技术特征:
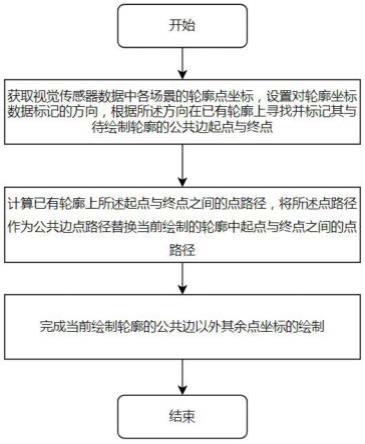
1.一种视觉传感器数据中多个轮廓共边计算方法,其特征在于,包括:获取视觉传感器数据中各场景的轮廓点坐标,设置对轮廓坐标数据标记的方向,根据所述方向在已有轮廓上寻找并标记其与待绘制轮廓的公共边起点与终点;计算已有轮廓上所述起点与终点之间的点路径,将所述点路径作为公共边点路径替换当前绘制的轮廓中起点与终点之间的点路径。2.根据权利要求1所述的一种视觉传感器数据中多个轮廓共边计算方法,其特征在于,所述轮廓坐标数据标记方向为顺时针方向或逆时针方向。3.根据权利要求1所述的一种视觉传感器数据中多个轮廓共边计算方法,其特征在于,在计算已有轮廓上所述起点与终点之间的点路径之前,还包括:判断所述起点与终点属于一个还是多个已有的轮廓;若所述起点与终点属于同一个已有的轮廓,则通过所述起点与终点计算已有轮廓与待绘制轮廓之间公共边的点路径;若所述起点与终点分别属于多个不同的已有轮廓,则先将对应的多个已有轮廓合并为一个虚拟的待共边轮廓,再通过所述起点与终点计算虚拟的待共边轮廓与待绘制轮廓之间公共边的点路径。4.根据权利要求3所述的一种视觉传感器数据中多个轮廓共边计算方法,其特征在于,所述虚拟的待共边轮廓仅参与计算所述公共边的点路径,在完成当前绘制的轮廓后,解除虚拟的待共边轮廓的合并。5.根据权利要求3所述的一种视觉传感器数据中多个轮廓共边计算方法,其特征在于,通过多边形合并算法将对应的多个已有的轮廓合并为一个虚拟的待共边轮廓。6.根据权利要求1~5任一项所述的一种视觉传感器数据中多个轮廓共边计算方法,其特征在于,计算已有轮廓上所述起点与终点之间的公共边点路径,包括:将待绘制轮廓的全部点坐标与已有轮廓的全部点坐标分别存入两个集合;在两个集合中查找全部公共点作为子集;对所述子集中的公共点按照所述方向进行排序,记录并标记起点与终点;对已有轮廓的点集合按照所述方向进行排序,查找已有轮廓的点集合中从所述起点到终点的全部点坐标,即得到公共边的点路径。7.一种视觉传感器数据中多个轮廓共边计算系统,其特征在于,包括:端点查找模块,设置对轮廓坐标数据标记的方向,根据所述方向在已有轮廓上寻找并标记其与待绘制轮廓的公共边起点与终点;图形绘制模块,计算已有轮廓上所述起点与终点之间的点路径,将所述点路径作为公共边点路径替换当前绘制的轮廓中起点与终点之间的点路径。8.一种电子设备,其特征在于,包括存储器、处理器,所述处理器用于执行存储器中存储的计算机管理类程序时实现如权利要求1-6任一项所述的一种视觉传感器数据中多个轮廓共边计算方法的步骤。9.一种计算机可读存储介质,其特征在于,其上存储有计算机管理类程序,所述计算机管理类程序被处理器执行时实现如权利要求1-6任一项所述的一种视觉传感器数据中多个轮廓共边计算方法的步骤。
技术总结
本发明提供一种视觉传感器数据中多个轮廓共边计算方法及系统,该方法包括:获取视觉传感器数据中各场景的轮廓点坐标,设置对轮廓坐标数据标记的方向,根据所述方向在已有轮廓上寻找并标记其与待绘制轮廓的公共边起点与终点;计算已有轮廓上所述起点与终点之间的点路径,将所述点路径作为公共边点路径替换当前绘制的轮廓中起点与终点之间的点路径。本发明的方法减少点线绘制操作,可大幅提升语义分割的绘制效率,且使得相邻轮廓的贴合更加精准,减少大量人工审核和重复修改的工作,提高生产力。力。力。
技术研发人员:周风明 周凡
受保护的技术使用者:武汉光庭信息技术股份有限公司
技术研发日:2022.07.05
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。