一种矿山ai机器视觉智能采集装置
技术领域
1.本实用新型涉及ai机器技术领域,具体为一种矿山ai机器视觉智能采集装置。
背景技术:
2.ai机器就是人工智能的机器,他是由人制造出来的机器,通过程序操作机器替代人类部分的工作,其可长时间进行不间断的工作。
3.ai机器在进行工作时,会因路面情况而产生歪斜倾倒,一旦倾倒其不会自己翻身重新归正,影响矿山ai机器的视觉采集,需要人为将其扶正才能继续进行视觉拍摄采集,不够便捷。
技术实现要素:
4.(一)解决的技术问题
5.本实用新型的目的在于提供一种矿山ai机器视觉智能采集装置,以解决上述背景技术中提出ai机器在进行工作时,会因路面情况而产生歪斜倾倒,一旦倾倒其不会自己翻身重新归正,影响矿山ai机器的视觉采集,需要人为将其扶正才能继续进行视觉拍摄采集,不够便捷的问题。
6.(二)技术方案
7.为实现上述目的,本实用新型提供如下技术方案:一种矿山ai机器视觉智能采集装置,包括视觉智能采集装置主体、防侧翻机构、拍摄机构和移动机构,所述防侧翻机构位于视觉智能采集装置主体的外端,所述拍摄机构位于视觉智能采集装置主体的顶端,所述移动机构位于视觉智能采集装置主体的底端,所述防侧翻机构包括固定块、连接轴、电动推杆、传动杆、连接块和滚轮,所述固定块固定安装于视觉智能采集装置主体的外端,所述固定块的数量为两个,所述固定块呈对称分布。
8.优选的,所述连接轴固定安装于固定块的底端,所述电动推杆安装于连接轴的外端,所述电动推杆与连接轴活动连接,所述传动杆固定安装于电动推杆的传动端,通过连接轴限定电动推杆的位置,电动推杆带动传动杆的位置。
9.优选的,所述连接块固定安装于传动杆的底端,所述滚轮固定安装于连接块的底端,通过电动推杆带动传动杆移动,传动杆带动连接块移动,连接块带动滚轮移动,滚轮进行滚动,并对视觉智能采集装置主体进行支撑,当视觉智能采集装置主体歪斜时,电动推杆通过连接轴始终自然垂直,此时滚轮与地面接触滚动并进行支撑,打开电动推杆,电动推杆带动传动杆往外扩展,此时由于滚轮与地面接触从而形成反推力,从而将视觉智能采集装置主体推回正位。
10.优选的,所述拍摄机构包括电机、传动轴、连接套和摄像头,所述电机固定安装于视觉智能采集装置主体的顶端,所述传动轴固定安装于电机的传动端,所述传动轴贯穿视觉智能采集装置主体的顶端,所述连接套固定安装于传动轴的顶端,所述摄像头固定安装于连接套的顶端,通过电机带动传动轴转动,传动轴带动连接套转动,连接套带动摄像头转
动。
11.优选的,所述移动机构包括螺纹套、螺杆、固定盘、连接杆、主杆、马达一、从动杆一、履带和滚辊,所述螺纹套固定安装于视觉智能采集装置主体的底端,所述螺杆安装于螺纹套的内部,所述螺杆与螺纹套螺纹连接,通过螺纹套与螺杆将视觉智能采集装置主体和固定盘进行连接。
12.优选的,所述固定盘固定安装于螺杆的底端,所述连接杆固定安装于固定盘的外端,所述连接杆呈对称分布,所述主杆固定安装于固定盘的外端,所述主杆呈对称分布,通过固定盘固定连接杆和主杆的位置。
13.优选的,所述马达一固定安装于连接杆的外端且位于主杆的外端,所述从动杆一固定安装于马达一的传动端,所述滚辊固定安装于从动杆一的外端,所述履带安装于滚辊的外端,所述履带与滚辊活动连接,通过马达一限定从动杆一的位置,从动杆一限定滚辊的位置,滚辊限定履带的位置,履带便于视觉智能采集装置主体的移动。
14.与现有技术相比,本实用新型的有益效果是:
15.1、该矿山ai机器视觉智能采集装置,安装了防侧翻机构,当视觉智能采集装置主体歪斜时,电动推杆通过连接轴始终自然垂直,此时滚轮与地面接触滚动并进行支撑,打开电动推杆,电动推杆带动传动杆往外扩展,此时由于滚轮与地面接触从而形成反推力,从而将视觉智能采集装置主体推回正位,视觉智能采集装置主体重新进行工作。
16.2、该矿山ai机器视觉智能采集装置,安装了拍摄机构,通过电机带动传动轴转动,传动轴带动连接套转动,连接套带动摄像头转动,从而改变摄像头的拍摄方向,便于多方向进行视觉采集。
17.3、该矿山ai机器视觉智能采集装置,安装了移动机构,通过连接杆和主杆固定马达一的位置,马达一限定从动杆一的位置,从动杆一限定滚辊的位置,滚辊限定履带的位置,履带便于视觉智能采集装置主体的移动。
附图说明
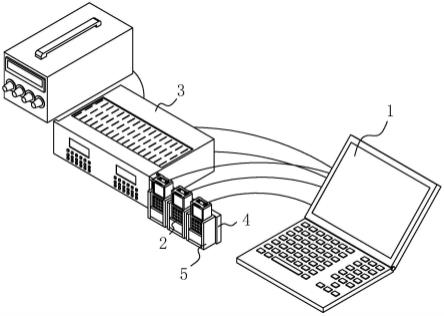
18.图1为本实用新型采集装置立体结构示意图;
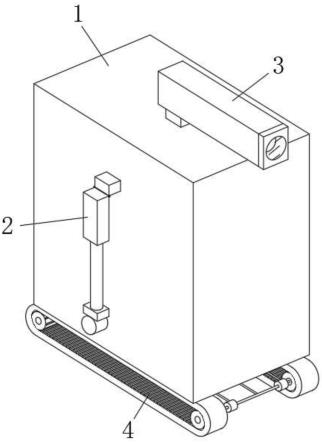
19.图2为本实用新型采集装置剖面结构示意图;
20.图3为本实用新型固定块剖面结构示意图;
21.图4为本实用新型防侧翻机构立体结构示意图。
22.图中:1、视觉智能采集装置主体;2、防侧翻机构;201、固定块;202、连接轴;203、电动推杆;204、传动杆;205、连接块;206、滚轮;3、拍摄机构;301、电机;302、传动轴;303、连接套;304、摄像头;4、移动机构;401、螺纹套;402、螺杆;403、固定盘;404、连接杆;405、主杆;406、马达一;407、从动杆一;409、履带;410、滚辊。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.请参阅图1-图4,本实用新型提供一种技术方案:一种矿山ai机器视觉智能采集装置,包括视觉智能采集装置主体1、防侧翻机构2、拍摄机构3和移动机构4,防侧翻机构2位于视觉智能采集装置主体1的外端,拍摄机构3位于视觉智能采集装置主体1的顶端,移动机构4位于视觉智能采集装置主体1的底端,防侧翻机构2包括固定块201、连接轴202、电动推杆203、传动杆204、连接块205和滚轮206,固定块201固定安装于视觉智能采集装置主体1的外端,固定块201的数量为两个,固定块201呈对称分布;
25.连接轴202固定安装于固定块201的底端,电动推杆203安装于连接轴202的外端,电动推杆203与连接轴202活动连接,传动杆204固定安装于电动推杆203的传动端,通过固定块201固定连接轴202的位置,连接轴202限定电动推杆203的位置,电动推杆203带动传动杆204的位置,连接块205固定安装于传动杆204的底端,滚轮206固定安装于连接块205的底端,通过电动推杆203带动传动杆204移动,传动杆204带动连接块205移动,连接块205带动滚轮206移动,滚轮206进行滚动,并对视觉智能采集装置主体1进行支撑,当视觉智能采集装置主体1歪斜时,电动推杆203通过连接轴202始终自然垂直,此时滚轮206与地面接触滚动并进行支撑,打开电动推杆203,电动推杆203带动传动杆204往外扩展,此时由于滚轮206与地面接触从而形成反推力,从而将视觉智能采集装置主体1推回正位,视觉智能采集装置主体1重新进行工作;
26.拍摄机构3包括电机301、传动轴302、连接套303和摄像头304,电机301固定安装于视觉智能采集装置主体1的顶端,传动轴302固定安装于电机301的传动端,传动轴302贯穿视觉智能采集装置主体1的顶端,连接套303固定安装于传动轴302的顶端,摄像头304固定安装于连接套303的顶端,通过电机301带动传动轴302转动,传动轴302带动连接套303转动,连接套303带动摄像头304转动,从而改变摄像头304的拍摄方向,便于多方向进行视觉采集,移动机构4包括螺纹套401、螺杆402、固定盘403、连接杆404、主杆405、马达一406、从动杆一407、履带409和滚辊410,螺纹套401固定安装于视觉智能采集装置主体1的底端,螺杆402安装于螺纹套401的内部,螺杆402与螺纹套401螺纹连接,通过螺纹套401与螺杆402将视觉智能采集装置主体1和固定盘403进行连接,便于后续的移动,固定盘403固定安装于螺杆402的底端,连接杆404固定安装于固定盘403的外端,连接杆404呈对称分布,主杆405固定安装于固定盘403的外端,主杆405呈对称分布,通过固定盘403固定连接杆404和主杆405的位置,使视觉智能采集装置主体1更加稳定,马达一406固定安装于连接杆404的外端且位于主杆405的外端,从动杆一407固定安装于马达一406的传动端,滚辊410固定安装于从动杆一407的外端,履带409安装于滚辊410的外端,履带409与滚辊410活动连接,通过连接杆404和主杆405固定马达一406的位置,马达一406限定从动杆一407的位置,从动杆一407限定滚辊410的位置,滚辊410限定履带409的位置,履带409便于视觉智能采集装置主体1的移动。
27.工作原理:通过螺纹套401与螺杆402将视觉智能采集装置主体1和固定盘403进行连接,固定盘403固定连接杆404和主杆405的位置,连接杆404和主杆405固定马达一406的位置,马达一406限定从动杆一407的位置,从动杆一407限定滚辊410的位置,滚辊410限定履带409的位置,当马达一406带动从动杆一407转动时,从动杆一407带动滚辊410转动,滚辊410带动履带409旋转转动,从而履带409带动视觉智能采集装置主体1进行位移,同时电机301带动传动轴302转动,传动轴302带动连接套303转动,连接套303带动摄像头304转动,
从而改变摄像头304的拍摄方向,使用者可进行多方向的视觉采集,当移动的过程中,视觉智能采集装置主体1受到颠簸歪斜时,电动推杆203通过连接轴202始终自然垂直,此时滚轮206与地面接触滚动并进行支撑,打开电动推杆203,电动推杆203带动传动杆204往外扩展,此时由于滚轮206与地面接触从而形成反推力,从而将视觉智能采集装置主体1推回正位,视觉智能采集装置主体1可正常进行工作。
28.最后应当说明的是,以上内容仅用以说明本实用新型的技术方案,而非对本实用新型保护范围的限制,本领域的普通技术人员对本实用新型的技术方案进行的简单修改或者等同替换,均不脱离本实用新型技术方案的实质和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。