1.本发明涉及一种用于控制平面驱动系统的方法以及平面驱动系统,该平面驱动系统设置用于实施控制该平面驱动系统的方法。
2.本专利申请要求欧洲专利申请ep 20 164 270.9的优先权,其公开内容通过引用结合于此。
背景技术:
3.平面驱动系统尤其可以应用在自动化技术、尤其是制造技术、操纵技术和工艺技术中。借助平面驱动系统,设备或机器的可运动的元件可以在至少两个线性独立的方向上运动或定位。平面驱动系统可以包括一个永久励磁的电磁的平面马达,该平面马达具有一个平面定子和一个转子,转子可以在定子上在至少两个方向上运动。
4.在永久励磁的电磁的平面马达中,由此将驱动力施加到转子上,使得载流的导体与磁体组件的驱动磁体磁性地相互作用。本发明尤其涉及平面驱动系统的这种设计方案,对于所述设计方案而言,电动的平面马达的驱动磁体布置在转子上,而平面马达的载流的导体布置在位置固定地布置的平面定子中。
5.在这种驱动系统中,转子包括至少一个用于在第一方向上驱动转子的第一磁体单元和用于在与第一方向线性独立的第二方向上、例如在与第一方向正交的第二方向上驱动转子的第二磁体单元。平面定子包括至少一组第一可通电导体以及一组第二可通电导体,所述第一可通电导体与第一磁体单元的磁体磁性地相互作用,以便沿第一方向驱动转子,所述第二可通电导体与第二磁体单元的磁体磁性地相互作用,以便沿第二方向驱动转子。第一和第二组导体通常能够彼此独立地通电,以便能够实现转子沿第一和第二方向彼此独立的运动。如果第一和第二组的导体本身至少部分地可彼此独立地通电,那么在一个定子上能够同时使得多个转子彼此独立地运动。
6.文献wo 2013/059934 a1、wo 2015/017933 a1、wo 2015/179962 a1、wo 2015/184553 a1、wo 2015/188281 a1、wo 2017/004716 a1分别描述了平面驱动系统(移位设备),所述平面驱动系统包括具有永久励磁的转子和包括多个可通电的导体的定子的电磁的平面马达。
7.为了控制平面驱动系统的转子,决定性的是,能够确定转子相对于平面驱动系统的一个定子模块或者多个定子模块的位置。为此,每个定子模块具有至少一个传感器模块,所述传感器模块具有多个磁场传感器,所述磁场传感器设置用于探测转子的磁场,由此能够实现转子相对于相应的传感器模块或相对于相应的定子模块的位置确定。可以越精确地执行对于转子的位置的这种确定,就越精确地控制平面驱动系统。
技术实现要素:
8.因此,本发明的任务在于,提供一种用于控制平面驱动系统的方法,该方法由于改进了对转子的位置确定而能够改进地且更精确地控制转子。本发明的另一任务在于,提供
一种平面驱动系统,该平面驱动系统设置用于实施根据本发明的方法。
9.所述任务通过根据独立权利要求所述的用于控制平面驱动系统的方法和平面驱动系统来解决。优选的实施方式在从属权利要求中给出。
10.根据本发明的一个方面,提供一种用于控制平面驱动系统的方法,其中,平面驱动系统包括至少一个控制单元、定子模块和转子,其中,定子模块包括多个可通电的定子导体,以用于产生用来电控制转子的定子磁场,其中,转子具有用于生成转子磁场的磁体组件,其中,通过定子磁场和转子磁场能实现在转子和定子模块之间的磁性耦合,其中,定子模块为了确定转子的位置而包括具有多个磁场传感器的传感器模块,其中,磁场传感器以二维布置方式布置在定子模块上,并且其中,每个磁场传感器设置用于,针对在二维布置方式中的空间区域来确定转子磁场,所述方法包括:
11.在第一定子磁场确定步骤中,针对多个不同的励磁电流以及针对磁场传感器的二维布置方式中的多个空间区域来确定定子磁场的多个值;
12.在定子磁场生成步骤中,通过将相应的励磁电流施加到相应的定子导体上来生成至少一个定子磁场,以用于电控制转子;
13.在总磁场确定步骤中,针对传感器模块的多个空间区域通过多个磁场传感器来确定总磁场的多个测量值,以用于测定转子的位置,其中,所述总磁场包括所述多个定子磁场和转子磁场的叠加;
14.在补偿步骤中,补偿定子磁场对由磁场传感器确定的总磁场的测量值的贡献并且生成由相应的磁场传感器针对相应的空间区域所确定的转子磁场的测量值,其中所述补偿包括从由磁场传感器所确定的总磁场的测量值减去针对励磁电流所确定的定子磁场的值;和
15.在位置确定步骤中,基于所生成的转子磁场的测量值来测定转子的位置。
16.由此实现的技术优点是,可以提供一种用于控制平面驱动系统的方法,该方法由于平面驱动系统的转子的精确的位置确定而能够实现对转子的改进的控制。
17.通过转子磁场的多次测量,通过定子模块的传感器模块的多个磁场传感器来执行转子相对于定子模块的位置确定。为此,多个磁场传感器以二维布置方式布置在定子模块上。基于转子磁场的多个测量值,可以推导出转子关于定子模块的相对定位。转子通过定子模块的定位通过产生相应的定子磁场、即定子模块的定子导体的磁场来实现。这使得布置在定子模块上的磁场传感器除了转子的转子磁场之外还测量定子模块的通过定子导体生成的定子磁场的叠加,因为传感器模块的磁场传感器这样与定子导体相邻地布置在定子模块上,使得磁场传感器除了转子磁场之外还测量定子磁场的基本部分。这导致转子磁场的测量值的失真并且因此导致转子相对于定子模块的位置确定的精确度的降低。
18.通过对定子磁场对由磁场传感器所获取的总磁场的测量值的贡献进行补偿,可以隔离转子磁场对所测量的总磁场的贡献,其中该总磁场包括转子磁场和定子磁场的叠加。由此能够通过多个磁场传感器精确地确定转子磁场。这又能够实现转子相对于定子模块的精确的位置确定。这又允许改进对转子的控制,因为所述转子能够以精确的方式定位在定子模块上的精确确定的位置处。
19.通过针对多个不同的励磁电流和针对磁场传感器的二维布置方式中的多个空间区域确定定子磁场的多个值,可以实现针对任意的励磁电流和定子模块上的任意的空间区
域补偿定子磁场的贡献。由此,又准确并且因此改进了对转子的位置确定并且与此相关联地改进了对于转子的控制。
20.针对具有多个定子模块的平面驱动系统,可以根据定子磁场确定步骤针对每个定子模块分别确定定子磁场的多个值,这些值按照根据本发明的方法来使用。替代地,可以针对定子模块确定定子磁场的多个值,所述定子磁场的多个值按照根据本发明的方法作为基准值用于多个定子模块。替代地,可以针对多个定子模块创建定子磁场的一组值,其中该组值中的每一个值对应于相应的定子场的单独地针对多个定子模块所创建的值的平均值。
21.在本技术的意义上,转子磁场是由平面驱动系统的转子生成的磁场。定子磁场在本技术的意义上是由平面驱动系统的定子模块的定子导体生成的磁场。
22.定子导体在本技术的意义上是可通电的、能导电的导体元件,其设置用于生成磁场。
23.励磁电流在本技术的意义上是施加在定子导体上的、用于生成定子磁场的电流强度。
24.定子磁场、转子磁场或总磁场的值在下面可以包括相应的磁场的场强、场方向或相应的磁通密度针对任意的空间点的幅度和/或角度。定子磁场的值尤其可以通过三个正交取向的矢量分量来表达,其中,通过三个矢量分量来确定定子磁场的平行于或反平行于三个预先定义的空间方向的分量。
25.下面,定子磁场可以是单个定子导体的磁场。替代地,定子磁场可以是不同定子导体的各个磁场的叠加。
26.根据一种实施方式,在第一定子磁场确定步骤中确定定子磁场的值通过传感器模块的多个磁场传感器的多个测量来执行。
27.由此实现的技术优点是,可以通过定子模块针对多个不同的励磁电流和定子模块上的多个空间区域来确定定子磁场的多个值。由此可以实现,在平面驱动系统的运行期间可以补偿定子磁场对总磁场的测量值的贡献。
28.为此,不同的定子磁场可以通过在定子模块的不同的定子导体上施加不同的励磁电流来生成,并且相应的测量值通过定子模块的传感器模块的多个磁场传感器在没有转子存在或没有转子磁场影响的情况下被获取。在相应的数据组中可以存储针对相应的励磁电流所获取的定子磁场的值。在平面驱动系统运行时或在操控转子时通过生成相应的定子磁场可确定和补偿该定子磁场对总磁场的由磁场传感器所获取的测量值的贡献。
29.由此,通过可以在平面驱动系统的运行期间在任意的时间执行针对定子模块的不同的励磁电流和不同的空间区域确定定子磁场,实现了补偿的高灵活性。因此,由运行引起的定子模块的定子磁场的改变可以在补偿中被考虑。由此可以进一步精确并且改进对转子的位置确定并且与此相关联地精确并改进对于转子的控制。
30.根据一种实施方式,在总磁场确定步骤中,针对每个磁场传感器确定总磁场的至少一个测量值;和
31.其中,在所述补偿步骤中,针对每个磁场传感器补偿所述定子磁场对总磁场的测量值的贡献,并且其中,针对每个磁场传感器,针对相应的磁场传感器的空间区域生成转子磁场的至少一个测量值。
32.由此实现这样的技术优点,即能够实现精确的位置确定并且与此相关联地实现对
于平面驱动系统的转子的精确控制。通过针对定子模块的传感器模块的每个磁场传感器,将总磁场的由相应的磁场传感器获取的测量值关于定子磁场对由磁场传感器获取的总磁场的测量值的贡献进行校正,可以针对每个磁场传感器,实现针对磁场传感器的相应的空间区域来精确地确定转子磁场。由此改进了转子磁场相对于定子模块的位置确定的精确性并且与此相关联地改进对于转子的控制。
33.根据一种实施方式,第一定子磁场确定步骤包括:
34.在模型确定步骤中确定定子导体的励磁电流和定子磁场之间的相关性的模型描述;
35.其中补偿步骤包括:
36.基于定子导体的励磁电流和定子磁场之间的相关性的所确定的模型描述,针对任意的励磁电流补偿定子磁场对总磁场的由磁场传感器所确定的测量值的贡献。
37.由此实现的技术优点是,实现平面驱动系统的转子的精确的位置确定和准确的控制。通过基于在定子磁场确定步骤中针对多个不同的励磁电流所确定的定子磁场值对定子模块的多个定子导体的励磁电流和定子磁场之间的相关性的模型描述,可以针对任意的励磁电流基于相应的模型描述来确定所属的定子磁场的值。
38.由此可以针对励磁电流来确定定子磁场,在定子磁场确定步骤中未针对所述励磁电流确定或测量相应的定子磁场的值。基于模型描述,可以相应地补偿任意的励磁电流的相应的定子磁场对由磁场传感器确定的总磁场的测量值的贡献。由此实现了对总磁场的通过磁场传感器确定的测量值的改进的补偿和校正,并且与此相关联地实现了对转子磁场的改进的确定,其方式是,可以补偿任意的励磁电流的定子磁场的贡献并且可以校正磁场传感器的相应的测量值。
39.根据一种实施方式,在模型确定步骤中,针对每个定子导体确定在施加在相应的定子导体上的励磁电流和由相应的定子导体产生的定子磁场之间的相关性的单独的模型描述,并且其中,在补偿步骤中,针对每个磁场传感器,基于所创建的模型,补偿定子磁场对总磁场的由相应的磁场传感器确定的测量值的贡献,并且确定转子磁场的测量值。
40.由此实现的技术优点是,能够实现精确的位置确定并且与此相关联地实现对平面驱动系统的转子的精确和准确的控制。通过针对定子模块的每个定子导体考虑励磁电流和由相应的定子导体生成的定子磁场之间的相关性的单独的模型描述,可以实现进一步精确地确定相应的定子磁场。
41.由此又可以改进对相应的定子磁场对总磁场的由磁场传感器测得的值的贡献的补偿。这又有助于基于各个磁场传感器的测量值来改进地确定转子磁场。这又引起改进的位置确定并且与之相关地引起对平面驱动系统的转子的改进的控制。
42.根据一种实施方式,在模型确定步骤中,施加在相应的定子导体上的励磁电流和由相应的定子导体产生的定子磁场之间的相关性的模型描述包括相应地经过训练的神经网络,其中,相应地经过训练的神经网络设置用于针对任意的定子导体并且针对任意的磁场传感器的任意的空间区域的任意的励磁电流来确定相应的定子磁场的值。
43.由此实现的技术优点是,针对每个定子导体和针对传感器模块的磁场传感器的空间区域的多个不同的励磁电流可以精确地确定预期的定子磁场。
44.根据一种实施方式,补偿步骤中的补偿通过相应地经过训练的神经网络来执行,
其中,相应地经过训练的神经网络设置用于针对每个磁场传感器补偿定子磁场对总磁场的由相应的磁场传感器确定的测量值的贡献,并且确定转子磁场的测量值。
45.由此实现这样的技术优点,即针对每个磁场传感器可以实现定子导体的定子磁场的影响的精确补偿。
46.替代地,可以使用多个不同的训练的神经网络。尤其是,单独训练的神经网络可以用于每个定子模块。
47.根据一种实施方式,根据本发明的方法还包括:
48.在校准步骤中校准定子导体。
49.由此实现的技术优点是,实现了定子模块的定子磁场的更好的确定和平面驱动系统的转子的更好的控制。通过校准各个定子导体,可以针对每个定子导体精确地确定所施加的励磁电流和由相应的定子导体所产生的定子磁场之间的关系。由此,通过施加相应的励磁电流可以针对每个定子导体精确地生成所期望的定子磁场。这能够实现尽可能精确地操控转子,其方式是,能够生成准确期望的定子磁场,所述定子磁场是为了将转子定位在定子模块上的确定的位置中所需要的。此外,定子磁场的精确生成使得能够在定子磁场确定步骤中更精确地确定定子模块的定子磁场,并且与之相关地能够更精确地将相应的定子磁场对由磁场传感器测量的总磁场的测量值的贡献进行补偿。因此,通过定子导体的校准又能够通过定子模块的传感器模块的磁场传感器的测量值实现转子的更精确的位置确定。
50.根据一种实施方式,校准步骤包括:
51.在目标定子磁场确定步骤中针对用于多个定子导体的多个目标励磁电流确定多个目标定子磁场,其中定子导体的目标定子磁场对应于具有与用于相应的目标励磁电流的相应的定子导体相同的参数的理想的基准导体的磁场;
52.在生成步骤中基于目标励磁电流生成定子导体的真实的定子磁场,其中,定子导体的真实的定子磁场是由相应的定子导体针对相应的目标励磁电流生成的磁场;
53.在第二定子磁场确定步骤中针对多个定子导体的目标励磁电流确定真实的定子磁场的值;
54.在对应步骤中针对多个定子导体定义在目标励磁电流和相应的真实的定子磁场之间的对应关系;和
55.在励磁电流确定步骤中针对所述多个定子导体基于对应关系来确定真实的励磁电流,其中,定子导体的真实的励磁电流相应于目标励磁电流,针对所述目标励磁电流,相应的定子导体产生相应的真实的定子磁场。
56.由此实现这样的技术优点,即实现了定子导体的精确校准。由此又实现了平面驱动系统的转子的更好的位置确定和更好的控制。通过校准各个定子导体,可以考虑并且校正各个定子导体的特性中或定子导体在定子模块上的定位中的由生产引起的不规则性。通过针对每个定子导体确定在所施加的励磁电流和所生成的定子磁场之间的单独的关系,可以针对每个定子导体与在各个定子导体的设计方案中或者在各个定子导体在定子模块中的定位中由生产引起的不规则性无关地进行由相应的定子导体生成的定子磁场的准确确定。因此,针对每个定子模块来说,能够准确地生成所期望的定子磁场,需要所述定子磁场以用于控制转子并且用于将转子相对于定子模块定位在所期望的位置中。由此能够实现平面驱动系统的更好的控制。
57.根据一种实施方式,在第二定子磁场确定步骤中通过传感器模块的多个磁场传感器的多个测量来确定真实的定子磁场值。
58.由此实现这样的技术优点,即实现了根据本发明的方法的提高的灵活性和可用性。通过在第二定子磁场确定步骤中由定子模块的传感器模块的磁场传感器执行真实的定子磁场的确定,定子导体的校准可以由定子模块执行。因此,可以针对平面驱动系统的已经安装的定子模块,在已经安装的状态下执行定子模块的相应的定子导体的校准。因此,定子模块的定子导体的校准同样可以在平面驱动系统的运行期间执行。
59.根据一种实施方式,根据本发明的方法还包括:
60.在传感器校准步骤中校准磁场传感器。
61.由此实现的技术优点是,能够实现平面驱动系统的转子的精确的位置确定并且与此相关联地实现精确的控制。通过校准磁场传感器,可以改进磁场传感器的总磁场的测量值的精确度。利用磁场传感器的测量值的更高的精确度,可以通过传感器模块的磁场传感器更好地确定转子磁场。由此可以通过磁场传感器的测量并且与此相关联地通过平面驱动系统的转子的控制来改进转子的位置确定。
62.根据一种实施方式,校准步骤包括:
63.在第一基准磁场生成步骤中生成第一基准磁场,其中,针对定子模块的多个空间区域,第一基准磁场的值是已知的;
64.在第一基准磁场确定步骤中,通过多个磁场传感器针对定子模块的多个空间区域来测定基准磁场的测量值;
65.在偏离确定步骤中,针对多个磁场传感器测定在相应的空间区域中基准磁场的通过磁场传感器测定的测量值与基准磁场的已知值的偏差;
66.在校正步骤中基于总磁场和/或转子磁场和/或定子磁场的通过磁场传感器测定的测量值的所测定的偏差来校正。
67.由此实现的技术优点是,可以实现磁场传感器的精确校准并且与此相关联地实现磁场传感器的测量值的精确度的改进。通过针对传感器模块的每个磁场传感器确定在实际施加的磁场和真实通过磁场传感器测量的磁场之间的关系,可以执行传感器模块的每个单个磁场传感器的精确校准。各个磁场传感器的校准在此能够实现精确地确定通过相应的磁场传感器测量的磁场。由此,通过传感器模块的各个磁场传感器能够实现精确地确定转子磁场。由此又可以实现精确的位置确定并且与此相关联地实现对转子的精确控制。
68.根据一种实施方式,传感器校准步骤还包括:
69.在温度确定步骤中测定定子模块的多个不同的温度;
70.在第二基准磁场生成步骤中生成第二基准磁场,其中,第二基准磁场的值针对多个空间区域是已知的;
71.在第二基准磁场确定步骤中,通过多个磁场传感器针对多个温度和多个空间区域来测定第二基准磁场的多个测量值;
72.在相关性确定步骤中,基于所述第二基准磁场的值测定通过所述磁场传感器确定的第二基准磁场的测量值的温度相关性;和
73.在校正步骤中基于所测定的温度相关性校正总磁场和/或转子磁场和/或定子磁场的通过磁场传感器测定的测量值。
74.由此实现的技术优点是,可以提供转子的精确的位置确定并且与之相关地提供转子的精确控制。通过考虑定子模块的温度并且与之相关地考虑传感器模块的各个磁场传感器的温度,可以考虑对各个传感器的温度影响并且考虑各个磁场传感器的测量值的与之相关的失真。
75.由此可以提高各个磁场传感器的精确度。通过针对每个磁场传感器确定传感器模块的温度或磁场传感器的温度之间的关系以及所施加的磁场和由相应的磁场传感器测量的测量值之间的偏差,可以在平面驱动系统的运行中针对每个磁场传感器考虑对总磁场的由磁场传感器测量的测量值的相应的温度影响并且校正相应的测量值。因此,能够抑制传感器模块的各个磁场传感器的测量值的由温度引起的失真。
76.由此可以提高传感器模块的各个磁场传感器的测量的精确度。与此相关联地,通过测量传感器模块的各个磁场传感器能够提高转子磁场的确定的精确度。由此又可以精确和改进位置确定并且与此相关联地精确和改进对于转子的控制。
77.根据一种实施方式,第一基准磁场和/或第二基准磁场是转子的转子磁场或定子模块的定子磁场。
78.由此实现的技术优点在于,可以通过在平面驱动系统的运行中执行传感器模块的磁场传感器的校准来实现位置确定或转子控制的精确度的提高。通过使得用于校准传感器模块的各个磁场传感器所需的第一和第二基准磁场由转子的转子磁场或各个定子导体或定子模块的定子磁场来生成,可通过已经安装的且处于运行中的定子模块或通过平面驱动系统的所属的转子来执行磁场传感器的校准和对磁场传感器的温度影响的考虑。通过由转子的转子磁场或定子模块的定子磁场提供第一和第二基准磁场,可以省去外部的磁场源或外部校准组件,借助该外部校准组件来产生第一和第二基准磁场。由此提高了传感器校准的灵活性。
79.通过包括确定传感器的温度特性在内对传感器模块的磁场传感器进行校准,可以考虑并且校正在制造磁场传感器时出现的传感器内部的故障或者说定子模块的传感器模块中的相应的磁场传感器的错误定位。
80.根据一种实施方式,该方法还包括:在改变步骤中针对多个空间区域改变所述第一基准磁场和/或所述第二基准磁场。
81.由此实现这样的技术优点,即可以改进传感器模块的磁场传感器的校准。通过针对磁场传感器的空间区域改变第一和/或第二基准磁场,可以针对多个不同的基准磁场产生用于校准磁场传感器的详细的数据组。由此可以使磁场传感器的校准精确。第一和第二基准磁场的改变在此可以包括磁场强度以及磁场方向或磁通密度针对任意的空间点的幅度和角度的改变。
82.根据一种实施方式,根据本发明的方法还包括:
83.在校准文件创建步骤中创建校准文件,其中所述校准文件包括在所述定子磁场确定步骤中确定的值和所测定的信息和/或在所述校准步骤中确定的值和所测定的信息和/或在所述传感器校准步骤中确定的值和所测定的信息。
84.由此实现这样的技术优点,即,各个方法步骤的确定的值和所测定的信息可被存储并且被重新用于各个部件的重新校准。由此可以在重新执行时简化和加速该方法。当在定子磁场确定步骤、校准步骤和传感器校准步骤中再次执行该方法时,校准文件的值和信
息可以用作相应的值和信息。尤其是,校准文件可以包括模型描述,尤其是数学函数或相应经训练的神经网络,其被设置用于能够针对任意的定子导体和针对任意的磁场传感器的任意的空间区域的任意的励磁电流确定相应的定子磁场值。
85.替代地,定子磁场确定步骤、校准步骤和传感器校准步骤可以在工厂执行,使得平面驱动系统的用户可以基于所创建的校准文件执行根据本发明的方法,并且尤其是利用校准文件的相应的值和信息来执行定子磁场确定步骤、校准步骤和传感器校准步骤,其中用户可以例如从服务器下载所述校准文件。在此,在特定的校准文件和一个定子模块之间的连接可以通过明确的标识号来建立,该标识号分别存储在定子模块上和校准文件中。替代地,校准文件可以被存储在相应的定子模块本身中。校准文件还可在服务器和/或控制单元和/或定子模块之间交换。
86.根据本发明的第二方面,提供了一种平面驱动系统,其中,该平面驱动系统包括至少一个控制单元、定子模块和转子,其中,该控制单元通过至少一个数据连接与定子模块相连,其中,该定子模块包括多个可通电的定子导体,以用于产生用来电控制转子的定子磁场,其中,转子具有用于生成转子磁场的磁体组件,其中,通过定子磁场和转子磁场能实现转子和定子模块之间的磁性耦合,其中,为了确定转子的位置,定子模块包括具有多个磁场传感器的传感器模块,其中,这些磁场传感器以二维布置方式布置在定子模块上或定子模块中,其中,每个磁场传感器设置用于确定转子磁场的二维布置的空间区域,并且其中,控制单元被设置用于实施根据本发明的用于控制平面驱动系统的方法。
87.由此可以提供一种平面驱动系统,其具有精确的和改进的控制并且被设置用于实施具有所述优点的根据本发明的方法。
附图说明
88.借助附图进一步阐述本发明。在此示出:
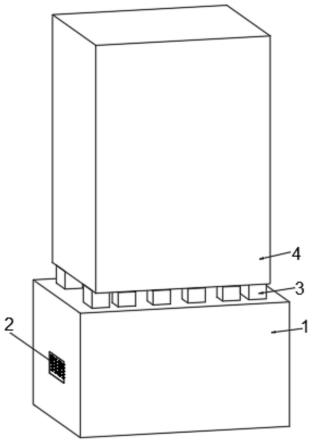
89.图1示出了根据一种实施方式的具有定子模块和转子的平面驱动系统的示意图;
90.图2示出了根据一种实施方式的定子模块的传感器模块的示意性的和透视性的视图;并且
91.图3示出了根据另一种实施方式的转子的下侧的示意图;
92.图4示出了根据一种实施方式的用于控制平面驱动系统的方法的流程图;
93.图5示出了根据一种实施方式的用于控制平面驱动系统的方法的另一流程图;
94.图6示出了根据一种实施方式的用于控制平面驱动系统的方法的另一流程图;并且
95.图7示出了根据一种实施方式的用于控制平面驱动系统的方法的另一流程图。
具体实施方式
96.图1示出了具有定子模块300和转子400的平面驱动系统200的示意图。
97.根据图1中的实施方式,平面驱动系统包括控制单元201、定子模块300和转子400。控制单元201通过数据连接203与定子模块300连接。控制单元201被设置用于实施根据本发明的用于控制平面驱动系统200的方法。
98.根据本发明的用于控制平面驱动系统200的方法和工作方式的详细描述参见对图
4至图7的描述。
99.定子模块300具有平坦的定子表面303。平坦的定子表面303布置在定子模块壳体305的上侧。转子400被布置在定子表面303上方。定子表面303是用于转子400的电驱动器的定子单元307的一部分。具有定子表面303的定子单元307能够实施为电路板。定子表面303构造为正方形。
100.转子400在定子表面303上方至少沿第一方向507和第二方向509是可驱动的。定子表面303具有多个定子导体309,所述定子导体309在图1的实施方式中构造为导体条,并且所述定子导体基本上沿着第一方向507定向。定子导体309构造为是导电的并且能够通电,使得转子400被驱动。在定子导体309之间设置有定子导体间隙311,通过该定子导体间隙,定子导体309彼此电绝缘。在定子表面303下方可设置定子导体的另一布置,在其中定子导体309基本上沿着第二方向509定向。
101.在定子模块壳体305中布置有用于驱动和用于控制转子400的电子模块(未示出)。电子模块例如可以包括用于产生驱动电流的功率模块和用于控制功率模块和驱动电流的控制模块。在定子模块壳体305的与定子表面303相对置的定子模块下侧332上布置有未示出的接头,以用于将定子模块300与多个联接线路315连接。联接线路315例如可以包括用于传输用于控制模块的控制信号的控制线路和用于给功率和/或控制模块供应电能的能量供应线路。尤其是可以通过能量供应线路将用于产生驱动电流的电能输送给功率模块。
102.定子模块壳体305、定子单元307和定子表面303在定子表面303的俯视图中构造成矩形、尤其正方形。
103.定子模块壳体305具有剖切平面313。在剖切平面313的高度上,可以在定子模块壳体305内部布置传感器模块。
104.图2示出了用于检测转子400在平面驱动系统200中的位置的传感器模块500的透视图。传感器模块500是直角的并且具有磁场传感器501在定子模块300的载体302上的二维布置。磁场传感器501因此被布置在载体302上。磁场传感器501的二维布置具有磁场传感器501的第一周期性栅格503和磁场传感器501的第二周期性栅格505。第一栅格503的磁场传感器501通过圆形符号表示,而第二栅格505的磁场传感器501通过四边形符号表示。替代地,传感器模块500也可以设计为正方形、平行四边形或者其他形状。
105.如果下面一般性地提到磁场传感器501,那么使用附图标记501。
106.第一磁场传感器511以实线连接,以阐明第一栅格503的栅格结构。第二磁场传感器513以虚线连接,以阐明第二栅格505的栅格结构。第一磁场传感器511和第二磁场传感器513在此可以是相同的,圆形的或有角的符号应该仅象征属于相应的子组件的磁场传感器501的位置。
107.第一栅格503和第二栅格505相同地构造并且彼此偏移。由此,第二栅格505的第二磁场传感器513和第一栅格503的第一磁场传感器511分别彼此偏移。
108.在图2中示出的磁场传感器501的布置仅用于图解说明并且可以与在图2中示出的形式不同。
109.磁场传感器501分别被设置用于确定空间区域502的磁场。因此,对磁场传感器501的测量被限制于相应的磁场传感器501的相应的空间区域502。在图2的实施方式中,空间区域502被示出为矩形或正方形的面。这仅是为了说明。磁场传感器501的空间区域502也可以
具有几何上不同地设计的空间扩展并且例如设计为圆形。尤其是,空间区域502可以点状地设计,使得通过磁场传感器502,可以执行相应的磁场的点测量,其中各个磁场传感器502仅仅测量直接布置在相应的磁场传感器501的位置处的相应磁场的场贡献。
110.载体302是平坦的,使得磁场传感器501被布置在平面中,即以二维布置方式布置。
111.磁场传感器501可以被构造为霍尔传感器。尤其是,磁场传感器501可以被构造为2d或3d霍尔传感器,其中,3d霍尔传感器测量在三个线性独立的空间方向上的磁场分量。这些空间方向尤其可以包括第一方向507和第二方向509以及垂直于第一方向507和第二方向509的第三方向。
112.载体302可以被构造为电路板和/或印刷电路板。这使得载体302容易被提供。
113.磁场传感器501的布置可以包括两个栅格503、505的恰好两个子布置方式。
114.图3以从下方观察转子400的下侧的视图示出平面驱动系统200的转子400。在平面驱动系统200的运行中,转子400的下侧朝向定子模块300的定子表面303地布置。转子400在下侧具有磁体组件401。磁体组件401被构造为矩形的,尤其是正方形的,并且包括多个磁体。转子400的下侧,尤其是在磁体组件401的磁体的区域中,被构造成平坦的或平面的。在运行中,具有磁体组件401的转子400的下侧基本上平行于定子表面303取向并且被布置为朝向定子表面303。
115.磁体组件401包括第一磁体单元411、第二磁体单元413、第三磁体单元415和第四磁体单元417。第一磁体单元411和第三磁体单元415分别具有在第一转子方向407上并排布置的并且沿着垂直于第一转子方向407取向的第二转子方向409伸展的长形的驱动磁体。第二磁体单元413和第四磁体单元417分别具有在第二转子方向409上并排布置的并且沿着第一转子方向407伸展的长形的驱动磁体。第一磁体单元411和第三磁体单元415在运行中用于在第一转子方向407上驱动转子400,而第二磁体单元413和第四磁体单元417在运行中用于在第二转子方向409上驱动转子400。另外,第一磁体单元411、第二磁体单元413、第三磁体单元415及第四磁体单元417用于在与定子表面303垂直且与第一方向507及第二方向509垂直的方向上进行驱动。
116.在磁体组件401的中心,转子400具有自由面403,所述自由面403不被磁体组件401的磁体覆盖。在自由面403的区域中,转子400具有固定结构405。替代地,可以在所述自由面403中布置另外的部件。
117.图4示出了根据一种实施方式的用于控制平面驱动系统200的方法100的流程图。
118.用于控制平面驱动系统200的方法100可应用于根据图1至图3的实施方式的平面驱动系统200。
119.根据图4中的实施方式,平面驱动系统200包括至少一个控制单元201、定子模块300和转子400,其中,定子模块300包括多个可通电的定子导体309,以用于产生用于电控制转子400的定子磁场,其中,转子400具有用于生成转子磁场的磁体组件401,其中,通过定子磁场和转子磁场可实现转子400与定子模块300之间的磁性耦合,其中,定子模块300为了确定转子400的位置而包括具有多个磁场传感器501的传感器模块500,其中,磁场传感器501以二维布置方式布置在定子模块300上,并且其中,每个磁场传感器501设置用于针对以二维布置方式的空间区域502确定转子磁场。
120.根据图4中的实施方式,方法100包括以下方法步骤:
121.在第一定子磁场确定步骤101中,针对多个不同的励磁电流以及针对磁场传感器501的二维布置方式中的多个空间区域502来确定定子磁场的多个值;
122.在定子磁场生成步骤103中,通过将相应的励磁电流施加到相应的定子导体309上来生成至少一个定子磁场,以用于电控制转子400;
123.在总磁场确定步骤105中,针对传感器模块500的多个空间区域502通过多个磁场传感器501来确定总磁场的多个测量值,以测定转子400的位置,其中,所述总磁场包括所述多个定子磁场和转子磁场的叠加;
124.在补偿步骤107中,补偿定子磁场对由磁场传感器501确定的总磁场的测量值的贡献并且生成由相应的磁场传感器501针对相应的空间区域502所确定的转子磁场的测量值,其中所述补偿包括从由磁场传感器501所确定的总磁场的测量值减去针对励磁电流所确定的定子磁场的值;和
125.在位置确定步骤109中,基于所生成的转子磁场的测量值来测定转子400的位置。
126.根据图4中的实施方式,在第一定子磁场确定步骤101中,针对多个不同的励磁电流和磁场传感器的二维布置方式中的多个空间区域502确定定子磁场的多个值。
127.为了确定定子磁场的多个值,例如可以将不同的励磁电流施加到定子模块300的多个定子导体309上,以便因此通过相应的定子导体309生成相应的定子磁场。所生成的定子磁场可以随后针对定子模块300的不同的空间区域502来测量并且因此针对不同的励磁电流来确定不同的定子磁场的值。例如,定子磁场的测量可以由传感器模块500的磁场传感器501执行。因此,针对磁场传感器501的每个空间区域502,可以为不同励磁电流确定不同的定子磁场的多个测量值。
128.针对不同励磁电流的定子磁场的多个值可以被包括在一个数据组或多个数据组中,并且例如存储在平面驱动系统200的控制单元201中。因此,在相应的数据组中可以记录在施加在定子模块300的各个定子导体309上的励磁电流和在磁场传感器501的二维布置的空间区域502中测量的定子磁场的值之间的关系。施加的励磁电流与在相应的空间区域502中测量的定子磁场值之间的关系可以稍后用于补偿定子磁场对通过磁体传感器501在相应的空间区域502中的总磁场的测量值的贡献。
129.替代地,可以针对定子模块300的仅仅一个空间区域502,为不同的励磁电流执行不同定子磁场的多次测量,并且因此针对特定的空间区域502生成不同定子磁场的多个值。基于针对磁场传感器501的二维布置方式中的一个特定的空间区域502的不同励磁电流的不同定子磁场的这些值,可以根据事先确定的空间映射针对不同的空间区域502来外推出定子磁场的值。因此,基于能够在针对一个空间区域502确定的定子磁场的值的基础上为任意的其它空间区域502预测定子磁场的相应值的空间映射,针对磁场传感器501的二维布置的任意的空间区域502,能够为任意的励磁电流生成定子磁场的值。这些值同样可以存储在一个数据组或多个数据组中并且用于补偿。
130.针对定子模块300的任意的空间区域502的不同定子磁场的值的映射和生成例如可以在使用相应地经过训练的神经网络的情况下执行。这使得能够基于不同的定子磁场的值针对定子模块300的任意的数量的空间区域502来预测定子磁场的相应的值,所述不同的定子磁场的值针对一空间区域502或针对较少数量的空间区域502来确定。
131.作为在数据组中记录的、励磁电流和定子模块300的不同空间区域502的相应定子
磁场的值之间的离散关系的替代方案,可以测定励磁电流和定子磁场之间的相关性的相应的模型描述,尤其是励磁电流和定子模块300的单个空间区域502的定子磁场的值之间的相关性的相应的模型描述。这样测定的模型描述使得能够针对任意的励磁电流,尤其是针对在对多个定子磁场进行测量时未考虑的励磁电流来确定不同定子磁场的值。
132.针对定子模块300的多个定子导体309可以执行针对不同的励磁电流确定不同的定子磁场的值。尤其是,可以针对定子模块300的每个单个的定子导体309相应地为不同的励磁电流来确定不同的定子磁场。
133.针对定子模块300的所有空间区域502,可以为不同的励磁电流来执行确定不同定子磁场的值。替代地,针对不同的励磁电流来确定不同的定子磁场的值可以仅针对之前选择的多个空间区域502来执行,所述空间区域针对转子400的位置确定或者说控制具有提高的相关性。
134.为了确定不同空间区域502的定子磁场的值,可以执行相应的空间区域502的传感器模块500的各个磁场传感器501的测量。为此,尤其可以针对每个空间区域502通过相应的磁场传感器501获取相应的多个测量值。替代地,测量值仅仅可以针对特定的多个空间区域502通过相应的磁场传感器501获取。替代地,不同的定子磁场的测量值可以通过传感器针对不同的空间区域502获取,这些传感器不是定子模块300的传感器模块500的磁场传感器501。例如,可以通过外部的传感器测量组件来执行测量并且由此确定不同的定子磁场的多个值。
135.除了控制单元201之外,所创建的数据组(其具有不同定子磁场的针对不同励磁电流和定子模块300的不同空间区域502的特定值)可以被存储在平面驱动系统200的其他数据处理单元或数据存储单元中。
136.第一定子磁场确定步骤101可以在平面驱动系统200,尤其是定子模块300的投入运行之前执行。例如,根据第一定子磁场确定步骤101的定子磁场的确定可以在工厂在相应部件、尤其是定子模块300的生产之后执行。替代地,可以在平面驱动系统200投入运行之后并且针对已经安装的定子模块300执行不同定子磁场的值的确定。尤其是,在平面驱动系统200的运行期间,可以根据第一定子磁场确定步骤101来执行定子磁场的值的确定。例如,可在平面驱动系统200的每次投入运行或启动时执行根据第一定子磁场确定步骤101的相应的确定。替代地,第一定子磁场确定步骤101可以根据预定的时间表来执行,例如在维护平面驱动系统200的过程中执行。
137.在执行第一定子磁场确定步骤101之后,在定子磁场生成步骤103中,通过将相应的励磁电流施加到定子模块300的多个定子导体309上来生成用于控制转子400的定子磁场。通过将励磁电流施加到相应的定子导体309上以及由此引起相应的定子磁场的生成,可以实现转子400在定子模块300上的相应的定位。为了通过相应生成的定子磁场来精确地定位转子400,需要转子400相对于定子模块300的位置确定。
138.为此,在总磁场确定步骤105中,总磁场的多个测量值通过多个磁场传感器501针对定子模块300的相应的空间区域502来获取。在总磁场确定步骤105中由磁场传感器501获取测量值用于针对分别获取测量值的磁场传感器501的相应的空间区域502来确定转子400的转子磁场的值。然而,通过由定子模块300操控相应的定子磁场来操控转子400,磁场传感器501不能仅仅测量转子400的转子磁场。
139.取而代之,磁场传感器501测量总磁场,所述总磁场除了转子400的转子磁场之外还包括定子模块300的定子磁场的叠加。由于转子磁场与用来控制转子400所需的定子磁场叠加,通过磁场传感器501使得转子磁场的测量值失真。由此,由于转子400的转子磁场的磁场传感器501的针对相应的磁场传感器501的空间区域502的失真的测量值而使得转子400相对于定子模块300的位置确定变得困难。因此,为了针对相应的空间区域502由单个磁场传感器501的总磁场的测量值来确定转子磁场,必须对定子磁场对各个磁场传感器501的测量值的贡献进行补偿。
140.为此,在补偿步骤107中,针对定子模块300的相应的空间区域502,对定子模块300的定子磁场对总磁场的由磁场传感器501确定的测量值的贡献进行补偿。在此,补偿包括从在总磁场确定步骤105中针对相应的空间区域502确定的总磁场的测量值中减去在第一定子磁场确定步骤101中针对相应的空间区域502确定的定子磁场的值。由于定子磁场和转子磁场的相加,通过从针对空间区域502测得的、总磁场的测量值中减去在第一定子磁场确定步骤101中针对相应的空间区域502确定的定子磁场值,可以针对相应的空间区域502生成转子磁场的值。
141.为此,例如可以将针对各个空间区域502通过相应的磁场传感器501获取的总磁场的测量值组合成相应的数据组,并且例如通过控制单元201利用在第一定子磁场确定步骤101中生成的定子磁场值的相应数据组对针对相应的空间区域502生成的数据组进行处理。替代地,补偿可以除了控制单元201之外通过平面驱动系统200的另一个数据处理单元来执行。因此,不同定子磁场对各个磁场传感器501的总磁场的测量值的贡献的补偿以及与此相关联地针对相应的空间区域502生成转子磁场的值可以在总磁场的每次测量之后通过相应的磁场传感器501来执行。所获取的测量值到控制单元201的相应的数据传输可以通过数据连接203来实现。
142.对定子磁场对通过各个磁场传感器501测量的总磁场的测量值的贡献的补偿包括对磁场强度或测量的磁通密度的幅度的补偿以及对磁场方向的贡献的补偿或测量的磁通密度的角度的贡献的补偿。因此,在补偿步骤107中生成的转子磁场的值在磁场强度或幅度方面以及在磁场方向或角度方面由定子磁场的各自贡献来调整。由此,能够精确地针对定子模块300的各个空间区域502来确定转子磁场。
143.在补偿步骤107中生成转子磁场的值之后,在位置确定步骤109中基于针对定子模块300的各个空间区域502生成转子磁场的值来执行转子400相对于定子模块300的位置确定。通过磁场传感器501的在补偿步骤107中调整的测量值(其在成功补偿之后显示转子400的转子磁场的经调整的值),能够实现精确的位置确定并且与此相关联地基于针对定子模块300的相应的空间区域502的所测量的转子磁场的值实现对转子400的精确的定位并且因此实现对转子的精确控制。
144.图5示出了根据一种实施方式的用于控制平面驱动系统200的方法100的另一流程图。
145.在图5中所示的实施方式基于图4中的实施方式并且包括图4中的实施方式的所有方法步骤。为了避免不必要的重复,以下不再详细描述针对图4描述的方法步骤。
146.与图4中的实施方式不同,图5中的实施方式还具有用于校准定子模块300的定子导体309的校准步骤113。在图5中的实施方式中,校准步骤113为此包括目标定子磁场确定
步骤115。在目标定子磁场确定步骤115中,针对多个定子导体309的多个目标励磁电流确定多个目标定子磁场。在此,定子导体309的目标定子磁场对应于理想的基准导体的磁场,该基准导体具有与用于相应的目标励磁电流的相应的定子导体309相同的参数。在此,定子导体309在其构造为线圈时的参数可以是定子导体309的导体材料的特性或定子导体309的绕组的特性。
147.因此,目标定子磁场对应于如下磁场,该磁场针对理想的定子导体309来说对于相应地施加在定子导体309上的目标励磁电流是预期的。“理想地”在这种情况下意味着,相应的定子导体309不具有由生产引起的不精确性或与其限定的特性的偏差。此外,理想的定子导体309准确地布置在定子模块300上的期望的位置处,从而该定子导体同样不具有由位置引起的偏差。
148.在目标定子磁场确定步骤115中,可以针对定子模块300的所有定子导体309确定相应的目标定子磁场。替代地,可以不同地仅仅针对所选择的多个定子导体309确定相应的目标定子磁场。可以针对任意数量的不同的目标励磁电流来确定目标定子磁场。目标定子磁场可以在目标定子磁场确定步骤115中例如通过在相应的理想的基准导体处的相应的测量来执行。
149.在目标定子磁场确定步骤115中确定目标定子磁场之后,在生成步骤117中基于目标励磁电流生成真实的定子磁场。在此,定子导体309的真实的定子磁场是在通过相应的定子导体309施加相应的目标励磁电流时实际上生成的磁场。如果相应的定子导体309不是理想的基准导体,则相应的定子导体309的真实的定子磁场与在目标定子磁场确定步骤115中针对相应的目标励磁电流所确定的目标定子磁场有偏差。偏差尤其不仅可以以磁场强度或所测量的磁通密度的幅度的形式出现,而且也可以以磁场方向或所测量的磁通密度的角度针对任意的空间点出现。目标定子磁场以及真实的定子磁场可以包括均匀和/或不均匀的场分量。因此,在生成步骤117中,通过目标定子磁场确定步骤115中的施加相应的目标励磁电流,针对定子模块300的各个定子导体309生成真实的定子磁场。
150.在第二定子磁场确定步骤119中确定在生成步骤117中生成的真实的定子磁场的值。这例如可以通过传感器模块500的多个磁场传感器501的多个测量来进行。替代地,在第二定子磁场确定步骤119中对真实的定子磁场值的确定也可以通过外部的传感器单元、也就是说通过不是传感器模块500的磁场传感器501的传感器单元来执行。
151.在对应步骤121中,针对多个定子导体309定义了在目标励磁电流和相应的真实的定子磁场之间的对应关系,这些真实的定子磁场在第二定子磁场确定步骤119中已被确定。通过所定义的对应关系,针对多个定子导体309中的每一个,为目标励磁电流中的每一个,可以确定相应的定子导体309的真实的定子磁场。通过针对多个定子导体309中的每一个分别在目标励磁电流和相应的真实的定子磁场之间进行对应关系,可以关于由相应的定子导体309生成的真实的定子磁场来操控每个定子导体309,其方式是,向相应的定子导体309施加相应的目标励磁电流。
152.随后,在励磁电流确定步骤123中,基于在对应步骤121中确定的、针对多个定子导体309中的每一个定子导体的对应关系来确定相应的真实的励磁电流。定子导体309的真实的励磁电流在此对应于目标励磁电流,该目标励磁电流有待施加到相应的定子导体309上,以便生成相应的定子导体309的相应的真实的定子场。
153.在励磁电流确定步骤123中定义的真实的励磁电流和在第二定子磁场确定步骤119中确定的针对多个定子导体309中的每一个定子导体的真实的定子磁场可以组合在相应的数据组中。基于这些数据组,通过施加真实的励磁电流,可以相应地操控多个定子导体309中的每一个,以便产生具有期望的场强和方向的相应的定子导体309的相应的真实的定子磁场。所产生的数据组例如可以存储在平面驱动系统200的控制单元201中以用于操控定子模块300。
154.替代地,数据组能够存储在定子模块300的控制模块中。存储在数据组中的真实的定子磁场的值可以包括定子磁场的磁场强度的值或相应测量的磁通密度的幅度的值和定子磁场的磁场方向的值或测量的磁通密度的角度的值。
155.通过定子模块300的定子导体309的校准能够通过如下方式产生对转子400的精确控制,即,能够通过将相应的真实的励磁电流施加到相应的定子导体309上准确地生成所期望的定子磁场。
156.与图4中的实施方式不同,在图5中的实施方式中,第一定子磁场确定步骤101包括模型确定步骤111。在该模型确定步骤111中,确定各个定子导体309的励磁电流和定子磁场之间的相关性的模型描述。基于模型描述,可以为各个定子导体309的任意的励磁电流确定定子磁场。可以基于在模型确定步骤111中确定的模型描述来执行在补偿步骤107中对定子导体309的定子磁场的贡献的补偿。
157.模型描述例如可以包括数学函数或数学关系,借助所述数学函数或数学关系能够实现励磁电流和定子磁场之间的对应关系。基于模型描述,可以针对任意的定子导体309和针对任意的空间点,尤其是针对任意的磁场传感器501的任意的空间区域502,确定相应的定子磁场的预期值。
158.根据一种实施方式,模型描述可以包括至少一个相应地经过训练的神经网络。替代地,模型描述可以包括多个相应地经过训练的神经网络。借助神经网络可以创建励磁电流和定子磁场之间的对应关系。替代地,可以借助相应地经过训练的神经网络针对任意的定子导体309和针对任意的空间点,尤其是针对任意的磁场传感器501的任意的空间区域502确定相应的定子磁场的期望值。神经网络在此可以利用所描述的数据组来训练。
159.此外,通过定子导体309的校准,可以校正由于所施加的励磁电流的有错误的电流测量而引起的由定子导体309生成的真实磁场的偏差。
160.图6示出了根据另一种实施方式的用于控制平面驱动系统200的方法100的另一流程图。
161.图6中的实施方式基于图4中的实施方式并且包括图4中示出的实施方式的所有方法步骤。为了避免不必要的重复,以下未详细描述针对图4描述的方法步骤。
162.与图4中的实施方式不同,图6中的实施方式还包括传感器校准步骤125。在该传感器校准步骤125中,校准传感器模块500的磁场传感器501。
163.为此,传感器校准步骤125包括第一基准磁场生成步骤127。在第一基准磁场生成步骤127中,生成第一基准磁场。针对第一基准磁场,定子模块300的多个空间区域502的值是已知的。第一基准磁场可以是例如转子400的转子磁场。替代地,第一基准磁场可以是定子模块300的定子磁场。替代地,第一基准磁场可以是外部的磁场布置方式的磁场,针对该外部的磁场布置方式,定子模块300的相应的空间区域502的值是已知的。例如,外部的磁场
布置方式可以是具有生成已知特性的磁场的磁场源的试验布置方式。
164.在生成第一基准磁场之后,在第一基准磁场确定步骤129中,针对定子模块300的多个空间区域502确定第一基准磁场的多个测量值。这通过由定子模块300的相应的空间区域502的相应的磁场传感器501获取多个测量值来引起。为此,转子400例如可以经由定子模块300运动,并且可以通过传感器模块500的相应的磁场传感器501针对磁场传感器501的相应的空间区域502来获取转子400的转子磁场的测量值。替代地,可以将相应的励磁电流施加到定子模块300的相应的定子导体309上,以便生成相应的定子磁场,所述定子磁场由相应的磁场传感器501针对相应的空间区域502来测量。
165.在通过多个磁场传感器501创建第一基准磁场的测量值之后,在偏差确定步骤131中,针对多个磁场传感器501,确定通过磁场传感器501测定的基准磁场的测量值与第一基准磁场针对相应的磁场传感器501的相应的空间区域502的实际值的偏差。第一基准磁场的实际值是针对多个空间区域502已知的第一基准磁场的值。
166.在确定了各个磁场传感器501的测量值与第一基准磁场针对相应的空间区域502的实际值的偏差之后,在第一校正步骤133中对通过磁场传感器501测定的测量值执行校正。所述校正可以例如包括减去偏移或者将所获取的测量值与相应的校正系数相乘。
167.第一校正步骤133中的校正可以通过一个相应地经过训练的神经网络或通过多个相应地经过训练的神经网络来执行。
168.第一基准磁场可包括不同的磁场强度和磁场方向。因此,针对每个磁场传感器501,可以确定所获取的测量值与第一基准磁场的实际值之间的明确的关系。确定的关系可以被组合在用于每个磁场传感器501的相应数据组中。相应的数据组例如可以存储在平面驱动系统200的控制单元201中。替代地,数据组可以存储在定子模块300的控制模块中。
169.传感器校准步骤125还包括温度确定步骤135,在该温度确定步骤中,确定定子模块300的多个温度。通过确定定子模块300的温度,能够实现对于传感器模块500的各个磁场传感器501的温度的确定。
170.随后,在第二基准磁场生成步骤137中生成第二基准磁场。第二基准磁场可以类似于第一基准磁场是转子400的转子磁场。替代地,第二基准磁场可以是定子模块300的定子磁场。替代地,第二基准磁场可以是外部的磁场布置方式的磁场。
171.在第二基准磁场生成步骤137中生成第二基准磁场之后,在第二基准磁场确定步骤139中,通过多个磁场传感器501的多次测量来确定第二基准磁场的多个测量值。类似于第一基准磁场确定步骤129,在此可以执行任意的数量的磁场传感器501的任意次的测量,以便针对磁场传感器501的相应的空间区域502来确定第二基准磁场的相应值。在此,针对定子模块300的多个不同的温度执行对磁场传感器501的相应的空间区域502的第二基准磁场的各个测量,从而针对各个磁场传感器501为定子模块300的不同温度来获取第二基准磁场的不同的测量值。
172.在通过不同的磁场传感器501针对定子模块300的不同温度获取多个测量值之后,在相关性确定步骤141中,针对每个磁场传感器501确定在第二基准磁场的相应的磁场传感器501的测量值和第二基准磁场针对相应的磁场传感器501的相应的空间区域502的实际值之间的温度相关性。因此,基于温度相关性,能够确定由磁场传感器501获取的测量值与所施加的第二基准磁场针对相应的磁场传感器501的相应的空间区域502的实际值的由温度
引起的偏差。
173.随后,在第二校正步骤143中,基于各个磁场传感器501的所确定的温度相关性校正相应的磁场传感器501的测量值。该校正在此能够包括总磁场的测量值、转子磁场的测量值和/或各个磁场传感器501的定子磁场的测量值。
174.在相关性确定步骤141中确定的温度相关性可以通过相应的数学模型表达,所述数学模型包括针对单个磁场传感器501的测量值与实际施加的磁场的偏差的温度范围中的不同温度的连续的温度相关性。可以基于温度相关性的模型描述来执行第二校正步骤143中的校正。温度相关性可以被组合在用于单个磁场传感器501的相应的数据组中。相应的数据组例如可以存储在控制单元201中或定子模块300的控制模块中或外部的数据处理单元或数据存储单元中。
175.在温度确定步骤135中的不同的温度例如可以通过加热或冷却定子模块300来实现。定子模块300的加热可经由定子导体309的热损失或通过外部热源来进行,其中前者在平面驱动系统的运行期间是可行的。通过第二校正步骤143可以实现对磁场传感器501的测量值的由温度引起的影响的补偿。由此又可以实现提高各个磁场传感器501的测量精确度。这又有助于改进转子400的位置确定的精确度,并且与之相关联地有助于改进对于转子400的控制。
176.替代地,第一基准磁场和第二基准磁场可以是相同的磁场。
177.通过执行传感器校准步骤125可以校正传感器内部的误差以及磁场传感器501在定子模块300的传感器模块500中的错误定位。此外,可以补偿各个磁场传感器501中的由温度引起的不准确性。由此可以引起磁场传感器501的提高的精确度和测量精确度。
178.图7示出了根据另一种实施方式的用于控制平面驱动系统200的方法100的另一流程图。
179.图7的实施方式对应于图5和图6中的实施方式的组合。
180.通过在校准步骤113中校准定子导体309并且通过在传感器校准步骤125中校准磁场传感器501,可以实现在补偿步骤107中对定子磁场对各个磁场传感器501的总磁场的测量值的贡献的改进的补偿。通过由于磁场传感器501的提高的测量精确度而改进的补偿和通过定子模块300的定子导体309产生的定子磁场的改进的认识,能够实现对转子400相对于定子模块300的位置的更好的位置确定并且与之相关联地实现对转子400的改进的控制。
181.附图标记列表
182.100 用于控制平面驱动系统的方法
183.101 第一定子磁场确定步骤
184.103 定子磁场生成步骤
185.105 总磁场确定步骤
186.107 补偿步骤
187.109 位置确定步骤
188.111 模型确定步骤
189.113 校准步骤
190.115 目标定子磁场确定步骤
191.117 生成步骤
192.119 第二定子磁场确定步骤
193.121 对应步骤
194.123 励磁电流确定步骤
195.125 传感器校准步骤
196.127 第一基准磁场生成步骤
197.129 第一基准磁场确定步骤
198.131 偏差确定步骤
199.133 第一校正步骤
200.135 温度确定步骤
201.137 第二基准磁场生成步骤
202.139 第二基准磁场确定步骤
203.141 相关性确定步骤
204.143 第二校正步骤
205.200 平面驱动系统
206.201 控制单元
207.203 数据连接
208.300 定子模块
209.301 载体
210.303 定子表面
211.305 定子模块壳体
212.307 定子单元
213.309 定子导体
214.311 定子导体间隙
215.313 剖切平面
216.315 连接线路
217.332 定子模块下侧
218.400 转子
219.401磁体组件
220.403 自由面
221.405 固定结构
222.407 第一转子方向
223.409 第二转子方向
224.411 第一磁体单元
225.413 第二磁体单元
226.415 第三磁体单元
227.417 第四磁体单元
228.500 传感器模块
229.501 磁场传感器
230.502 空间区域
231.503 第一周期性栅格
232.505 第二周期性栅格
233.507 第一方向
234.509 第二方向
235.511 第一磁场传感器
236.513 第二磁场传感器
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。