一种基于cofdm的无人机多模态信号频率同步方法
技术领域
1.本发明涉及一种无人机信号频率同步方法,具体为一种基于cofdm的无人机多模态信号频率同步方法,属于无人机多模态信号通信技术领域。
背景技术:
2.当无人机飞行途中遇到障碍物(高山、树木)时,图传信号会变弱甚至无图传信号。目前,多旋翼无人机系统遥控器和地面控制端的上下行链路是通过2.4ghz或5.8ghz信道传输,由于2.4g或5.8ghz干扰比较多,并且绕射性能差,将此无线通信链路改造成多路信号链路可移动基站通过无人机挂载中继将信号进行桥接使距离传输更远质量更好,使飞机的作业范围更大。
3.为了进一步增加通讯距离,对无人机的数传、图传信号进行重新编码,增加1.3ghz的传输频段,能够有效扩大信号覆盖范围。同时,借助多路链路传输技术与应用频率自动切换技术,多台设备同时使用时自动根据无干扰频率切换技术。并且在频率产生的同时会同时产生很多次生频,这些频率往往是以主要频率倍数形式存在来加强通信量与距离。因此,在复杂地形进行巡视作业时,使用无人机信号中继基站能够克服无人机信号失联的难题,解决山区以及障碍物阻隔等复杂巡检环境下,作业难度大、作业效率低的问题。
技术实现要素:
4.本发明的目的就在于为了解决上述至少一个技术问题而提供一种基于cofdm的无人机多模态信号频率同步方法。
5.本发明通过以下技术方案来实现上述目的:一种基于cofdm的无人机多模态信号频率同步方法,包括以下步骤
6.步骤一、无人机控制器信号发射端通过信号调制和数模转换,得到模拟信号,无人机系统控制器信号发射端与控制站信号接收端采用多种频率信号传递信息;
7.步骤二、当无人机控制器信号发射端通信频率改变时,采用频率采集器获取发射端的信号频率并滤出低频谐波和高频谐波,然后传递到接收端;
8.步骤三、通过数传电台,将频率数据上传到信号接收端,接收端利用接收到的信号频率,使用内积公式进行解调,获得原始信号。
9.作为本发明再进一步的方案:所述步骤一中,发射端数模转换器输出信号数学模型为:
[0010][0011]
其中,v(t)为控制器发射端模拟信号,a为模拟信号幅值,ω为模拟信号角频率,为初始相位。
[0012]
作为本发明再进一步的方案:所述步骤一中,当无人机离控制器近时采用高频通信,增强数据传输容量。
[0013]
作为本发明再进一步的方案:所述步骤一中,当无人机离控制器远时,采用低频通信,有利于增强信号传播距离。
[0014]
作为本发明再进一步的方案:所述步骤二中,频率采集器的控制过程为:
[0015]
控制器发射端模拟信号v(t)经过改进型二阶广义积分器后,滤出低频谐波和高频谐波得到v
′
(t),而后经过锁相环得到控制器发射端模拟信号精确频率;
[0016]
其中,v(t)为控制器发射端模拟信号,v
′
(t)为经过改进型二阶广义积分器的发射端模拟信号,vq为发射端模拟信号在q轴的分量,pi为比例积分控制器,ω0为基准频率,ω为实时检出的发射端模拟信号频率。
[0017]
作为本发明再进一步的方案:所述改进型二阶广义积分器的幅值增益在控制器发射端信号频率处为0db。
[0018]
本发明的有益效果是:无人机系统控制器与控制站采用多种频率信号通信,采用基于精确幅值积分器获取信号发射端的频率信号,并通过数据链传递至信号接收端,当无人机离控制器较近时采用高频通信,增强数据传输容量;当无人机离控制器较远时,采用低频通信,有利于增强信号传播距离。不同频率通信切换时,信号发射端和信号接收端必须同时切换到相同信号频率,本方法利用频率采集器获取信号发射端的频率信号,使信号发射端和信号接收端保持频率同步,并滤出信号中的低频谐波和高频谐波。
附图说明
[0019]
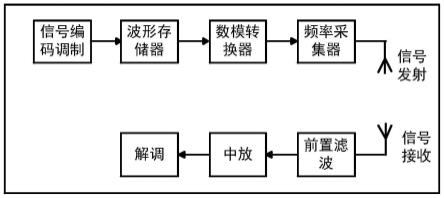
图1为本发明信号发射端和信号接收端工作示意图;
[0020]
图2为本发明频率采集器工作原理图;
[0021]
图3为本发明广义二阶积分器原理图;
[0022]
图4为本发明广义二阶积分器的传递函数。
具体实施方式
[0023]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0024]
实施例一
[0025]
如图1至图3所示,一种基于cofdm的无人机多模态信号频率同步方法,包括以下步骤
[0026]
步骤一、无人机控制器信号发射端通过信号调制和数模转换,得到模拟信号,无人机系统控制器信号发射端与控制站信号接收端采用多种频率信号传递信息;
[0027]
发射端数模转换器输出信号数学模型为:
[0028][0029]
其中,v(t)为控制器发射端模拟信号,a为模拟信号幅值,ω为模拟信号角频率,为初始相位。
[0030]
所述步骤一中,当无人机离控制器较近时采用高频通信,增强数据传输容量;当无
人机离控制器较远时,采用低频通信,有利于增强信号传播距离。
[0031]
步骤二、当无人机控制器信号发射端通信频率改变时,采用频率采集器获取发射端的信号频率并滤出低频谐波和高频谐波,然后传递到接收端;
[0032]
所述步骤二中,频率采集器的控制过程为:如图2所示,控制器发射端模拟信号v(t)经过改进型二阶广义积分器后,滤出低频谐波和高频谐波得到v
′
(t),而后经过锁相环得到控制器发射端模拟信号精确频率;
[0033]
其中,v(t)为控制器发射端模拟信号,v
′
(t)为经过改进型二阶广义积分器的发射端模拟信号,vq为发射端模拟信号在q轴的分量,pi为比例积分控制器,ω0为基准频率,ω为实时检出的发射端模拟信号频率;
[0034]
所述改进型二阶广义积分器的幅值增益在控制器发射端信号频率处为0db。
[0035]
步骤三、通过数传电台,将频率数据上传到信号接收端,接收端利用接收到的信号频率,使用内积公式进行解调,获得原始信号。
[0036]
实施例二
[0037]
如图1至图4所示,一种基于cofdm的无人机多模态信号频率同步方法,无人机图像信号经过信号调制、数模转换,以无线通信的方式传送到地面接收中心,为了保持信号发射端和信号接收端的调制、解调频率相同,使用频率采集器实时监测信号发射端的信号频率,并且过滤信号发射端发出的低频谐波和高频谐波,频率采集器收集到的频率值实时传递到信号接收端,保证信号接收端能够正确解调出原始信号。
[0038]
具体过程是:
[0039]
第一步:采用coms光学图像传感器,获得数字图像数据;
[0040]
第二步:根据mpeg2(运动图像专家组)音频压缩标准,将coms光学图像传感器编码、形成数据包,以ts传输流方式输出;
[0041]
第三步:采用cofdm(信道编码技术和正交分频复用技术)技术,对数字信号进行调制,具体过程为:
[0042]
(1)数据加扰:采用伪随机序列(prbs)进行异或运算,获得随机“0”、“1”信号,减少低频干扰;
[0043]
(2)外编码;
[0044]
(3)外交织(4)内编码(5)内交织(星座映射);
[0045]
第四步:将第三步采用cofdm调制后的图像信号,上变频到载波频率上,整个过程包括内插、抽取、滤波、上变频以及d/a转换;
[0046]
第五步,第四步得到的模拟信号经过频率采集器,获得模拟信号的频率,假设模拟信号为具体过程如下:
[0047]
模拟信号经过改进型广义二阶积分器,过滤掉杂波,如图4为广义二阶积分器的结构框图,合理选择参数k,广义二阶积分器在输入信号频率ω外具有较大的幅值衰减,形成带通,将输入的模拟信号提取出来,得到无杂波信号的v
′
(t)。
[0048]
如图3所示,v为控制器发射端模拟信号v(t)的频域分量,v
′
为经过改进型二阶广义积分的信号v
′
(t)的频率分量,k为调节参数,ω为输出信号的角频率,k
ac
为比例系数,其中,v为控制器发射端模拟信号v(t)的频域分量,v
′
为经过改进型二阶广义积分的信号v
′
(t)的频率分量,k为调节参数,1/s为积分器,k
ac
为比例系数,ω
′
为进入频率采集器的信号频率。
[0049]
第六步:如图2所示,v
′
(t)为时域信号,将v
′
(t)延时90度,得到αβ静止坐标系,经过park变换得到两相旋转坐标系下的分量,park分量为:
[0050][0051]c2s/2r
为两相静止和旋转坐标系的变换矩阵,v
′
(t)经过park变换后得到q轴分量v'q,设定初始频率ω0,设定当q轴分量v'q为零时,如图2所示,v(t)为控制器发射端模拟信号,v
′
(t)为经过改进型二阶广义积分器的发射端模拟信号,αβ/dq为两相静止和旋转坐标系的变换矩阵,v'q为发射端模拟信号在q轴的分量,pi为比例积分控制器,δω为pi比例积分控制器产生的频率偏差量,ω0为基准频率,ω为实时检测出的发射端模拟信号频率,1/s为积分器,θ为相位角。
[0052]
如图4所示,v(s)为控制器发射端模拟信号v(t)的状态分量,v
′
为经过改进型二阶广义积分的信号v
′
(t)的状态分量,k为调节参数,1/s为积分器,k
ac
为比例系数,ω
′
为进入频率采集器的信号频率。
[0053]
第七步:通过数传电台,将频率数据上传到中继站和信号接收端,用于数据解调。
[0054]
工作原理:当无人机离控制器较近时采用高频通信,当无人机离控制器较远时采用低频通信,有利于增强信号传播距离。不同频率通信切换时,信号发射端和信号接收端必须同时切换到相同信号频率,否则信号接收端就会解调错误。
[0055]
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
[0056]
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。