1.本实用新型涉及一种串焊机电池片柔性搬运机构。
背景技术:
2.现有串焊机电池片搬运机构的一套真空吸附手无法兼容不同尺寸的电池片,真空吸附手的相对间距无法根据电池片的尺寸及料盒的间距做调整,机械手臂搬运电池片的节拍慢、精度低,电池片搬运过程中易发生隐裂破碎。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种串焊机电池片柔性搬运机构,旨在解决现有技术中存在的兼容性低,电池片搬运节拍慢、精度低、以及易发生隐裂破碎的技术问题。
4.本实用新型的技术方案是:一种串焊机电池片柔性搬运机构,包括x轴模组组件、z轴模组组件、吸附搬运组件,z轴模组组件可滑动安装在x轴模组组件上,吸附搬运组件可升降安装在z轴模组组件上,所述吸附搬运组件包括安装在吸附手组件安装板上的真空吸附手、与所述真空吸附手连接的真空电磁阀组件,所述真空吸附手具有多个,分别可滑动安装在吸附手组件安装板上且通过连接机构与吸附手组件安装板固定连接,每个真空吸附手均包括吸掌和布置在吸掌底部的若干柔性吸盘。
5.进一步的,本实用新型中所述x轴模组组件包括安装在x轴模组安装板上的同步带模组、连接驱动所述同步带模组的减速机。
6.进一步的,本实用新型中所述z轴模组组件包括与所述同步带模组连接的丝杠模组、连接驱动所述丝杠模组的伺服电机。
7.进一步的,本实用新型中所述吸附手组件安装板与所述丝杠模组连接,吸附手组件安装板上设有导轨,导轨上可滑动安装有与各真空吸附手一一对应的多个滑块安装板,真空吸附手通过连接板与滑动安装板连接。
8.进一步的,本实用新型中所述吸附手组件安装板上设有滑槽,所述连接机构包括与滑动安装板连接并可滑动设置在所述滑槽内的锁紧螺栓,滑动安装板能够通过锁紧螺栓锁紧固定在吸附手组件安装板上从而固定真空吸附手。
9.进一步的,本实用新型中所述吸掌为h型吸掌,所述柔性吸盘均匀布置在h型吸掌的底部。
10.本实用新型与现有技术相比具有以下优点:
11.1)本实用新型双轴采用伺服电机搭配同步带及丝杠模组机构,能够实现电池片在x轴方向和z轴方向的定位移动,同步带和丝杠模组导程大、速度快、精度高,可满足高精度、快节拍的工况要求。
12.2)本实用新型中,真空吸附手通过滑块安装板可以在导轨上沿x轴方向移动调整位置,并通过锁紧螺栓快速安装固定,从而实现多个真空吸附手的相对间距在x轴方向可根
据电池片的尺寸及料盒的间距做手动调整,兼容性好。
13.3)本实用新型中,吸掌为h型结构,宽度长度可以兼容不同尺寸的电池片,柔性吸盘在吸掌的宽度及长度方向均匀合理分布,保证电池片在吸附过程中吸附点分布均匀,防止电池片在吸附过程中发生隐裂破碎。
附图说明
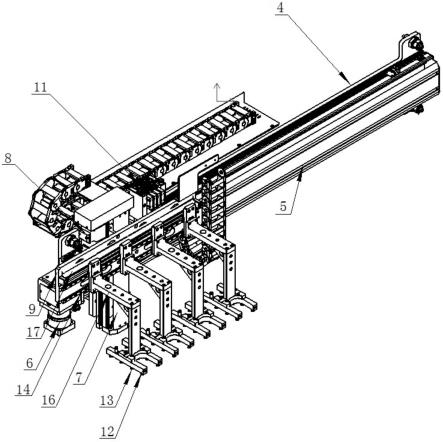
14.图1为本实用新型的结构简示图;
15.图2为本实用新型的具体结构示意图;
16.图3为本实用新型中所述吸附搬运组件的具体结构示意图;
17.图4为本实用新型中所述吸掌的具体结构示意图。
18.其中:1、x轴模组组件;2、z轴模组组件;3、吸附搬运组件;4、x轴模组安装板;5、同步带模组;6、减速机;7、丝杠模组;8、伺服电机;9、吸附手组件安装板;10、真空吸附手;11、真空电磁阀组件;12、吸掌;13、柔性吸盘;14、导轨;15、滑块安装板;16、连接板;17、滑槽。
具体实施方式
19.以下结合附图对本实用新型的具体实施方式做具体说明。
20.实施例:
21.结合附图所示为本实用新型一种串焊机电池片柔性搬运机构的具体实施方式,其主要包括x轴模组组件1、z轴模组组件2、吸附搬运组件3,z轴模组组件2可滑动安装在x轴模组组件1上,吸附搬运组件3可升降安装在z轴模组组件2上。具体的,本实施例中,x轴模组组件1包括安装在x轴模组安装板4上的同步带模组5、连接驱动同步带模组5的减速机6,z轴模组组件2包括与同步带模组5连接的丝杠模组7、连接驱动丝杠模组7的伺服电机8。
22.吸附搬运组件3包括安装在吸附手组件安装板9上的真空吸附手10、与真空吸附手10连接的真空电磁阀组件11,吸附手组件安装板9与丝杠模组7连接。
23.真空吸附手10具有多个,分别可滑动安装在吸附手组件安装板9上且通过连接机构与吸附手组件安装板9固定连接。吸附手组件安装板9上设有导轨14,导轨14上可滑动安装有与各真空吸附手10一一对应的多个滑块安装板15,真空吸附手10通过连接板16与滑动安装板15连接。吸附手组件安装板9上还设有滑槽17,连接机构包括与滑动安装板15连接并可滑动设置在滑槽17内的锁紧螺栓,滑动安装板15能够通过锁紧螺栓锁紧固定在吸附手组件安装板9上从而固定真空吸附手10。
24.每个真空吸附手10均包括吸掌12和布置在吸掌12底部的若干柔性吸盘13,本实施例中,如图4所示,吸掌12为h型吸掌,若干柔性吸盘13均匀布置在h型吸掌的底部。
25.本实施例具体工作时,首先将真空吸附手10的相对间距与料盒的相对间距调成一致,分别滑动真空吸附手10在吸附手组件安装板9上的位置并通过锁紧螺栓定位固定,真空吸附手10通过x轴模组组件1移动到料盒上料位,z轴模组组件2驱动吸附搬运组件3下降,真空吸附手10通过真空电磁阀组件11产生真空吸附电池片,z轴模组组件2带动上升,使电池片脱离料盒,x轴模组组件1将吸附搬运组件3移动到电池片传输位,z轴模组组件2下降将电池片放到电池片传输位上,真空电磁阀组件11破真空,使电池片与真空吸附手10上的柔性吸盘13脱离,从而实现电池片从一个工位到另一个工位的搬运。
26.当然上述实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡根据本实用新型主要技术方案的精神实质所做的修饰,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种串焊机电池片柔性搬运机构,其特征在于:包括x轴模组组件(1)、z轴模组组件(2)、吸附搬运组件(3),z轴模组组件(2)可滑动安装在x轴模组组件(1)上,吸附搬运组件(3)可升降安装在z轴模组组件(2)上,所述吸附搬运组件(3)包括安装在吸附手组件安装板(9)上的真空吸附手(10)、与所述真空吸附手(10)连接的真空电磁阀组件(11),所述真空吸附手(10)具有多个,分别可滑动安装在吸附手组件安装板(9)上且通过连接机构与吸附手组件安装板(9)固定连接,每个真空吸附手(10)均包括吸掌(12)和布置在吸掌(12)底部的若干柔性吸盘(13)。2.根据权利要求1所述的串焊机电池片柔性搬运机构,其特征在于:所述x轴模组组件(1)包括安装在x轴模组安装板(4)上的同步带模组(5)、连接驱动所述同步带模组(5)的减速机(6)。3.根据权利要求2所述的串焊机电池片柔性搬运机构,其特征在于:所述z轴模组组件(2)包括与所述同步带模组(5)连接的丝杠模组(7)、连接驱动所述丝杠模组(7)的伺服电机(8)。4.根据权利要求3所述的串焊机电池片柔性搬运机构,其特征在于:所述吸附手组件安装板(9)与所述丝杠模组(7)连接,吸附手组件安装板(9)上设有导轨(14),导轨(14)上可滑动安装有与各真空吸附手(10)一一对应的多个滑动安装板(15),真空吸附手(10)通过连接板(16)与滑动安装板(15)连接。5.根据权利要求4所述的串焊机电池片柔性搬运机构,其特征在于:所述吸附手组件安装板(9)上设有滑槽(17),所述连接机构包括与滑动安装板(15)连接并可滑动设置在所述滑槽(17)内的锁紧螺栓,滑动安装板(15)能够通过锁紧螺栓锁紧固定在吸附手组件安装板(9)上从而固定真空吸附手(10)。6.根据权利要求1所述的串焊机电池片柔性搬运机构,其特征在于:所述吸掌(12)为h型吸掌,所述柔性吸盘(13)均匀布置在h型吸掌的底部。
技术总结
本实用新型公开了一种串焊机电池片柔性搬运机构,包括X轴模组组件、Z轴模组组件、吸附搬运组件,Z轴模组组件可滑动安装在X轴模组组件上,吸附搬运组件可升降安装在Z轴模组组件上,吸附搬运组件包括安装在吸附手组件安装板上的真空吸附手、与真空吸附手连接的真空电磁阀组件,真空吸附手具有多个,分别可滑动安装在吸附手组件安装板上且通过连接机构与吸附手组件安装板固定连接,每个真空吸附手均包括吸掌和布置在吸掌底部的若干柔性吸盘。本实用新型能够满足高精度快节拍的工况要求,真空吸附手的相对间距在X轴方向可根据电池片的尺寸及料盒的间距做手动调整,兼容性好,还能保证电池片在吸附过程中吸附点分布均匀,防止电池片隐裂破碎。片隐裂破碎。片隐裂破碎。
技术研发人员:蔡之良 姚正辉
受保护的技术使用者:无锡市联鹏新能源装备有限公司
技术研发日:2022.02.25
技术公布日:2022/11/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。