1.本发明涉及团雾检测和交通安全领域,具体涉及一种基于能见度识别的易发团雾路段动态限速系统及方法。
背景技术:
2.随着社会的发展,人们的日常出行、运输货物也越来越离不开高速公路,高速公路上发生的交通事故的概率大大增加。
3.交通事故的原因有人为因素和天气因素等,在天气因素中,团雾的突然出现是引起交通事故的重要原因之一。团雾又叫“坨坨雾”,是由于局部地区气候环境的影响而造成的,且在团雾内一片朦胧,在团雾外视线良好。团雾与其他雾相比,有突发性、流动性、范围小等特征,让很多司机猝不及防,来不及减速控制,从而造成了追尾事故等交通事故。
4.目前,国内对团雾天气下交通安全的研究多采用以传感器为主或者是以红外线测量大气中消光系数,这两种方法下受环境影响因素比较大,测量精度低,只能大概判断能见度范围,并不能根据团雾的能见度,及时改变限速,以及提醒驾驶者安全的跟车距离,防止事故的发生。
5.因此为减小事故率,提高驾驶者的警惕性,提出一种基于团雾路段能见度识别的动态限速指示系统及方法。
技术实现要素:
6.针对现有技术中存在的问题,本发明的目的在于提供一种基于能见度识别的易发团雾路段动态限速系统及方法。
7.为了达到上述目的,本发明采用以下技术方案予以实现。
8.一种基于能见度识别的易发团雾路段动态限速系统,包括多个图像采集组件、交通流传感器、工控机和信息提示组件;工控机分别与图像采集组件、交通流传感器、信息提示组件电连接;所述图像采集组件用于采集易发团雾路段的图像信息并传输给工控机;所述交通流传感器用于采集道路交通流量、车辆速度及车辆经过时刻并传输给工控机;所述工控机用于得到易发团雾路段的限速值,并控制信息提示组件进行限速提示;所述信息提示组件用于对驾驶员进行限速提示。
9.一种基于能见度识别的易发团雾路段动态限速方法,包括以下步骤:
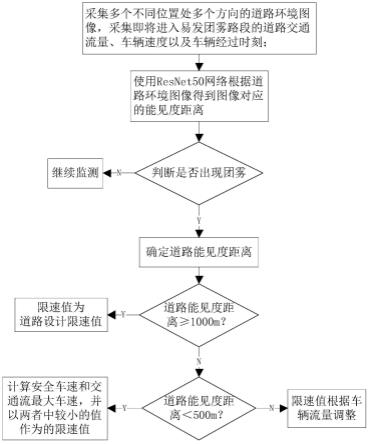
10.步骤1,在同一时间段内采集易发团雾路段中多个不同位置处多个方向的道路环境图像,使用深度学习神经网络根据道路环境图像得到图像对应的能见度距离;交通流传感器采集即将进入易发团雾路段的道路交通流量、车辆速度以及车辆经过时刻;
11.步骤2,当易发团雾路段中一个或多个位置处的一个或多个方向的道路环境图像的能见度距离小于1000m,且剩余其他方向的道路环境图像的能见度距离大于或等于1000m,则表明易发团雾路段出现团雾;将该一个或多个位置采集的道路环境图像中的最小的能见度距离作为道路能见度距离;
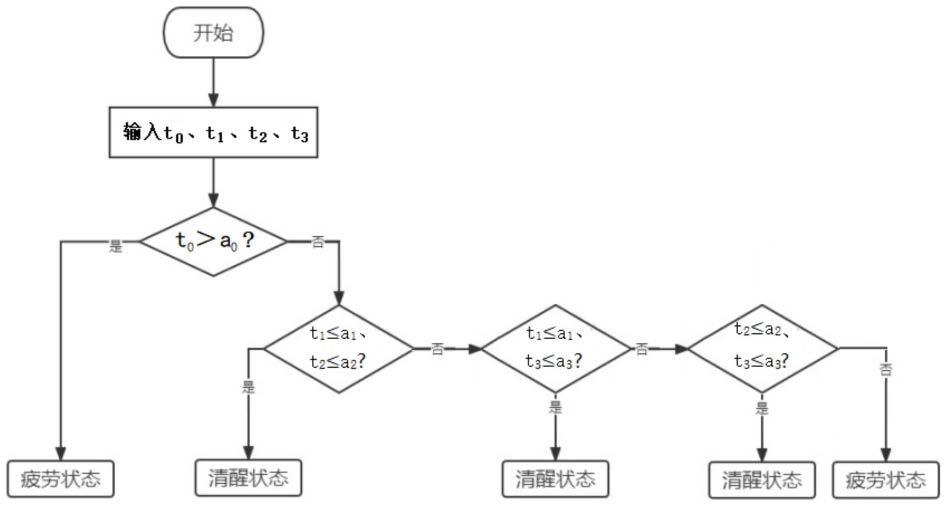
12.步骤3,当道路能见度距离大于或等于1000m时,易发团雾路段的限速值为道路设计限速值;当道路能见度距离小于1000m且大于或等于500m时,易发团雾路段的限速值根据道路交通流量调整;当道路能见度距离小于500m时,计算安全车速和交通流最大车速,并以两者中较小的值作为易发团雾路段的限速值。
13.与现有技术相比,本发明的有益效果为:用于易发团雾路段,通过深度神经网络识别道路环境图像的能见度距离,根据能见度距离得到路段限速值并对驾驶员进行提示,提醒驾驶员调节车速,从而降低追尾事故率,提高了道路交通安全。
附图说明
14.下面结合附图和具体实施例对本发明做进一步详细说明。
15.图1为本发明系统实施例的布置示意图;
16.图2为本发明系统实施例图像采集组件的结构示意图;
17.图3为本发明系统实施例设备箱的内部结构示意图;
18.图4为本发明系统实施例信息提示组件的结构示意图;
19.图5为本发明方法的流程图;
20.图6为本发明方法实施例识别能见度距离的实现流程图;
21.图7为本发明方法实施例resnet50网络的结构流程图。
22.附图标记说明:1图像采集组件,101立柱,102设备箱,103第一太阳能板,104第一蓄电池,105伺服电机,106摄像头;2信息提示组件,201立杆,202第二太阳能板,203led情报板,204第二蓄电池;3交通流传感器。
具体实施方式
23.下面将结合实施例对本发明的实施方案进行详细描述,但是本领域的技术人员将会理解,下列实施例仅用于说明本发明,而不应视为限制本发明的范围。
24.参考图1,一种基于能见度识别的易发团雾路段动态限速系统,包括多个图像采集组件1、交通流传感器3、工控机和信息提示组件2;
25.工控机分别与图像采集组件1、交通流传感器3、信息提示组件2电连接;
26.所述图像采集组件1用于采集易发团雾路段的图像信息并传输给工控机;
27.所述交通流传感器3用于采集道路交通流量、车辆速度及车辆经过时刻并传输给工控机;
28.所述工控机用于得到团雾路段的限速值,并控制信息提示组件2进行限速提示;
29.所述信息提示组件2用于对驾驶员进行限速提示。
30.进一步的,参考图2,所述图像采集组件1包含立柱101,所述立柱101上端设置有设备箱102,所述设备箱102的侧壁外表面设置有第一太阳能板103,参考图3,所述设备箱102内在底板上表面设置有第一蓄电池104和伺服电机105;所述伺服电机105的壳体与底板固定连接;所述设备箱102的顶板开设有与伺服电机105的输出轴直径匹配的第一通孔,所述伺服电机105的输出轴竖直向上穿过第一通孔,所述伺服电机105的输出轴伸出设备箱102的部分上设置有摄像头106;
31.还包含伺服电机控制电路,伺服电机控制电路用于控制伺服电机105输出轴的转
动角度及转动时间;
32.所述第一蓄电池104分别与第一太阳能板103、伺服电机105、伺服电机控制电路、摄像头106电连接,所述伺服电机控制电路与所述伺服电机105电连接。
33.进一步的,参考图4,所述信息提示组件2包含立杆201,所述立杆201上端设置有第二太阳能板202,所述立杆201靠近上端的部分上设置有led情报板203,所述led情报板203的背面设置有第二蓄电池204;所述第二蓄电池204分别与第二太阳能板202、led情报板203电连接。
34.进一步的,参考图1,所述图像采集组件1在易发团雾路段每隔1000m设置一处,所述信息提示组件2设置在易发团雾路段上游道路,所述交通流传感器3设置在所述信息提示组件2的上游道路。
35.参考图5,一种基于能见度识别的易发团雾路段动态限速方法,包括以下步骤:
36.步骤1,在同一时间段内采集易发团雾路段中多个不同位置处多个方向的道路环境图像,使用resnet50网络根据道路环境图像得到图像对应的能见度距离;交通流传感器采集即将进入易发团雾路段的道路交通流量、车辆速度以及车辆经过时刻;
37.参考图6、图7,使用resnet50网络对道路环境图像进行能见度距离识别前,首先将resnet50网络用在imagenet上进行预训练,然后将预训练后的resnet50网络向训练集上迁移,经过一系列的卷积、池化、全连接(使用vgg-16),采集样本集所具有的图像特征,使用softmax分类将处理后的样本集进行分类,softmax分类将模型的预测结果转化在指数函数上,把输出映射在(0-1)上,并且保证归一化为1,实现多分类。将能见度距离以50m分成一类,由该能见度距离对预训练模型进行相应调整,得到训练后的resnet50网络。使用测试集对训练后的resnet50网络进行测试,不符合则继续训练;符合要求则可用于识别道路环境图像对应的能见度距离。其中,训练集与测试集为带有能见度距离标签的道路环境图像的集合。
38.步骤2,当易发团雾路段中一个或多个位置处的一个或多个方向的道路环境图像的能见度距离小于1000m,且剩余其他方向的道路环境图像的能见度距离大于或等于1000m,则表明易发团雾路段出现团雾;将该一个或多个位置采集的道路环境图像中的最小的能见度距离作为道路能见度距离;
39.例如,当易发团雾路段中的1号位置与3号位置,均有2个方向的道路环境图像的能见度距离小于1000m,且剩余其他方向的道路环境图像的能见度距离大于或等于1000m,则表明易发团雾路段出现团雾;将1号位置与3号位置采集的道路环境图像中的最小的能见度距离作为道路能见度距离;
40.步骤3,当道路能见度距离大于或等于1000m时,易发团雾路段的限速值为道路设计限速值;led情报板上显示道路设计限速值;
41.当道路能见度距离小于1000m且大于或等于500m时,影响因素主要当前路段上的交通流流量,易发团雾路段的限速值根据道路交通流量调整,在led情报板上显示;
42.具体的,道路交通流量大于600辆时,易发团雾路段的限速值为75km/h;道路交通流量小于或等于600辆,且大于600辆时,易发团雾路段的限速值为85km/h;道路交通流量小于或等于510辆时,易发团雾路段的限速值为100km/h。
43.当道路能见度距离小于500m时,计算安全车速和交通流最大车速,并以两者中较
小的值作为易发团雾路段的限速值,在led情报板上显示;
44.其中,安全车速v0满足如下等式:
[0045][0046]
式中,s为行车安全距离;v0为安全车速;ρ为雾的浓度,按能见度范围划分浓度;τ为雾存在时间,以团雾出现开始计时;k1为雾浓度系数,取k1=-0.016;k2为雾存在时间系数取,取k2=-0.020;为平均路面摩擦系数,取其中,行车安全距离s等于道路能见度距离。
[0047]
行车安全距离s包括驾驶员反应距离s1、制动器响应距离s2、制动距离s3以及自车与前方车辆安全距离s4。
[0048]
驾驶员反应距离s1:由驾驶员反应时间t1决定,驾驶员在遇见突发能见度降低没有心理准备以及突发事故等,反应时间可能会加长。使用问卷形式,采集关于驾驶员驾驶车辆年数,驾驶者年龄,驾驶者视力,通过数据统计且考虑安全得到:t1=2.5,则s1=2.5v;v为车速;
[0049]
制动器响应距离s2:由于制动器结构,存在间隙,因此制动器响应时间t2一般为0.2s。由于制动器在驾驶者反应时间和制动器响应时间并没有工作,故公式为:s2=0.2v
[0050]
制动距离s3:包括做变减速运动和匀减速运动,制动器经过长时间使用,制动效果有所下降,在变减速运动时间为t
′3时制动距离s3计算公式如下:
[0051][0052]
式中,t
′3根据车型不同,制动器不同,达到最大减速度时间t
′3不同,一般取t
′3=1.2s。a
bmax
为最大制动减速度,是由地面制动力决定。而地面制动力又由制动器制动力与轮胎与地面间的附着力所决定,有:
[0053][0054][0055]
其中,f
xb
为地面制动力,g为汽车重量,为摩擦系数,g为重力加速度。
[0056]
如果遇到雾天,路面潮湿,附着系数有所降低。根据雾天时间长短不同,附着系数也有不同变化。根据统计,在雾天下对高速路段进行摩擦系数测定,拟合曲线,得到摩擦系数随雾的浓度ρ、雾存在时间τ变化而变化。
[0057]
因此,摩擦系数如下式:
[0058][0059]
其中:k1为雾浓度系数(雾浓度对摩擦系数影响),取k1=-0.016;k2为雾存在时间系数(雾存在时间对路面湿滑影响),取k2=-0.020;为平均路面摩擦系数,取
[0060]
前方车辆安全距离s4:考虑驾驶员遇见能见度低,心理紧张。根据经验,取s4=5m。
[0061]
综上,安全距离s如下式所示:
[0062][0063]
为保证安全性,令行车安全距离s等于道路能见度距离,反算出的车速v即为安全车速v0。
[0064]
交通流最大车速w计算公式如下:
[0065][0066]
式中,q为道路交通流量,n为5min内经过交通流传感器的车辆数量,ci为第i辆车的车速,ti为第i辆车与第i-1辆车经过交通流传感器的时间差。
[0067]
车辆进入易发团雾路段前会先经过交通流传感器,故交通流传感器可以采集道路交通流量、车辆经过的时刻,以及车辆经过时的车速。
[0068]
虽然,本说明书中已经用一般性说明及具体实施方案对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。