及基板,其固定于上述定子,安装有进行对上述绕组的通电控制的驱动器,上述驱动器内置有取得上述通电控制的定时的霍尔元件,在上述基板上与上述驱动器分开地安装有并检测上述转子的周向位置的霍尔ic。
12.根据本技术例示的第一发明,在单相无刷直流电动机中,能够检测转子的正确的旋转位置。
附图说明
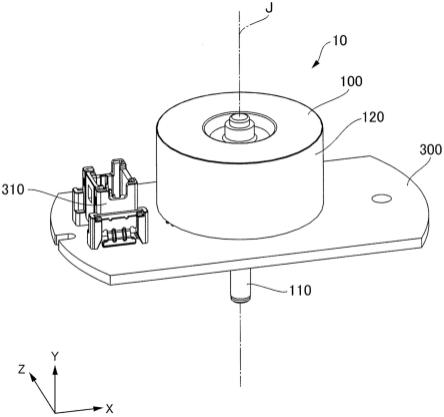
13.图1是示出本发明的第一实施方式的电动机的立体图。
14.图2是用于说明图1的电动机10的结构的侧剖视图。
15.图3是以与y轴正交且位于比定子200的凸极部220靠轴向另一侧且比驱动器330的轴向一侧端部更靠轴向一侧的面切断图1的电动机10而示出的俯视剖视图。
16.图4是从图1的电动机10拆下转子100而示出的俯视图。
具体实施方式
17.以下,参照附图对本发明的实施方式所涉及的电动机进行说明。另外,在以下的附图中,为了容易理解各结构,有时使各结构中的比例尺和数量等与实际结构不同。
18.另外,在附图中,作为三维正交坐标系适当地示出xyz坐标系。在xyz坐标系中,y轴方向是与图1所示的中心轴j的轴向平行的方向。x轴方向为相对于中心轴j的径向中的图3的左右方向。z轴方向是与x轴方向和y轴方向的双方正交的方向。在x轴方向、y轴方向以及z轴方向的任一方向上,都将图中所示的箭头所指的一侧设为 侧,将相反侧设为-侧。
19.另外,在以下的说明中,将y轴方向的正侧( y侧)称为“前侧”或“一侧”,将y轴方向的负侧(-y侧)称为“后侧”或“另一侧”。另外,后侧(另一侧)及前侧(一侧)仅是用于说明的名称,并不限定实际的位置关系及方向。另外,只要没有特别说明,将与中心轴j平行的方向(y轴方向)简称为“轴向”,将以中心轴j为中心的径向简称为“径向”,将以中心轴j为中心的周向、即中心轴j的绕轴方向简称为“周向”。将在径向上靠近中心轴j的一侧称为“径向内侧”,将远离中心轴j的一侧称为“径向外侧”。
20.另外,在本说明书中,所谓“在轴向上延伸”,除了严格地在轴向(z轴方向)上延伸的情况之外,还包括相对于轴向在小于45
°
的范围内在倾斜的方向上延伸的情况。另外,在本说明书中,“在径向上延伸”除了严格地在径向、即在与轴向(z轴方向)垂直的方向上延伸的情况之外,还包括相对于径向在小于45
°
的范围内在倾斜的方向上延伸的情况。另外,所谓“平行”,除了严格地平行的情况以外,还包括相互所成的角在小于45
°
的范围内倾斜的情况。
21.[第一实施方式]
[0022]
<整体结构>图1是示出本发明的第一实施方式的电动机的立体图。
[0023]
图2是用于说明图1的电动机10的结构的侧剖视图。
[0024]
在本实施方式中,电动机10是单相无刷直流电动机。电动机10具有转子100、定子200和基板300。
[0025]
转子100能够以中心轴j为中心旋转。转子100具有沿着中心轴j配置的轴110。转子100具有从轴110向径向外侧扩展后向轴向另一侧扩展的外周部120。外周部120为从轴向一侧覆盖定子200的有底圆筒形状。外周部120具有从轴110向径向外侧扩展的底部120b和从底部120b的径向外侧端部向轴向另一侧扩展的侧壁部120a。详细情况如后所述,转子100在侧壁部120a的内周侧具有转子磁铁130。轴110与外周部120为一体。轴110也可以是与外周部120分体的部件。轴110由轴承轴支撑,但省略了轴承的图示。
[0026]
定子200具有轴110贯通的筒状的支柱部250,支柱部250贯通基板300的贯通孔300a。定子200在支柱部250的径向外侧具有定子铁芯210。详细情况如后所述,在定子铁芯210卷绕有作为电动机线圈的绕组211。定子200固定于基板300。定子200的定子铁芯210相比基板300位于轴向一侧。定子200可以直接固定于基板300,也可以间接地固定于基板300。
[0027]
图3是以与y轴正交且位于比定子200的凸极部220(参照图4)靠轴向另一侧且比驱动器330的轴向一侧端部靠轴向一侧的面切断图1的电动机10而示出的俯视剖视图。
[0028]
转子磁铁130在侧壁部120a的轴向另一侧端部固定于侧壁部120a的内周面。转子磁铁130是遍及周向整周地以等间隔交替地磁化配置有n极和s极的圆环状部件。
[0029]
图4是从图1的电动机10取下转子100而示出的俯视图。
[0030]
定子铁芯210具有向径向外侧延伸的凸极部220。凸极部220在周向上配置有多个。在本实施方式中,突极部220配置有四个。定子铁芯210在相邻的凸极部220彼此之间具有槽240。定子200具有通过槽240并卷绕于凸极部220的绕组211。凸极部220的径向外侧端部在径向上隔着气隙与转子磁铁130的内周面对置。即,定子200在径向上与转子100隔着气隙对置。
[0031]
在基板300上安装有连接器310。连接器310安装于基板300的轴向一侧的面。连接器310也可以安装于基板300的轴向另一侧的面。连接器310进行安装在基板300上的各部件与外部的电连接。连接器310与来自外部的配线连接。
[0032]
在基板300上安装有驱动器330。驱动器330安装于基板300的轴向一侧的面。驱动器330内置有霍尔元件。驱动器330在轴向上安装在与转子磁铁130的轴向另一侧端部对置的位置。驱动器330内置的霍尔元件检测转子100的旋转位置,取得针对卷绕于凸极部220的绕组211的通电控制的定时。驱动器330基于内置的霍尔元件所取得的通电控制的定时,进行针对卷绕于凸极部220的绕组211的通电控制。驱动器330内置的霍尔元件检测转子磁铁130的n极与s极的边界,来检测转子100的旋转位置即转子100的周向位置。驱动器330配置在定子铁芯210的槽240的周向位置。因此,驱动器330不容易受由定子200产生的电磁噪声的影响,能够更准确地检测转子100的周向位置。
[0033]
在基板300上与驱动器330分开地安装霍尔ic320。即,霍尔ic320是与驱动器330所内置的霍尔元件不同的部件。霍尔ic320安装在基板300的轴向一侧的面上。霍尔ic320在轴向上安装在与转子磁铁130的轴向另一侧端部对置的位置。霍尔ic320检测转子磁铁130的n极与s极的边界来检测转子100的旋转位置,即转子100的周向位置。根据电动机10,通过使用霍尔ic320检测出的转子100的周向位置,能够输出转子100的正确的周向位置。以下,对霍尔ic320能够输出转子100的正确的周向位置进行详细说明。
[0034]
霍尔ic320与连接器310之间的距离比驱动器330与连接器310之间的距离短。因此,能够使连接霍尔ic320和连接器310的配线的长度比连接驱动器330和连接器310的配线的长度短,不容易受电磁噪声的影响,根据霍尔ic320能够更准确地检测转子的周向位置。
[0035]
霍尔ic320配置在定子铁芯210的槽240的周向位置。因此,霍尔ic320不容易受由定子200产生的电磁噪声的影响,能够更准确地检测转子100的周向位置。例如,霍尔ic320与转子磁铁130的轴向另一侧端部对置,并配置于最接近连接器310的槽240。
[0036]
另外,在转子100旋转时,驱动器330切换定子200的绕组211的通电的定时与转子磁铁130的n极与s极的边界来到霍尔ic320的周向位置的定时不同。通过这样配置驱动器330和霍尔ic320,能够使容易产生电磁噪声的定子200的绕组的通电切换定时与由霍尔ic320对转子100的周向位置进行检测并输出的定时错开。通过这样错开定时,在利用霍尔ic320进行检测时,不会产生通电切换时的电磁噪声,霍尔ic320的输出不容易受电磁噪声的影响,能够更准确地检测转子100的周向位置。
[0037]
另外,在转子100旋转时,驱动器330切换定子200的绕组211的通电的定时,也可以在转子磁铁130的n极与s极的边界来到霍尔ic320的周向位置的定时之后。这样,能够以电磁噪声较少的定时进行由霍尔ic320对转子100的周向位置的检测以及输出,因此能够更准确地检测转子100的周向位置。
[0038]
另外,在转子100旋转时,驱动器330切换定子200的绕组211的通电的定时也可以
在转子磁铁130的n极与s极的边界来到霍尔ic320的周向位置的定时之前。这样,能够以电磁噪声较少的定时进行由霍尔ic320对转子100的周向位置的检测以及输出,因此能够更准确地检测转子100的周向位置,并且能够将由驱动器330内置的霍尔元件对转子100的周向位置的检测作为预报使用。例如通过在接受预报后对霍尔ic320通电,能够有助于省电化。
[0039]
另外,在本实施方式中,如图3及图4所示,驱动器330、定子铁芯210、霍尔ic320及连接器310配置在直线上。通过这样配置,能够缩短配线,不容易受电磁噪声的影响,能够更准确地检测转子100的周向位置。
[0040]
电动机的作用和效果
[0041]
接着,对电动机10的作用、效果进行说明。
[0042]
在上述实施方式的发明中,单相无刷直流电动机具有:转子,其能够以中心轴为中心旋转;定子,其具备多个凸极部和在凸极部之间具有槽的定子铁芯、以及卷绕于上述凸极部的绕组,该定子与上述转子隔着气隙对置;以及基板,其固定于上述定子,安装有进行对上述绕组的通电控制的驱动器,上述驱动器内置有取得上述通电控制的定时的霍尔元件,在上述基板与上述驱动器分开地安装有检测上述转子的周向位置的霍尔ic。
[0043]
因此,由于由霍尔ic检测转子的周向位置,所以不需要使用内置于驱动器中的霍尔元件的输出,因此不容易受电磁噪声的影响,能够更准确地检测转子的周向位置。
[0044]
另外,上述基板具备连接来自外部的配线的连接器,上述霍尔ic与上述连接器之间的距离比上述驱动器与上述连接器之间的距离短。
[0045]
因此,由于霍尔ic与连接器之间的距离短,因此不容易受电磁噪声的影响,能够更准确地检测转子的周向位置。
[0046]
另外,上述驱动器内置的上述霍尔元件及上述霍尔ic配置于上述定子铁芯的上述槽的周向位置。
[0047]
因此,不容易受到由定子产生的电磁噪声的影响,能够更准确地检测转子的周向位置。
[0048]
另外,所述转子具备在周向上交替配置n极和s极的转子磁铁,在所述转子旋转时,所述驱动器切换所述定子的绕组的通电的定时与所述转子磁铁的n极与s极的边界来到所述霍尔ic的周向位置的定时不同。
[0049]
因此,通过使容易产生电磁噪声的定子的绕组的通电切换定时与由霍尔ic对转子位置的输出定时错开,从而霍尔ic的输出不容易受电磁噪声的影响,能够更准确地检测转子的周向位置。
[0050]
另外,在所述转子旋转时,所述驱动器切换所述定子的绕组的通电的定时在所述转子磁铁的n极与s极的边界来到所述霍尔ic的周向位置的定时之后。
[0051]
因此,能够以电磁噪声少的定时进行由霍尔ic对转子位置的输出,能够更正确地检测转子的周向位置。
[0052]
另外,在所述转子旋转时,所述驱动器切换所述定子的绕组的通电的定时在所述转子磁铁的n极与s极的边界来达所述霍尔ic的周向位置的定时之前。
[0053]
因此,能够将由驱动器内置的霍尔元件对转子位置的检测作为预报使用,例如通过在接受预报之后对霍尔ic通电,能够有助于省电化。
[0054]
另外,将上述驱动器、上述定子铁芯、上述霍尔ic及上述连接器配置在直线上。
[0055]
因此,通过将驱动器、定子铁芯、霍尔ic以及连接器配置在直线上,能够缩短配线,不容易受电磁噪声的影响,能够更准确地检测转子的周向位置。
[0056]
上述实施方式的电动机的用途没有特别限定。另外,上述各结构能够在相互不矛盾的范围内适当地组合。
[0057]
以上,对本发明的优选实施方式进行了说明,但本发明并不限定于这些实施方式,能够在其主旨的范围内进行各种变形及变更。这些实施方式及其变形包含在发明的范围及主旨内,同时包含在权利要求书记载的发明及其均等的范围内。
[0058]
符号说明
[0059]
10—电动机,100—转子,200—定子,300—基板,310—连接器,320—霍尔ic,330—驱动器。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。