基于激光雷达和uwb室内定位的汽车测试模拟教学系统
技术领域
1.本发明属于汽车测试模拟技术领域,尤其涉及一种基于激光雷达和uwb室内定位的汽车测试模拟教学系统。
背景技术:
2.为车辆工程学科进行实训教学实践中,车辆道路测试教学涉及汽车滑行实验、制动实验、加速实验、稳态回转实验等环节,是车辆工程相关专业必修实践课程。在教学实践中,由实训教师带领学生,通过实地驾车演练,实现对车辆各参数的测试和教学。目前教学过程主要采用基于英国racelogic公司研发的vbox数据采集设备配套其上位机软件(test suite),同时为了实现对汽车数据的准备采集和实时教学,需要将vbox数据采集设备放置汽车副教师位,实训教师需要一边驾车一边通过笔记本完成对学生的教学任务。vbox数据采集设备配套其上位机软件(test suite)实现实验过程中实时参数的可视化,同时在演示教学后可以通过调用离线数据的方式来更好地展现实验细节。通过以上实验学生可以直观了解汽车性能参数及测试过程,掌握实验设备和软件的使用方式,对于培养实践能力和职业技能具有很好的现实意义。
3.在教学实践中,演示过程需要进行实际的道路测试,目前采用授课者驾驶车辆,学生坐在车内观摩的方式,车内座位数量限制单次参与学生在3人以内,授课者需要多次带领学生重复实验,学生可以观摩实验但是没有实际操作,一定程度上降低了参与度,增加了结课考核的难度;为了更好地展现车辆性能,提高参数代表性,演示过程需要采取较为激烈的驾驶方式,一方面引起车内人员身体不适,另一方面校内缺乏专用封闭的测试场地,存在产生交通意外的安全隐患;授课者在操作车辆的同时要对电脑上显示的实时参数进行讲解,具有一定的危险性,实验可重复性降低;本实验受天气影响较大,恶劣天气会影响教学进度,实验操作车辆的引入产生电能费用、保养费用和汽车磨损等额外成本,因此亟需一种能够降低训练成本的改进现有的实车道路测试演示教学模式。
技术实现要素:
4.本发明的目的在于:为了解决校内缺乏专用封闭的测试场地,存在产生交通意外的安全隐患;授课者在操作车辆的同时要对电脑上显示的实时参数进行讲解,具有一定的危险性,实验可重复性降低;本实验受天气影响较大,恶劣天气会影响教学进度,实验操作车辆的引入产生电能费用、保养费用和汽车磨损等额外成本的问题,而提出的一种基于激光雷达和uwb室内定位的汽车测试模拟教学系统。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种基于激光雷达和uwb室内定位的汽车测试模拟教学系统,包括控制中心模块,所述控制中心模块输出端与上位机模块输入端电性连接,所述控制中心模块用于对接场地和模拟车辆模块、定位模块、动作姿态采集模块、操作者和观摩者,所述上位机模块用于软件配置、数据演示和离线数据调取,所述控制中心输入端与操作者模块输出端电性连接,所
述操作者模块输出端与模拟车辆模块输入端通讯连接,所述操作者模块用于向控制中心输入控制信号,所述模拟车辆模块运行于测试场地内,所述模拟车辆模块安装有定位模块和运动姿态采集模块,所述定位模块用于采集模拟车辆模块的位置信息用以计算车速并绘制模拟车辆模块的运动轨迹,所述运动姿态采集模块用于采集模拟车辆模块运动时在六个自由度上的加速与转向情况。
7.作为上述技术方案的进一步描述:
8.所述测试场地为3m*3m的平面区域,且测试场地四周设有限制模拟车辆模块运动的挡板。
9.作为上述技术方案的进一步描述:
10.所述模拟车辆模块为可人工操作的模拟车辆模块,所述模拟车辆模块的车身长度在30cm,具备前后轮悬挂,在模拟车辆模块行进方向安装摄像头,且操作者通过操作手柄或操作界面控制汽车模型的加速、制动、左右转弯和倒车,观摩者可以以第三人称看到模拟车辆模块在场地内的运动情况并以第一人称看到驾驶视角。
11.作为上述技术方案的进一步描述:
12.所述定位模块采用基于激光雷达和超宽带无线通信技术相结合的方式进行室内小尺度精确定位,所述精确定位方法包括:通过在模拟车辆模块顶端放置激光雷达进行实时扫描得到各个角度上距离场地边缘的距离信息,通过与事先建立的场地数学模型进行匹配计算,得到此时模拟车辆模块在场地中的相对坐标,同时在模拟车辆模块上放置定位标签,在场地四角放置定位基站,实验时实时计算定位标签与四角定位基站的距离,通过计算得到模拟车辆模块的相对位置坐标,当激光雷达在某方向未产生边缘反射信号导致引起较大的距离奇异值时,系统选择uwb定位数据作为汽车位置信息。
13.作为上述技术方案的进一步描述:
14.所述控制中心还包括对运动姿态采集模块采集传回数据的计算,得到道路实验关切的横摆角速度、横摆加速度、横摇角速率的参数。
15.作为上述技术方案的进一步描述:
16.所述上位机模块输出端还连接有从机模块,且从机模块用于根据主机数据进行观摩查看。
17.作为上述技术方案的进一步描述:
18.所述控制中心连接有开放图传接口,接收模拟车辆模块回传的驾驶位实时图像,并将图像实时分发至学生的观摩计算机,所述控制中心连接有开放定位信息数据接口,接收激光雷达和upw回传数据,建模、计算、滤波后得到车辆相对精确的位置信息,并按照比例换算成gps仿真数据。
19.作为上述技术方案的进一步描述:
20.所述控制中心还包括向操作者模块展示的用户界面,用来实现对于整个系统的初始设置、参数的设置和系统运行状态查看的功能。
21.综上所述,由于采用了上述技术方案,本发明的有益效果是:
22.1、本发明中,实现了真实车辆测试教学过程的全模拟。同学们通过本发明中的车辆道路测试教学模拟教具可以多次观摩实验,通过本教具更好地展现车辆性能,提高参数代表性,同时避免了学生长时间采用激烈的方式进行实验,提高了教学过程的安全性,并且
改进现有的实车道路测试演示教学模式,在保证演示效果的基础上,提高实验的安全性、便捷性、可重复性、可操作性和学生的参与度,降低实验成本,进而更好地服务实践教学。
23.2、本发明中,通过在模拟训练时,对模拟车辆模块进行激光雷达定位配合超宽带无线通信技术(uwb)定位方式进行辅助定位,在车辆上放置定位标签,在场地四角放置定位基站,实验时实时计算定位标签与四角定位基站的距离,通过计算得到车辆的相对位置坐标,当激光雷达在某方向未产生边缘反射信号导致引起较大的距离奇异值时,系统选择uwb定位数据作为汽车位置信息,两种定位方式结合既保证了定位精度,又覆盖住了极端情况。
24.3、本发明中,通过设计的运动姿态采集模块,固定高精度高采样率陀螺仪加速度计,用以采集模型车辆运动时在六个自由度上的加速与转向情况,采用1000hz的高分辨率,实现精确的动作捕捉与滤波去干扰,采用主从演示观摩方式,即将教师的1台主机和学生的8台从机建立在一个局域工作组内,在演示时,教师可以将屏幕共享至8台从机上,学生在分组电脑上即可观看实时操作,动手实践环节,学生可以到主机上操作,其操作也可以被其他小组同时观摩学习。
附图说明
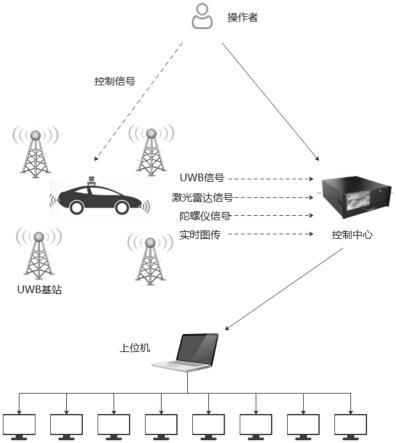
25.图1为本发明提出的一种基于激光雷达和uwb室内定位的汽车测试模拟系统原理图。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
27.请参阅图1,本发明提供一种技术方案:一种基于激光雷达和uwb室内定位的汽车测试模拟教学系统,包括控制中心模块,控制中心模块输出端与上位机模块输入端电性连接,其中,控制中心是整个方案的核心模块,对接场地和模拟车辆模块、定位模块、动作姿态采集模块、操作者和观摩者,需要具备实时数据采集、大规模数据计算与建模、友好的用户操作界面、大容量数据存储、接口简单等功能与特点,具体完成以下工作:
28.控制中心开放图传接口,接收模拟车辆模块回传的驾驶位实时图像,并将图像实时分发至学生的观摩计算机。
29.开放定位信息数据接口,接收激光雷达和upw回传数据,建模、计算、滤波后得到车辆相对精确的位置信息,并按照比例换算成gps仿真数据。
30.对接车载运动姿态采集模块,将陀螺仪加速度回传原始数据进行计算,得到道路实验关切的横摆角速度(yaw rate)、横摆加速度(y accel)、横摇角速率(roll rate)等运动姿态相关参数。
31.向操作者开放友好的用户界面,用来实现对于整个系统的初始设置(可载入默认设置),参数的设置,系统运行状态的查看等功能。同时兼顾发展性,为未来新增功能留出软硬件扩展空间;
32.控制中心模块用于对接场地和模拟车辆模块、定位模块、动作姿态采集模块、操作
者和观摩者,上位机模块用于软件配置、数据演示和离线数据调取,控制中心输入端与操作者模块输出端电性连接,操作者模块输出端与模拟车辆模块输入端通讯连接,操作者模块用于向控制中心输入控制信号,模拟车辆模块运行于测试场地内,模拟车辆模块安装有定位模块和运动姿态采集模块,定位模块用于采集车辆位置信息用以计算车速并绘制车辆运动轨迹,运动姿态采集模块用于采集模拟车辆模块运动时在六个自由度上的加速与转向情况,测试场地为3m*3m的平面区域,且测试场地四周设有限制汽车运动的挡板,其中,室内场地为3m*3m的平面区域,考虑到进行稳态回转实验,转弯半径不确定,故不预先设定赛道,车辆可在此平面区域任意位置运动。实验区域四周有挡板,限制汽车运动,同时为车辆的定位提供边界条件。
33.模拟车辆拟采用可人工操作的模拟车辆模块,所述模拟车辆模块的车身长度在30cm左右,具备前后轮悬挂,在车辆行进方向安装摄像头,采用实时图传技术,将汽车行进视角看到的画面传回控制中心,达到模拟驾驶的目的。实验时,操作者通过操作手柄或操作界面控制汽车模型的加速、制动、左右转弯、倒车,观摩者可以以第三人称看到车辆在场地内的运动情况并以第一人称看到驾驶视角。
34.通过上述方式,摆脱了车辆与场地限制,在授课者讲解演示过后,学生可以上手实操,体验控制车辆和配置使用软件,建立更为直观的授课体验;
35.模拟车辆模块为可人工操作的模拟车辆模块,所述模拟车辆模块的车身长度在30cm,具备前后轮悬挂,在车辆行进方向安装摄像头,且操作者通过操作手柄或操作界面控制汽车模型的加速、制动、左右转弯、倒车,观摩者可以以第三人称看到车辆在场地内的运动情况并以第一人称看到驾驶视角;
36.定位模块采用基于激光雷达和超宽带无线通信技术(uwb)相结合的方式进行室内小尺度精确定位,精确定位方法包括:通过在模拟车辆模块顶端放置激光雷达进行实时扫描得到各个角度上距离场地边缘的距离信息,通过与事先建立的场地数学模型进行匹配计算,得到此时模拟车辆模块在场地中的相对坐标,同时在车辆上放置定位标签,在场地四角放置定位基站,实验时实时计算定位标签与四角定位基站的距离,通过计算得到车辆的相对位置坐标,当激光雷达在某方向未产生边缘反射信号导致引起较大的距离奇异值时,系统选择uwb定位数据作为汽车位置信息;
37.控制中心还包括对运动姿态采集模块采集传回数据的计算,得到道路实验关切的横摆角速度、横摆加速度、横摇角速率的参数;
38.上位机模块输出端还连接有从机模块,且从机模块用于根据主机数据进行观摩查看,其中,演示者主要操作的是运行有上位机应用软件的计算机,在该计算机上完成软件配置,数据演示,离线数据调取等功能。实车道路测试时,该电脑需放置在副驾驶位上,无论操作者还是观摩者对该电脑的使用和查看均不方便,通过采用主从演示观摩方式,即将教师的1台主机和学生的8台从机建立在一个局域工作组内,在演示时,教师可以将屏幕共享至8台从机上,学生在分组电脑上即可观看实时操作。动手实践环节,学生可以到主机上操作,其操作也可以被其他小组同时观摩学习;
39.控制中心连接有开放图传接口,接收模拟车辆模块回传的驾驶位实时图像,并将图像实时分发至学生的观摩计算机,控制中心连接有开放定位信息数据接口,接收激光雷达和upw回传数据,建模、计算、滤波后得到车辆相对精确的位置信息,并按照比例换算成
gps仿真数据;
40.控制中心还包括向操作者模块展示的用户界面,用来实现对于整个系统的初始设置、参数的设置和系统运行状态查看的功能。
41.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。