1.本实用新型属于龙门模组技术领域,尤其涉及一种高精度单驱龙门模组。
背景技术:
2.龙门模组,是目前广泛使用的驱动设备,常用的龙门模组有单驱龙门模组,传统的单驱龙门模组一般采用伺服电机加丝杠的方式进行驱动操作,这种驱动模组的驱动长度受限,并且在驱动过程中存在机械间隙,容易导致传动误差,同时在摩擦接触后将会导致驱动精度低下,无法精确的进行驱动操作,整体结构稳定性较差。
技术实现要素:
3.本实用新型克服了现有技术的不足,提供一种高精度单驱龙门模组,以解决现有技术中存在的问题。
4.为达到上述目的,本实用新型采用的技术方案为:一种高精度单驱龙门模组,包括支撑平台、位于所述支撑平台一侧的第一支撑座、位于所述支撑平台另一侧的第二支撑座以及用于载物的横梁组件;所述第一支撑座与所述第二支撑座之间呈平行设置,所述第一支撑座上设置有主动组件,所述第二支撑座上设置有从动组件,所述横梁组件包括运动横梁、位于所述运动横梁内的横梁驱动电机以及能够沿所述运动横梁长度方向进行运动的载台,所述运动横梁靠近所述第一支撑座一端设置有加强块。
5.本实用新型一个较佳实施例中,所述主动组件包括主动驱动电机以及能够沿所述第一支撑座长度方向进行运动的连接座。
6.本实用新型一个较佳实施例中,所述主动驱动电机与所述横梁驱动电机均为直线电机。
7.本实用新型一个较佳实施例中,所述第一支撑座上设置有主动导轨,所述连接座通过主动滑块与所述主动导轨连接,所述运动横梁靠近所述第一支撑座一端通过夹紧块与所述主动滑块连接。
8.本实用新型一个较佳实施例中,所述从动组件包括从动导轨与能够沿所述从动导轨长度方向进行运动的从动滑块,所述运动横梁靠近所述第二支撑座一端通过所述从动滑块与所述从动导轨连接。
9.本实用新型一个较佳实施例中,所述支撑平台、第一支撑座以及第二支撑座均为大理石材料件。
10.本实用新型解决了背景技术中存在的缺陷,本实用新型具备以下有益效果:
11.本实用新型在支撑平台、横梁组件、主动组件以及从动组件的配合作用下,形成单驱龙门模组,降低了传动误差,提高了传动精度,同时,在运动横梁端部加设加强块,能够使运动横梁的重心偏向主动组件,减小从动组件位置处的受力,从而降低运动横梁靠近第二支撑座一端的偏摆,进一步提高精度。
附图说明
12.下面结合附图和实施例对本实用新型进一步说明;
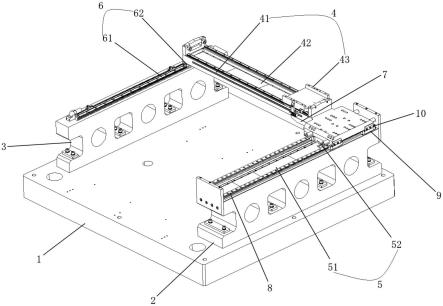
13.图1为本实用新型优选实施例的整体结构示意图;
14.图2为本实用新型优选实施例的主视图;
15.图中:1、支撑平台;2、第一支撑座;3、第二支撑座;4、横梁组件;41、运动横梁;42、横梁驱动电机;43、载台;5、主动组件;51、主动驱动电机;52、连接座;6、从动组件;61、从动导轨;62、从动滑块;7、加强块;8、主动导轨;9、主动滑块;10、夹紧块。
具体实施方式
16.现在结合附图和实施例对本实用新型作进一步详细的说明,这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
17.如图1与图2所示,一种高精度单驱龙门模组,包括支撑平台1、位于支撑平台1一侧的第一支撑座2、位于支撑平台1另一侧的第二支撑座3以及用于载物的横梁组件4;第一支撑座2与第二支撑座3之间呈平行设置,第一支撑座2上设置有主动组件5,第二支撑座3上设置有从动组件6,横梁组件4包括运动横梁41、位于运动横梁41内的横梁驱动电机42以及能够沿运动横梁41长度方向进行运动的载台43,运动横梁41靠近第一支撑座2一端设置有加强块7。
18.在本实施例中,横梁驱动电机42与主动驱动电机51均采用直线电机进行驱动,能够降低传动误差,大大提高传动精度,在实际使用中,将物体放置在横梁组件4的载台43上,由横梁驱动电机42与主动驱动电机51实现物体沿x轴方向与y轴方向运动。
19.进一步地,加强块7的存在,能够使运动横梁41的重心偏向主动组件5,从而减少从动组件6位置处的受力,降低了运动横梁41靠近第二支撑座3一端的偏摆,进而提高了运动精度。
20.具体地,主动组件5包括主动驱动电机51以及能够沿第一支撑座2长度方向进行运动的连接座52。
21.在本实施例中,主动驱动电机51与横梁驱动电机42均为直线电机,提高了传动精度。
22.进一步地,第一支撑座2上设置有主动导轨8,连接座52通过主动滑块9与主动导轨8连接,运动横梁41靠近第一支撑座2一端通过夹紧块10与主动滑块9连接,在主动导轨8与主动滑块9的配合作用下,实现了对连接座52运动方向的导向,而夹紧块10的存在,能够将运动横梁41靠近第一支撑座2一端与主动滑块9连接,保证运动横梁41能够与主动滑块9的同步运动。
23.在本实施例中,从动组件6包括从动导轨61与能够沿从动导轨61长度方向进行运动的从动滑块62,运动横梁41靠近第二支撑座3一端通过从动滑块62与从动导轨61连接,对运动横梁41的运动进行导向。
24.在本实施例中,支撑平台1、第一支撑座2以及第二支撑座3均为大理石材料件,保证了模组精度。
25.总而言之,本实用新型在支撑平台1、横梁组件4、主动组件5以及从动组件6的配合
作用下,形成单驱龙门模组,降低了传动误差,提高了传动精度,同时,在运动横梁41端部加设加强块7,能够使运动横梁41的重心偏向主动组件5,减小从动组件6位置处的受力,从而降低运动横梁41靠近第二支撑座3一端的偏摆,进一步提高精度。
26.以上依据本实用新型的理想实施例为启示,通过上述的说明内容,相关人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定技术性范围。
技术特征:
1.一种高精度单驱龙门模组,其特征在于,包括支撑平台、位于所述支撑平台一侧的第一支撑座、位于所述支撑平台另一侧的第二支撑座以及用于载物的横梁组件;所述第一支撑座与所述第二支撑座之间呈平行设置,所述第一支撑座上设置有主动组件,所述第二支撑座上设置有从动组件,所述横梁组件包括运动横梁、位于所述运动横梁内的横梁驱动电机以及能够沿所述运动横梁长度方向进行运动的载台,所述运动横梁靠近所述第一支撑座一端设置有加强块。2.根据权利要求1所述的一种高精度单驱龙门模组,其特征在于,所述主动组件包括主动驱动电机以及能够沿所述第一支撑座长度方向进行运动的连接座。3.根据权利要求2所述的一种高精度单驱龙门模组,其特征在于,所述主动驱动电机与所述横梁驱动电机均为直线电机。4.根据权利要求2所述的一种高精度单驱龙门模组,其特征在于,所述第一支撑座上设置有主动导轨,所述连接座通过主动滑块与所述主动导轨连接,所述运动横梁靠近所述第一支撑座一端通过夹紧块与所述主动滑块连接。5.根据权利要求1所述的一种高精度单驱龙门模组,其特征在于,所述从动组件包括从动导轨与能够沿所述从动导轨长度方向进行运动的从动滑块,所述运动横梁靠近所述第二支撑座一端通过所述从动滑块与所述从动导轨连接。6.根据权利要求1所述的一种高精度单驱龙门模组,其特征在于,所述支撑平台、第一支撑座以及第二支撑座均为大理石材料件。
技术总结
本实用新型公开了一种高精度单驱龙门模组,包括支撑平台、位于所述支撑平台一侧的第一支撑座、位于所述支撑平台另一侧的第二支撑座以及用于载物的横梁组件;所述第一支撑座与所述第二支撑座之间呈平行设置,所述第一支撑座上设置有主动组件,所述第二支撑座上设置有从动组件,所述横梁组件包括运动横梁、位于所述运动横梁内的横梁驱动电机以及能够沿所述运动横梁长度方向进行运动的载台,所述运动横梁靠近所述第一支撑座一端设置有加强块。本实用新型在运动横梁端部加设加强块,能够使运动横梁的重心偏向主动组件,减小从动组件位置处的受力,从而降低运动横梁靠近第二支撑座一端的偏摆,进一步提高精度。进一步提高精度。进一步提高精度。
技术研发人员:孙孟祥 蔡东 许锦铭
受保护的技术使用者:苏州泰科贝尔直驱电机有限公司
技术研发日:2020.12.29
技术公布日:2022/11/21
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。