技术特征:
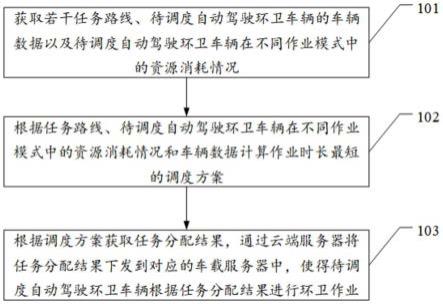
1.一种自动驾驶环卫车辆调度方法,其特征在于,包括:获取若干任务路线、待调度自动驾驶环卫车辆的车辆数据以及所述待调度自动驾驶环卫车辆在不同作业模式中的资源消耗情况;根据所述任务路线、所述待调度自动驾驶环卫车辆在不同作业模式中的资源消耗情况和所述车辆数据计算作业时长最短的调度方案;根据所述调度方案获取任务分配结果,通过云端服务器将所述任务分配结果下发到对应的车载服务器中,使得所述待调度自动驾驶环卫车辆根据所述任务分配结果进行环卫作业。2.根据权利要求1所述的自动驾驶环卫车辆调度方法,其特征在于,所述根据所述任务路线、所述待调度自动驾驶环卫车辆在不同作业模式中的资源消耗情况和所述车辆数据计算作业时长最短的调度方案,包括:根据所述待调度自动驾驶环卫车辆的数量对所有所述任务路线进行分组,得到若干个路线组,并给每个所述路线组分配一辆所述待调度自动驾驶环卫车辆,得到若干种分组结果,其中,所述任务路线的数量大于或等于所述待调度自动驾驶环卫车辆的数量,所述路线组的数量与所述待调度自动驾驶环卫车辆的数量相同;根据各所述分组结果的资源消耗情况、各所述分组结果对应的任务路线和对应的所述待调度自动驾驶环卫车辆的当前位置确定各所述分组结果的作业总路程;其中,各所述分组结果的资源消耗情况根据各所述分组结果中的任务路线对应的作业模式和各所述分组结果对应的所述待调度自动驾驶环卫车辆在不同作业模式中的资源消耗情况计算得到;根据各所述分组结果的作业总路程、各所述分组结果中的任务路线的作业模式以及对应的所述待调度自动驾驶环卫车辆在各作业模式下的作业速度计算各所述分组结果对应的作业时长;选取作业时长最短的分组结果作为调度方案。3.根据权利要求2所述的自动驾驶环卫车辆调度方法,其特征在于,所述根据所述待调度自动驾驶环卫车辆的数量对所有所述任务路线进行分组,包括:根据各所述任务路线的起点位置和终点位置对所述任务路线进行排序,得到路线总长度最短的路线序列;根据所述待调度自动驾驶环卫车辆的数量对所述路线序列进行分组,得到若干个路线组。4.根据权利要求3所述的自动驾驶环卫车辆调度方法,其特征在于,所述根据各所述任务路线的起点位置和终点位置对所述任务路线进行排序,得到路线总长度最短的路线序列,包括:根据各所述任务路线的起点位置和终点位置计算一个任务路线的终点到另一个任务路线的起点的距离,得到两个任务路线之间的目标距离;基于相邻任务路线之间的目标距离最短原则对所述任务路线进行排序,得到路线总长度最短的路线序列。5.根据权利要求2所述的自动驾驶环卫车辆调度方法,其特征在于,所述根据各所述分组结果的资源消耗情况、各所述分组结果对应的任务路线和对应的所述待调度自动驾驶环卫车辆的当前位置确定各所述分组结果的作业总路程,包括:
根据各所述分组结果中各所述路线组的任务路线的起点位置、终点位置以及对应的所述待调度自动驾驶环卫车辆的起点位置确定各所述路线组对应的基础路线;根据各所述分组结果中的任务路线对应的作业模式、各所述路线组对应的基础路线和各所述分组结果对应的待调度自动驾驶环卫车辆在不同作业模式中的资源消耗情况计算各所述分组结果的资源消耗情况;根据各所述分组结果的资源消耗情况和各所述分组结果对应的所述待调度自动驾驶环卫车辆的当前车载资源情况确定各所述分组结果是否需要增加资源补充路线;对于不需要增加资源补充路线的分组结果,根据该分组结果中各所述路线组对应的基础路线获取该分组结果的总路程;对于需要增加资源补充路线的分组结果,确定该分组结果中需要增加资源补充线路的目标路线组,在所述目标路线组对应的基础路线中增加资源补充路线,得到所述目标路线组的最终路线,并根据该分组结果中的所述目标路线组的最终路线和非目标路线组的基础路线获取该分组结果的总路程。6.根据权利要求5所述的自动驾驶环卫车辆调度方法,其特征在于,所述根据各所述分组结果中各所述路线组的任务路线的起点位置、终点位置以及对应的所述待调度自动驾驶环卫车辆的起点位置确定各所述路线组对应的基础路线,包括:以各所述分组结果中各所述路线组对应的所述待调度自动驾驶环卫车辆的起点位置为第一线路起点,以各所述分组结果中各所述路线组中的第一个任务路线的起点位置为第一线路终点,生成各所述路线组对应的初步路线;以各所述路线组对应的初步路线的终点位置为第二线路起点,以各所述路线组中的最后一个任务路线的终点位置为第二路线终点,生成各所述路线组对应的基础路线。7.根据权利要求5或6所述的自动驾驶环卫车辆调度方法,其特征在于,所述在所述目标路线组对应的基础路线中增加资源补充路线,得到所述目标路线组的最终路线,包括:在所述目标线路组对应的基础线路中确定一个目标点,以所述目标点以第三线路起点,以资源补充点为第三线路终点,生成局部的资源补充线路,以所述局部的资源补充线路的终点为第四线路起点,以所述目标点为第四线路终点,生成完整的资源补充线路;在所述目标路线组对应的基础路线中的所述目标点增加所述完整的资源补充路线,得到所述目标路线组的最终路线。8.根据权利要求2所述的自动驾驶环卫车辆调度方法,其特征在于,所述方法还包括:获取所述待调度自动驾驶环卫车辆根据所述任务分配结果执行环卫作业的实际作业数据和实际车载资源消耗数据,并根据所述实际作业数据和所述实际车载资源消耗数据优化所述分组结果的资源消耗情况的计算过程。9.一种自动驾驶环卫车辆调度装置,其特征在于,包括:获取单元,用于获取若干任务路线、待调度自动驾驶环卫车辆的车辆数据以及所述待调度自动驾驶环卫车辆在不同作业模式中的资源消耗情况;计算单元,用于根据所述任务路线、所述待调度自动驾驶环卫车辆在不同作业模式中的资源消耗情况和所述车辆数据计算作业时长最短的调度方案;分配单元,用于根据所述调度方案获取任务分配结果,通过云端服务器将所述任务分配结果下发到对应的车载服务器中,使得所述待调度自动驾驶环卫车辆根据所述任务分配
结果进行环卫作业。10.一种自动驾驶环卫车辆调度设备,其特征在于,所述设备包括处理器以及存储器;所述存储器用于存储程序代码,并将所述程序代码传输给所述处理器;所述处理器用于根据所述程序代码中的指令执行权利要求1-8任一项所述的自动驾驶环卫车辆调度方法。11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质用于存储程序代码,所述程序代码被处理器执行时实现权利要求1-8任一项所述的自动驾驶环卫车辆调度方法。
技术总结
本申请公开了一种自动驾驶环卫车辆调度方法、装置、设备和存储介质,方法包括:获取若干任务路线、待调度自动驾驶环卫车辆的车辆数据以及待调度自动驾驶环卫车辆在不同作业模式中的资源消耗情况;根据任务路线、待调度自动驾驶环卫车辆在不同作业模式中的资源消耗情况和车辆数据计算作业时长最短的调度方案;根据调度方案获取任务分配结果,通过云端服务器将任务分配结果下发到对应的车载服务器中,使得待调度自动驾驶环卫车辆根据任务分配结果进行环卫作业,改善了现有技术存在的环卫车辆调度效率低以及车辆清扫效率低的技术问题。辆调度效率低以及车辆清扫效率低的技术问题。辆调度效率低以及车辆清扫效率低的技术问题。
技术研发人员:刘辉 吴荣华 霍达
受保护的技术使用者:广州文远知行科技有限公司
技术研发日:2022.08.22
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。