1.本发明属于光电跟踪技术领域,具体地说涉及一种通用的运动平台跟踪引导计算方法。
背景技术:
2.在车、船、机等运动平台上的光电观测系统中,经常需要对观测对象实施跟踪引导、捕获、跟踪闭环、目标识别等作业,其中,跟踪引导是整个环节的起点,引导方法和精度对目标捕获效率至关重要。由于平台是运动的,其位置与姿态实时变化,因此,需要建立计算模型完成跟踪引导计算。由于光电观测系统的安装方式多种多样,如立式、卧式、吊舱式,导致计算模型各不相同,缺乏通用性。
技术实现要素:
3.针对现有技术的种种不足,为了解决上述问题,现提出一种通用的运动平台跟踪引导计算方法。
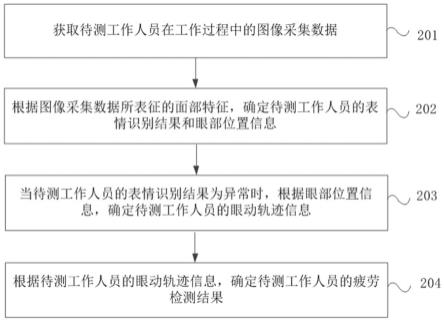
4.为实现上述目的,本发明提供如下技术方案:一种通用的运动平台跟踪引导计算方法,包括以下步骤:s100、实时获取目标的地固坐标、运动平台的大地坐标,或实时获取目标相对于运动平台处地平坐标系的方位俯仰坐标,解算所述目标在所述运动平台处的地平坐标;s200、实时获取所述运动平台的三轴姿态,标定观测系统坐标系相对运动平台坐标系的三轴安装姿态角,并基于所述目标在所述运动平台处的地平坐标解算所述目标在观测系统坐标系球坐标,得到跟踪引导数据。
5.本发明进一步设置为,步骤s100中,当目标为非自然天体时,解算所述目标在所述运动平台处的地平坐标,包括以下步骤:s101、实时获取运动平台的大地坐标,基于所述运动平台的大地坐标解算所述运动平台的地固坐标;s102、实时获取目标的地固坐标,并基于所述运动平台的地固坐标解算所述目标在所述运动平台处的站心地固坐标;s103、基于所述目标的站心地固坐标和所述运动平台的大地坐标,解算所述目标在所述运动平台处的地平坐标。
6.本发明进一步设置为,步骤s101中,实时获取的所述运动平台的大地坐标为,基于所述运动平台的大地坐标解算所述运动平台的地固坐标为,具体为:;
其中,,a表示地球赤道半径,且,f表示地球扁率,且,l表示经度,b表示纬度,h表示海拔。
7.本发明进一步设置为,步骤s102中,实时获取的所述目标的地固坐标为,基于所述运动平台的地固坐标解算所述目标在所述运动平台处的站心地固坐标,具体为:。
8.本发明进一步设置为,步骤s103中,基于所述目标的站心地固坐标和所述运动平台的大地坐标,解算所述目标在所述运动平台处的地平坐标,具体为:;其中,表示绕x轴或y轴或z轴旋转θ角的坐标变换矩阵,axis=x或y或z,表示坐标旋转所绕的轴;根据坐标旋转所绕的轴不同,的具体表达式分别为:,,。
9.本发明进一步设置为,步骤s100中,当目标为行星时,解算所述目标在所述运动平台处的地平坐标,具体为:实时获取目标相对于运动平台处地平坐标系的方位俯仰坐标(a,e),所述目标在运动平台处的地平坐标为,且,a表示方位角,e表示俯仰角。
10.本发明进一步设置为,步骤s200包括以下步骤:s201、实时获取所述运动平台的三轴姿态,基于所述目标在所述运动平台处的地平坐标解算所述目标在所述运动平台坐标内的直角坐标;s202、标定观测系统坐标系相对运动平台坐标系的三轴安装姿态角,基于所述目
标在所述运动平台坐标内的直角坐标解算所述目标在观测系统内的直角坐标;s203、基于所述目标在观测系统内的直角坐标解算所述目标在观测系统坐标系球坐标,得到跟踪引导数据。
11.本发明进一步设置为,步骤s201中,实时获取所述运动平台的三轴姿态为,基于所述目标在所述运动平台处的地平坐标解算所述目标在所述运动平台坐标内的直角坐标,具体为:;表示绕y轴旋转γ角的坐标变换矩阵,表示绕x轴旋转β角的坐标变换矩阵,表示绕z轴旋转负
ɑ
角的坐标变换矩阵,
ɑ
表示航向角,β表示俯仰角,γ表示滚转角。
12.本发明进一步设置为,步骤s202中,标定观测系统坐标系相对运动平台坐标系的三轴安装姿态角,基于所述目标在所述运动平台坐标内的直角坐标解算所述目标在观测系统内的直角坐标,具体为:,其中,表示三轴安装姿态角矩阵。
13.本发明进一步设置为,步骤s203中,基于所述目标在观测系统内的直角坐标解算所述目标在观测系统坐标系球坐标(
ɑ
,e,r),具体为:对于立式观测系统,;对于卧式观测系统,;对于吊舱式观测系统,;其中,
ɑ
表示方位角,e表示俯仰角,r表示斜距。
14.本发明进一步设置为,步骤s200中,观测系统坐标系相对运动平台坐标系的三轴安装姿态角的标定方法,具体为:
将观测系统固定安装在运动平台上,实时获取运动平台的大地坐标与三维姿态;选定空间不同方向上三个以上位置已知的点作为标定点,获取标定点的地固坐标;基于步骤s100得到所述目标在所述运动平台处的地平坐标,并解算标定点相对于观测系统的地平坐标系位置;调节观测系统的三轴安装姿态角以观测所述标定点,获得各标定点的观测位置,解算观测系统坐标系相对运动平台坐标系的三轴安装姿态角。
15.本发明进一步设置为,基于步骤s100得到所述目标在所述运动平台处的地平坐标为,并解算标定点相对于观测系统的地平坐标系位置,具体为:,a表示方位角,e表示俯仰角。
16.本发明进一步设置为,所述获得各标定点的观测位置,解算观测系统坐标系相对运动平台坐标系的三轴安装姿态角,具体为:;其中,θ表示运动平台的航向角,β表示运动平台的姿态仰角,γ表示运动平台的横滚角,
ɑ
表示方位角,e表示俯仰角。
17.本发明的有益效果是:1、采用坐标系变换的方法,建立了通用的运动平台跟踪引导计算方法,实现了对目标跟踪引导数据的实时解算,在运动平台光电观测领域具有良好的应用前景。
18.2、针对立式、卧式、吊舱式等不同安装方式的观测系统,给出与之相对应的差异性的计算方法。
19.3、针对不同类型的目标,给出与之相对应的差异性的计算方法。
20.4、观测系统坐标系相对运动平台坐标系的三轴安装姿态角为抽象概念,其在物理空间上不可见,无法通过工具测量得到,通过观测系统坐标系相对运动平台坐标系的三轴安装姿态角的标定方法可得到精确数据,提高目标跟踪引导数据的准确度。
附图说明
21.图1是一种通用的运动平台跟踪引导计算方法的流程图;图2是观测系统坐标系、运动平台坐标系以及地平坐标系的示意图;图3是不同安装方式的观测系统的示意图;其中,图3(a)为立式观测系统的示意图,图3(b)为卧式观测系统的示意图,图3(c)
为吊舱式观测系统的示意图。
具体实施方式
22.为了使本领域的人员更好地理解本发明的技术方案,下面结合本发明的附图,对本发明的技术方案进行清楚、完整的描述,基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的其它类同实施例,都应当属于本技术保护的范围。此外,以下实施例中提到的方向用词,例如“上”“下”“左”“右”等仅是参考附图的方向,因此,使用的方向用词是用来说明而非限制本发明创造。
23.实施例一:如图1所示,一种通用的运动平台跟踪引导计算方法,包括以下步骤:s100、实时获取目标的地固坐标、运动平台的大地坐标,或实时获取目标相对于运动平台处地平坐标系的方位俯仰坐标,解算所述目标在所述运动平台处的地平坐标。
24.其中,地固坐标涉及地固坐标系,地固坐标系为固定在地球上与地球一起旋转的坐标系。大地坐标涉及大地坐标系,大地坐标系是大地测量中以参考椭球面为基准面建立起来的坐标系,地面点的位置用经度、纬度和高度(海拔)表示。运动平台处地平坐标系以运动平台所在地为中心点,所在地的地平线作为基础平面。
25.优选的,当目标为非自然天体时,包括地面定点目标、空中旋翼无人机目标、浮空气球、飞机、导弹以及卫星等,解算所述目标在所述运动平台处的地平坐标,包括以下步骤:s101、实时获取运动平台的大地坐标,基于所述运动平台的大地坐标解算所述运动平台的地固坐标。
26.优选的,实时获取的所述运动平台的大地坐标为,基于所述运动平台的大地坐标解算所述运动平台的地固坐标为,具体为:;其中,,a表示地球赤道半径,且,f表示地球扁率,且,l表示经度,b表示纬度,h表示海拔。
27.s102、实时获取目标的地固坐标,并基于所述运动平台的地固坐标解算所述目标在所述运动平台处的站心地固坐标。
28.优选的,实时获取的所述目标的地固坐标为,基于所述运动平台的地固坐标解算所述目标在所述运动平台处的站心地固坐标,具体为:
。
29.s103、基于所述目标的站心地固坐标和所述运动平台的大地坐标,解算所述目标在所述运动平台处的地平坐标。
30.优选的,基于所述目标的站心地固坐标和所述运动平台的大地坐标,解算所述目标在所述运动平台处的地平坐标,具体为:;其中,表示绕x轴或y轴或z轴旋转θ角的坐标变换矩阵,axis=x或y或z,表示坐标旋转所绕的轴;根据坐标旋转所绕的轴不同,的具体表达式分别为:,,。
31.优选的,当目标为行星时,解算所述目标在所述运动平台处的地平坐标,具体为:实时获取目标相对于运动平台处地平坐标系的方位俯仰坐标(a,e),所述目标在运动平台处的地平坐标为,且,a表示方位角,e表示俯仰角。
32.所述行星主要指日月星辰等自然天体,对于这类目标,一般无法获得其地心地固坐标,而只能获得目标相对运动平台处地平坐标系的方位俯仰数据(a,e),暗含了“目标距离r=1”,在计算跟踪引导角度的过程中,r会被约掉,所以r设成多少都没有影响,这种处理技巧在远程目标的跟踪引导计算中经常用到。
33.s200、实时获取所述运动平台的三轴姿态,标定观测系统坐标系相对运动平台坐标系的三轴安装姿态角,并基于所述目标在所述运动平台处的地平坐标解算所述目标在观测系统坐标系球坐标,得到跟踪引导数据。
34.优选的,平台坐标系是指定义在运动平台上的坐标系,运动平台比如飞机、车辆、船只、卫星等。以飞机为例,坐标原点可以定义在飞机上任一位置、x轴指向右机翼方向、y轴指向机头方向、z轴指向机背天空方向。在运动平台跟踪引导计算过程中,需要引入运动平台的实时位置和姿态,而运动平台位置可以用gps等仪器测到或都由天文计算得到,姿态可以用角度传感器(陀螺、惯导等)测到,包括航向角α、俯仰角β、滚转角γ。鉴于运动平台坐标
系的位姿变化需要借助惯导等测量设备实时反映出来,因此,运动平台坐标系一般采用所安装的惯导坐标系来代表,其原点在惯导中心,三轴方向为惯导产品的三条棱边方向。
35.姿态角有明确的定义和取值范围:航向角可以定义为与正北方向的夹角,正北为0
°
,顺时针计,取值;俯仰角定义为头向与水平面的夹角,水平面内为0
°
,面上为正,面下为负,取值;滚转角定义为侧向与水平面的夹角,下压为正,上抬为负,取值。三个姿态角分别是绕运动平台坐标系z、x、y轴的旋转角。
36.观测系统坐标系是指定义在观测系统上的坐标系,一般用两个角度来表征,比如观测方位角、观测俯仰角。其定义取决于观测系统的旋转关节,通过约定角度零位和角度增减方向来刻划。零位包括设备零位和空间零位,设备零位是观测系统所带角度传感器上的零刻度线,空间零位是指特定场合中约定俗成的零位,比如正北方向一般定义为方位角零位、水平面定义为俯仰角零位。
37.对于地基静平观测平台,设备零位与空间零位的统一是经常要做的一项工作,称为方位、俯仰零位标定,一般通过观测北极星来确定。对于车、船、机等运动平台上的观测系统,一般不作零位统一工作,而是设法标定观测系统坐标系相对运动平台坐标系的位姿关系,如图2所示。在不考虑这两个坐标系原点相对偏移量的情况下,两者的相对关系可以用三个姿态角来表征,分别是观测系统坐标系相对运动平台坐标系的航向角u、俯仰角v、滚转角w,设法标定这三个角或者标定它们联合作用的姿态旋转矩阵。因为这三个角是以三个姿态旋转矩阵的形式起作用的,一般把它们合起来作为一个综合姿态矩阵使用,即:。
38.具体的,步骤s200包括以下步骤:s201、实时获取所述运动平台的三轴姿态,基于所述目标在所述运动平台处的地平坐标解算所述目标在所述运动平台坐标内的直角坐标。
39.优选的,实时获取所述运动平台的三轴姿态为,基于所述目标在所述运动平台处的地平坐标解算所述目标在所述运动平台坐标内的直角坐标,具体为:;表示绕y轴旋转γ角的坐标变换矩阵,表示绕x轴旋转β角的坐标变换矩阵,表示绕z轴旋转负
ɑ
角的坐标变换矩阵,
ɑ
表示航向角,β表示俯仰角,γ表示滚转角。
40.s202、标定观测系统坐标系相对运动平台坐标系的三轴安装姿态角,基于所述目标在所述运动平台坐标内的直角坐标解算所述目标在观测系统内的直角坐标。
41.优选的,标定观测系统坐标系相对运动平台坐标系的三轴安装姿态角,基于所述目标在所述运动平台坐标内的直角坐标解算所述目标在观测系统内的直角坐标,具体为:,其中,表示三轴安装姿态角矩阵。
42.s203、基于所述目标在观测系统内的直角坐标解算所述目标在观测系统坐标系球坐标,得到跟踪引导数据。
43.优选的,如图3所示,基于所述目标在观测系统内的直角坐标解算所述目标在观测系统坐标系球坐标(
ɑ
,e,r),具体为:对于立式观测系统,;对于卧式观测系统,;对于吊舱式观测系统,;其中,
ɑ
表示方位角,e表示俯仰角,r表示斜距。
44.其中,立式观测系统、卧式观测系统以及吊舱式观测系统均为成熟的现有技术,并不属于本发明的发明点,因此,采用现有的照片对安装方式进行解释说明。
45.卧式观测系统和吊舱式观测系统所用的上述计算公式不是约定俗成的,取决于实际系统的坐标定义,包括
ɑ
、e角的零位及增减方向。立式观测系统中方位角、俯仰角定义基本是约定俗成的:正北为方位零线,顺时针计;水平面为俯仰零位面,上正下负。
46.步骤s200中,观测系统坐标系相对运动平台坐标系的三轴安装姿态角的标定方法,具体为:将观测系统固定安装在运动平台上,实时获取运动平台的大地坐标与三维姿态。
47.选定空间不同方向上三个以上位置已知的点作为标定点,获取标定点的地固坐标。
48.基于步骤s100得到所述目标在所述运动平台处的地平坐标,并解算标定点相对于
观测系统的地平坐标系位置。
49.具体的,基于步骤s100得到所述目标在所述运动平台处的地平坐标为,并解算标定点相对于观测系统的地平坐标系位置,具体为:。
50.调节观测系统的三轴安装姿态角以观测所述标定点,获得各标定点的观测位置,解算观测系统坐标系相对运动平台坐标系的三轴安装姿态角。
51.优选的,所述获得各标定点的观测位置,解算观测系统坐标系相对运动平台坐标系的三轴安装姿态角,具体为:;其中,θ表示运动平台的航向角,β表示运动平台的姿态仰角,γ表示运动平台的横滚角。
52.当目标为恒星时,其数量几乎是无穷的,有几百万颗甚至更多。大多数情况下,观测系统并不预知会看到哪颗恒星,导致跟踪引导数据的准备上就没有针对性,但对所有恒星都进行实时计算是不现实的、也不必要,对于恒星的跟踪引导计算本发明不做详述。
53.以上已将本发明做一详细说明,以上所述,仅为本发明之较佳实施例而已,当不能限定本发明实施范围,即凡依本技术范围所作均等变化与修饰,皆应仍属本发明涵盖范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。