1.本发明涉及建筑机械技术领域,具体为一种建筑环保墙纸涂胶机器人。
背景技术:
2.自动涂胶机器人系统是在机械、执行、信息处理、接口和软件等部分在电子技术的支配下,以系统的观点进行组合而形成的一种新型机械。自动涂胶机器人能保证涂胶均匀、无污染、无伤害、节省人力,提高工作效率。墙纸也称为壁纸,是一种用于裱糊墙面的室内装修材料,广泛用于住宅、办公室、宾馆、酒店的室内装修等,材质不局限于纸,也包含其他材料。在墙纸的张贴工艺中,完成墙壁的清理之后,墙纸张贴的施工工序往往要经历机器人涂胶、张贴、压实等几道工序。
3.目前的涂胶机器人在给多张壁纸涂胶后,壁纸随意堆叠落入放置架上,由于壁纸的施工过程较慢,堆叠后的壁纸与空气接触较多,使涂胶后的壁纸容易风干,并且灰尘容易粘在壁纸上,影响后续的施工质量。
技术实现要素:
4.本发明的目的在于提供一种建筑环保墙纸涂胶机器人,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种建筑环保墙纸涂胶机器人,包括左侧板、右侧板、涂胶辊和压辊,所述涂胶辊和压辊均转动连接在左侧板和右侧板之间,所述左侧板和右侧板之间固定连接有储胶箱,所述涂胶辊的下表面位于储胶箱内,所述左侧板和右侧板之间通过调节组件活动连接有安装箱,所述安装箱的下方设置有放置板,所述安装箱的内部设置有堆叠组件和按压组件,所述堆叠组件用于壁纸的堆叠,所述按压组件用于壁纸堆叠时的定位,所述堆叠组件的下方设置有辅助组件,所述辅助组件用于按压组件的复位。
6.优选的,所述左侧板的左侧安装有控制器,所述控制器用于控制调节组件和堆叠组件的移动,所述左侧板和右侧板的下表面均固定连接有支撑腿。
7.优选的,所述放置板的左右两侧分别与左侧板和右侧板固定连接,所述放置板与安装箱的下表面之间留有间隙。
8.优选的,所述调节组件包括第一电机、第一转轴和第一导向杆,所述安装箱的前后两侧分别固定连接有第一固定块和第二固定块,所述第一转轴的左右两侧外表面分别开设有左旋螺纹和右旋螺纹,所述第一电机固定连接在右侧板的右侧,所述第一转轴的一端与第一电机的输出端固定连接,所述第一转轴的另一端贯穿第二固定块并与左侧板转动连接,所述第一转轴与第二固定块螺纹连接,所述第一导向杆的一端与左侧板固定连接,所述第一导向杆的另一端贯穿第一固定块并与右侧板固定连接,所述第一导向杆与第一固定块滑动连接。
9.优选的,所述堆叠组件包括第二电机、第二转轴、安装杆、第一堆叠杆和第二堆叠
杆,所述第二电机滑动连接在安装箱的内部,所述第二转轴的一端与第二电机的输出端固定连接,所述第二转轴的另一端位于安装箱的外部并与安装杆固定连接,所述第一堆叠杆和第二堆叠杆分别固定连接在安装杆的两端。
10.优选的,所述第二电机的左侧固定连接有活动块,所述活动块的前后两端均插接有第二导向杆,所述第二导向杆的上下两端分别与安装箱的上下两侧内壁固定连接,所述第二导向杆与活动块滑动连接。
11.优选的,所述第二转轴的外表面固定连接有齿轮,所述安装箱远离第二电机的一侧开设有长孔,所述长孔的背面内壁固定连接有齿条,所述齿条与齿轮啮合连接。
12.优选的,所述按压组件包括两个圆杆和第一弹簧,所述第一弹簧套设在圆杆的外表面,两个所述圆杆的外表面套设有活动板,所述圆杆与活动板滑动连接,所述活动板的一侧两端均固定连接有压杆,所述压杆的一端位于安装箱的外部并固定连接有压柱。
13.优选的,所述辅助组件包括竖板、固定箱、滑动块、活动杆和第二弹簧,所述竖板的顶端与活动块固定连接,所述竖板的底端与固定箱固定连接,所述活动杆的一端位于固定箱的外部并开设有倾斜面,所述活动杆的另一端位于固定箱的外部并开设有倾斜槽,所述滑动块位于固定箱的内部并固定连接在活动杆的外表面,所述第二弹簧套设在活动杆的外表面,所述安装箱的内壁固定连接有与倾斜槽相对应的l形压板。
14.与现有技术相比,本发明的有益效果是:1、本发明通过第二电机能够带动辅助组件向上移动,此时辅助组件上的活动杆通过压板挤压倾斜槽,解除对活动板的限位,然后通过按压组件将壁纸压紧固定,从而避免堆叠壁纸时胶水的粘性使其出现移动,便于后续的堆叠工作;2、本发明调节组件能够使两个安装箱相互靠近,通过第二电机能够带动第一堆叠杆和第二堆叠杆旋转至横平状态,并位于前后的折痕处,从而将壁纸完全展开合并到一起,避免壁纸与空气接触较多,使涂胶后的壁纸不易风干,提高后续的施工质量。
附图说明
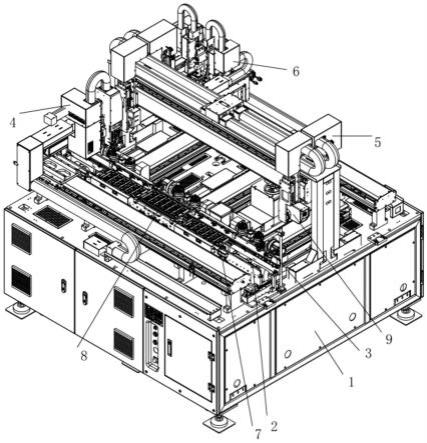
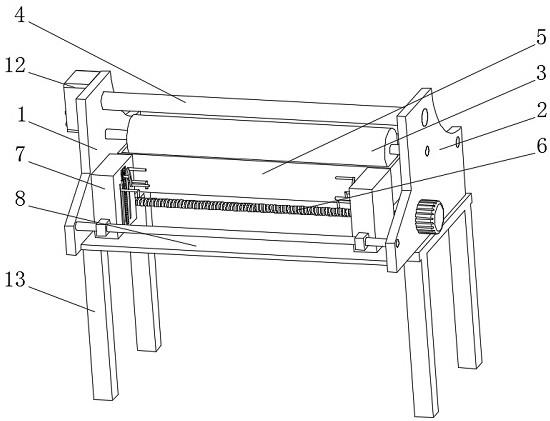
15.图1为本发明立体结构示意图;图2 为本发明调节组件的结构示意图;图3 为本发明安装箱的结构示意图;图4 为本发明安装箱的剖面结构示意图;图5为本发明图4中a处的放大结构示意图;图6为本发明按压组件的结构示意图;图7 为本发明活动块的结构示意图。
16.图中:1、左侧板;2、右侧板;3、涂胶辊;4、压辊;5、储胶箱;6、调节组件;7、安装箱;8、放置板;9、堆叠组件;10、按压组件;11、辅助组件;12、控制器;13、支撑腿;601、第一电机;602、第一转轴;603、第一导向杆;604、第一固定块;605、第二固定块;901、第二电机;902、第二转轴;903、安装杆;904、第一堆叠杆;905、第二堆叠杆;906、活动块;907、第二导向杆;908、齿轮;909、长孔;910、齿条;1001、圆杆;1002、第一弹簧;1003、活动板;1004、压杆;1005、压柱;1101、竖板;1102、固定箱;1103、滑动块;1104、活动杆;1105、第二弹簧;1106、倾斜面;1107、倾斜槽;1108、压板。
具体实施方式
17.实施例。
18.请参阅图1-7,图示中的一种建筑环保墙纸涂胶机器人,包括左侧板1、右侧板2、涂胶辊3和压辊4,涂胶辊3和压辊4均转动连接在左侧板1和右侧板2之间,左侧板1和右侧板2之间固定连接有储胶箱5,涂胶辊3的下表面位于储胶箱5内;左侧板1和右侧板2之间通过调节组件6活动连接有安装箱7,安装箱7的下方设置有放置板8,将胶水倒入储胶箱5内,壁纸从压辊4和涂胶辊3之间穿过落入放置板8上,由于涂胶辊3的下表面位于储胶箱5内,涂胶辊3在转动时能够将胶水均匀的涂抹在壁纸上,安装箱7的内部设置有堆叠组件9和按压组件10,堆叠组件9用于壁纸的堆叠,按压组件10用于壁纸堆叠时的定位,堆叠组件9的下方设置有辅助组件11,辅助组件11用于按压组件10的复位。
19.其中,左侧板1的左侧安装有控制器12,控制器12用于控制调节组件6和堆叠组件9的移动,左侧板1和右侧板2的下表面均固定连接有支撑腿13,通过设置支撑腿13使该装置具有一定的高度,便于后续的使用;同时,放置板8的左右两侧分别与左侧板1和右侧板2固定连接,放置板8与安装箱7的下表面之间留有间隙,通过放置板8与安装箱7的下表面之间留有间隙,避免安装箱7在移动的过程中与放置板8发生摩擦;其中,调节组件6包括第一电机601、第一转轴602和第一导向杆603,安装箱7的前后两侧分别固定连接有第一固定块604和第二固定块605,第一转轴602的左右两侧外表面分别开设有左旋螺纹和右旋螺纹,第一电机601固定连接在右侧板2的右侧,第一转轴602的一端与第一电机601的输出端固定连接,第一转轴602的另一端贯穿第二固定块605并与左侧板1转动连接,第一转轴602与第二固定块605螺纹连接,第一导向杆603的一端与左侧板1固定连接,第一导向杆603的另一端贯穿第一固定块604并与右侧板2固定连接,第一导向杆603与第一固定块604滑动连接,打开第一电机601带动第一转轴602旋转,由于第一转轴602外表面的左右两端分别开设有左旋螺纹和右旋螺纹,此时第一转轴602在旋转的过程中能够通过第二固定块605带动两个安装箱7相互靠近;同时,堆叠组件9包括第二电机901、第二转轴902、安装杆903、第一堆叠杆904和第二堆叠杆905,第二电机901滑动连接在安装箱7的内部,第二转轴902的一端与第二电机901的输出端固定连接,第二转轴902的另一端位于安装箱7的外部并与安装杆903固定连接,第一堆叠杆904和第二堆叠杆905分别固定连接在安装杆903的两端,打开第二电机901带动第二转轴902旋转,第二转轴902在旋转的过程中能够带动安装杆903旋转,安装杆903在旋转的过程中能够带动第一堆叠杆904和第二堆叠杆905旋转至横平状态,并位于前后的折痕处;另外,第二电机901的左侧固定连接有活动块906,活动块906的前后两端均插接有第二导向杆907,第二导向杆907的上下两端分别与安装箱7的上下两侧内壁固定连接,第二导向杆907与活动块906滑动连接,通过活动块906与第二导向杆907的配合使第二电机901移动的更加稳定;同时,第二转轴902的外表面固定连接有齿轮908,安装箱7远离第二电机901的一侧开设有长孔909,长孔909的背面内壁固定连接有齿条910,齿条910与齿轮908啮合连接,
第二转轴902在旋转的过程中能够带动齿轮908旋转,由于齿轮908与齿条910啮合,第二电机901能够带动活动块906在第二导向杆907上移动;其中,按压组件10包括两个圆杆1001和第一弹簧1002,第一弹簧1002套设在圆杆1001的外表面,两个圆杆1001的外表面套设有活动板1003,圆杆1001与活动板1003滑动连接,活动板1003的一侧两端均固定连接有压杆1004,压杆1004的一端位于安装箱7的外部并固定连接有压柱1005,通过第一弹簧1002的回复力带动活动板1003在圆杆1001上向下移动,活动板1003在移动的过程中带动压杆1004和压柱1005将壁纸压紧固定;其中,辅助组件11包括竖板1101、固定箱1102、滑动块1103、活动杆1104和第二弹簧1105,竖板1101的顶端与活动块906固定连接,竖板1101的底端与固定箱1102固定连接,活动杆1104的一端位于固定箱1102的外部并开设有倾斜面1106,活动杆1104的另一端位于固定箱1102的外部并开设有倾斜槽1107,滑动块1103位于固定箱1102的内部并固定连接在活动杆1104的外表面,第二弹簧1105套设在活动杆1104的外表面,活动块906在向下移动的过程中能够使活动板1003挤压活动杆1104上的倾斜面1106,此时活动杆1104带动滑动块1103在固定箱1102内滑动并压缩第二弹簧1105,直至使活动杆1104位于活动板1003的下方,安装箱7的内壁固定连接有与倾斜槽1107相对应的l形压板1108,活动杆1104在向上移动的过程中通过压板1108挤压倾斜槽1107,此时活动杆1104收缩进固定箱1102内,解除对活动板1003的限位。
20.涂胶机器人的原理:首先将胶水倒入储胶箱5内,壁纸从压辊4和涂胶辊3之间穿过落入放置板8上,由于涂胶辊3的下表面位于储胶箱5内,涂胶辊3在转动时能够将胶水均匀的涂抹在壁纸上,随后打开第一电机601带动第一转轴602旋转,由于第一转轴602外表面的左右两端分别开设有左旋螺纹和右旋螺纹,此时第一转轴602在旋转的过程中能够通过第二固定块605带动两个安装箱7相互靠近,同时第二电机901正转带动第二转轴902旋转,第二转轴902在旋转的过程中能够带动齿轮908旋转,由于齿轮908与齿条910啮合,第二电机901带动活动块906在第二导向杆907上向上移动,活动块906在移动的过程中能够通过竖板1101带动固定箱1102内的活动杆1104移动,活动杆1104在向上移动的过程中通过压板1108挤压倾斜槽1107,此时活动杆1104收缩进固定箱1102内,解除对活动板1003的限位,此时通过第一弹簧1002的回复力带动活动板1003在圆杆1001上向下移动,活动板1003在移动的过程中带动压杆1004和压柱1005将壁纸压紧固定,避免堆叠壁纸时胶水的粘性使其出现移动,此时壁纸位于第一堆叠杆904和第二堆叠杆905之间,然后第二电机901反转带动第二转轴902旋转,第二转轴902在旋转的过程中能够带动安装杆903和齿轮908旋转,安装杆903在旋转的过程中能够带动第一堆叠杆904和第二堆叠杆905旋转至横平状态,并位于前后的折痕处,从而将壁纸完全展开合并到一起,并且由于齿轮908与齿条910啮合,使第二电机901带动活动块906在第二导向杆907上向下移动,从而将壁纸向下移动放在放置板8上,活动块906在移动的过程中能够使活动板1003挤压活动杆1104上的倾斜面1106,此时活动杆1104带动滑动块1103在固定箱1102内滑动并压缩第二弹簧1105,直至使活动杆1104位于活动板1003的下方,然后第二电机901正转能够使活动杆1104带动活动板1003向上移动,活动板1003在移动的过程中使压柱1005松开壁纸,最后打开第一电机601带动两个安装箱7相互远离,进行下一次的堆叠即可。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。