技术特征:
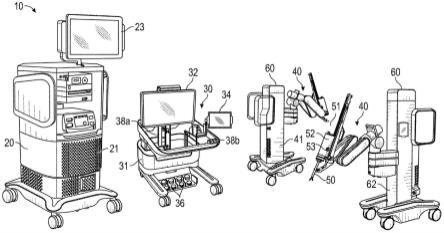
1.一种外科机器人系统,所述外科机器人系统包括:控制塔,所述控制塔包括具有第一错误处理程序的第一控制器,所述第一控制器被配置成检测与所述控制塔相关联的第一错误,并且所述第一错误处理程序被配置成基于所述第一错误生成第一错误信号;外科控制台,所述外科控制台联接到所述控制塔,所述外科控制台包括被配置成生成用户输入的用户输入设备;移动推车,所述移动推车联接到所述控制塔,所述移动推车包括第二控制器和第二错误处理程序,所述第二控制器被配置成检测与所述移动推车相关联的第二错误,并且所述第二错误处理程序被配置成基于所述第二错误生成第二错误信号;和外科机器人臂,所述外科机器人臂设置在所述移动推车上,所述外科机器人臂包括:外科器械,所述外科器械被配置成治疗组织并且能够响应于所述用户输入而致动;和第三控制器,所述第三控制器具有第三错误处理程序,所述第三控制器被配置成检测与所述外科机器人臂相关联的第三错误,并且所述第三错误处理程序被配置成基于所述第三错误生成第三错误信号。2.根据权利要求1所述的外科机器人系统,其中所述外科机器人臂能够响应于所述用户输入而在位置控制模式下操作并且响应于手动移动而在手动模式下操作。3.根据权利要求2所述的外科机器人系统,所述外科机器人系统还包括:错误处理程序网络,所述错误处理程序网络将所述第一错误处理程序、所述第二错误处理程序和所述第三错误处理程序互连,所述错误处理程序网络被配置成在所述第一错误处理程序、所述第二错误处理程序和所述第三错误处理程序之间传输所述第一错误信号、所述第二错误信号和所述第三错误信号。4.根据权利要求3所述的外科机器人系统,其中所述错误处理程序网络被配置成对所述第一错误信号、所述第二错误信号和所述第三错误信号中的一者进行分类并且基于分类执行响应。5.根据权利要求4所述的外科机器人系统,所述响应包括暂时中断所述手动模式并且禁用所述位置控制模式。6.根据权利要求5所述的外科机器人系统,其中所述控制塔、所述外科控制台或所述移动推车中的至少一者包括显示器。7.根据权利要求6所述的外科机器人系统,所述外科机器人系统还包括警报和通知子系统,所述警报和通知子系统联接到所述错误处理程序网络,所述警报和通知子系统被配置成在所述显示器上显示通知。8.根据权利要求7所述的外科机器人系统,其中所述错误处理程序网络被配置成在所述通知被用户解除后重新启用所述手动模式和所述位置控制模式中的至少一者。9.根据权利要求5所述的外科机器人系统,其中所述错误处理程序网络被配置成存储响应于所述手动模式的暂时中断和所述位置控制模式的禁用中的至少一者而递增的计数器。10.根据权利要求9所述的外科机器人系统,其中所述第一错误处理程序、所述第二错误处理程序和所述第三错误处理程序中的每一者存储单独计数器,所述单独计数器响应于使所述单独计数器中的任一单独计数器递增而递增。
11.一种外科机器人系统,所述外科机器人系统包括:控制塔,所述控制塔包括具有第一错误处理程序的第一控制器,所述第一控制器被配置成检测与所述控制塔相关联的第一错误,并且所述第一错误处理程序被配置成基于所述第一错误生成第一错误信号;外科控制台,所述外科控制台联接到所述控制塔,所述外科控制台包括被配置成生成用户输入的用户输入设备;多个移动推车,所述多个移动推车联接到所述控制塔,所述移动推车中的每个移动推车包括第二控制器和第二错误处理程序,所述第二控制器被配置成检测与所述移动推车相关联的第二错误,并且所述第二错误处理程序被配置成基于所述第二错误生成第二错误信号;和多个外科机器人臂,所述外科机器人臂中的每个外科机器人臂设置在所述多个移动推车中的一个移动推车上,所述外科机器人臂中的每个外科机器人臂包括:外科器械,所述外科器械被配置成治疗组织并且能够响应于所述用户输入而致动;和第三控制器,所述第三控制器具有第三错误处理程序,所述第三控制器被配置成检测与所述外科机器人臂相关联的第三错误,并且所述第三错误处理程序被配置成基于所述第三错误生成第三错误信号。12.根据权利要求11所述的外科机器人系统,其中所述外科机器人臂能够响应于所述用户输入而在位置控制模式下操作并且响应于手动移动而在手动模式下操作。13.根据权利要求12所述的外科机器人系统,所述外科机器人系统还包括:错误处理程序网络,所述错误处理程序网络将所述第一错误处理程序、所述第二错误处理程序和所述第三错误处理程序互连,所述错误处理程序网络被配置成在所述第一错误处理程序、所述第二错误处理程序和所述第三错误处理程序之间传输所述第一错误信号、所述第二错误信号和所述第三错误信号。14.根据权利要求13所述的外科机器人系统,其中所述错误处理程序网络被配置成对所述第一错误信号、所述第二错误信号和所述第三错误信号中的一者进行分类并且基于分类执行响应。15.根据权利要求14所述的外科机器人系统,所述响应包括暂时中断所述手动模式并且禁用所述位置控制模式。16.根据权利要求15所述的外科机器人系统,其中所述控制塔、所述外科控制台或所述移动推车之一中的至少一者包括显示器。17.根据权利要求16所述的外科机器人系统,所述外科机器人系统还包括警报和通知子系统,所述警报和通知子系统联接到所述错误处理程序网络,所述警报和通知子系统被配置成在所述显示器上显示通知。18.根据权利要求17所述的外科机器人系统,其中所述错误处理程序网络被配置成在所述通知被用户解除后重新启用所述手动模式和所述位置控制模式中的至少一者。19.根据权利要求15所述的外科机器人系统,其中所述错误处理程序网络被配置成存储响应于所述手动模式的暂时中断和所述位置控制模式的禁用中的至少一者而递增的计数器,并且所述第一错误处理程序、所述第二错误处理程序和所述第三错误处理程序中的每一者存储单独计数器,所述单独计数器响应于使所述单独计数器中的任一单独计数器递
增而递增。20.根据权利要求11所述的外科机器人系统,其中所述外科控制台包括:第四控制器,所述第四控制器具有第四错误处理程序,所述第四控制器被配置成检测与所述外科控制台相关联的第四错误,并且所述第四错误处理程序被配置成基于所述第四错误生成第四错误信号。
技术总结
本发明提供了一种外科机器人系统,该外科机器人系统包括:控制塔,该控制塔包括第一控制器,该第一控制器被配置成检测与控制塔相关联的第一错误并且具有第一错误处理程序,该第一错误处理程序被配置成基于第一错误生成第一错误信号。该系统包括:控制台,该控制台联接到控制塔并且包括显示器、被配置成生成用户输入的用户输入设备;和移动推车,该移动推车联接到控制塔并且具有第二控制器和第二错误处理程序,该第二控制器被配置成检测与移动推车相关联的第二错误,该第二错误处理程序被配置成基于第二错误生成第二错误信号。该系统包括机器人臂,该机器人臂设置在移动推车上并且包括:外科器械,该外科器械被配置成治疗组织并且能够响应于用户输入而致动;和第三控制器,该第三控制器被配置成检测与外科机器人臂相关联的第三错误并且具有第三错误处理程序,该第三错误处理程序被配置成基于第三错误生成第三错误信号。第三错误信号。第三错误信号。
技术研发人员:保罗
受保护的技术使用者:柯惠LP公司
技术研发日:2021.03.09
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。