1.本公开涉及信息处理系统、传感器系统、信息处理方法和程序。本公开具体涉及用于对关于到对象的距离的信息执行处理的信息处理系统、传感器系统、信息处理方法和程序。
背景技术:
2.专利文献1公开了一种人流分析系统。该人流分析系统包括成像终端和分析服务器。成像终端和分析服务器经由网络彼此连接。
3.成像终端包括距离图像生成单元、相对位置检测单元、绝对位置计算单元、人员信息生成单元以及传输单元。距离图像生成单元在预定成像区域内生成距离图像。相对位置检测单元检测在成像区域中存在的人员相对于成像终端的位置的相对位置。绝对位置计算单元基于由相对位置检测单元检测到的相对位置以及成像终端的绝对位置来计算人员的绝对位置。“绝对位置”是使用预定固定点的位置来定义的。人员信息生成单元生成人员信息,该人员信息包括一条关于由绝对位置计算单元计算的人员的绝对位置的信息以及一条关于人员在该绝对位置处存在的时间的信息。传输单元经由网络将由人员信息生成单元生成的人员信息传输到分析服务器。
4.分析服务器生成基于人员的信息组,该基于人员的信息组从多条接收到的人员信息收集被估计为关于同一人员的人员信息的人员信息。分析服务器在基于人员的信息的基础上来分析基于人员的移动信息。
5.引文列表
6.专利文献
7.专利文献1:jp 2017-224148a
技术实现要素:
8.诸如专利文献1的人流分析系统的信息处理系统可能被期望为减少生成与存在于目标空间中的对象有关的对象信息所花的处理时间。本公开是鉴于上述情况而实现的,并且本公开的目的是提供一种可有助于减少处理时间的信息处理系统、传感器系统、信息处理方法和程序。
9.本公开的一个方面的信息处理系统被配置为对由光学传感器生成的电信号指示的信息执行处理。光学传感器包括配置为接收反射光的光接收单元,该反射光是从发光单元朝向目标空间发射的、从目标空间内的距离可测量范围反射的测量光。光接收单元包括多个像素。电信号指示关于多个像素中已经接收到光的像素的信息。该信息处理系统包括对象信息生成器和输出单元。对象信息生成器被配置为生成对象信息。一条对象信息指示存在于目标距离区段中的对象的特征。目标距离区段是通过根据从发光单元发射测量光的时间点起经过的时间差划分距离可测量范围而定义的多个距离区段中选择的一个。电信号包括分别与多个距离区段相关联的多个距离区段信号。对象信息生成器被配置为基于多个
距离区段信号中与目标距离区段相关联的距离区段信号来生成该条对象信息。输出单元被配置为输出该对象信息。
10.本公开的一个方面的传感器系统包括信息处理系统和光学传感器。
11.一种信息处理方法,其用于对由光学传感器生成的电信号指示的信息执行处理。光学传感器包括配置为接收反射光的光接收单元,该反射光是从发光单元朝向目标空间发射的、从目标空间内的距离可测量范围反射的测量光。光接收单元包括多个像素。电信号指示关于多个像素中已经接收到反射光的像素的信息。该信息处理方法包括生成对象信息。一条对象信息指示存在于目标距离区段中的对象的特征。目标距离区段是通过根据从发光单元发射测量光的时间点起经过的时间差划分距离可测量范围而定义的多个距离区段中选择的一个。电信号包括分别与多个距离区段相关联的多个距离区段信号。生成对象信息的步骤包括基于多个距离区段信号中的与目标距离区段相关联的距离区段信号来生成该条对象信息。该信息处理方法包括输出该对象信息。
12.本公开的一个方面的程序是被配置为使一个或更多处理器执行信息处理方法的程序。
附图说明
13.图1是示出根据一个实施例的使用传感器系统测量到对象的距离的方法的示例性视图;
14.图2是根据该实施例的传感器系统的框图;
15.图3是根据该实施例的传感器系统的光学传感器的像素的示意图;
16.图4是根据该实施例的光学传感器的框图;
17.图5是根据该实施例的传感器系统的信息处理系统的框图;
18.图6是示出由根据该实施例的信息处理系统的对象信息生成器执行的处理的流程的流程图;
19.图7是用于示出由根据该实施例的对象信息生成器执行的处理的示例的视图;
20.图8是用于示出由根据该实施例的对象信息生成器执行的处理的示例的视图;
21.图9是用于示出由根据该实施例的对象信息生成器执行的处理的示例的视图;
22.图10是用于示出由根据该实施例的对象信息生成器执行的处理的示例的视图;
23.图11是用于示出由根据该实施例的对象信息生成器执行的处理的示例的视图;
24.图12用于示出由根据该实施例的对象信息生成器执行的处理的示例的视图;
25.图13是示出由根据该实施例的信息处理系统执行的处理的时机的时序图;以及
26.图14是根据一种变型的传感器系统中的信息处理系统的一部分的框图。
具体实施方式
27.现在将参考附图详细描述根据一个实施例的信息处理系统100、传感器系统200、信息处理方法和程序。注意,下面要描述的实施例仅是本公开的各种实施例中的一个示例性实施例,并且不应被解释为限制性的。相反,只要可实现本公开的优点,该实施例可以根据设计选择或任何其它因素以各种方式容易地修改。要在实施例的以下描述中参考的附图全都是示意性表示。也就是说,附图上示出的相应构成元件的尺寸(包括厚度)的比例并不
总是反映它们的实际尺寸比例。
28.(1)概述
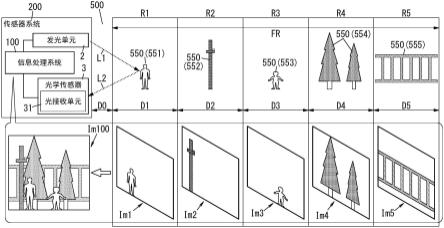
29.如图1所示,本实施例的信息处理系统100是对由光学传感器3生成的电信号si10指示的信息执行处理的系统。光学传感器3包括光接收单元31。光接收单元31被配置为接收光(反射光)l2,其是从发光单元2朝向目标空间500发射的、从目标空间500内的距离可测量范围反射的测量光l1。在图1中,从发光单元2发射的测量光l1和作为由对象550反射的测量光l1的光l2由虚线箭头示意性地示出。如图2所示,光接收单元31包括多个像素311。由光学传感器3生成的电信号si10指示关于多个像素311中已经接收到光l2的像素311的信息。
30.如图1所示,根据从发光单元2发射测量光l1的时间点起经过的时间差,距离可测量范围fr被划分为多个(例如,五个)距离区段r1至r5。具体地,从传感器系统200到目标空间500中的任意点的距离唯一地对应于光的往返时间。因此,通过以规则的时间间隔对从发光单元2发射测量光l1的时间点起经过的时间进行分类,有可能将距离可测量范围fr划分为多个距离区段r1至r5。
31.电信号si10包括分别与多个距离区段r1至r5相关联的多个距离区段信号si1至si5。
32.如图5所示,信息处理系统100包括对象信息生成器131和输出单元(信息输出单元)14。
33.对象信息生成器131被配置为生成几条对象信息a1至a5。各条对象信息a1至a5中的每一个是指示存在于目标距离区段中的对象550的特征的一条信息,该目标距离区段是从多个距离区段r1至r5中选择的一个。对象信息生成器131被配置为基于多个距离区段信号si1至si5中与目标距离区段相关联的距离区段信号生成每条对象信息。各条对象信息a1至a5中的每一个是元数据(即,提供关于其它数据的信息的数据,或包括关于其它数据的属性和/或与其它数据有关的信息的数据)。
34.输出单元14被配置为输出由信号处理器13生成的各条对象信息a1至a5。输出单元14例如被配置为将各条对象信息a1至a5输出到外部装置6。
35.根据本实施例的信息处理系统100,基于与目标距离区段相关联的距离区段信号,生成关于存在于该目标距离区段中的对象550的一条对象信息,该目标距离区段是多个距离区段r1至r5之一。例如,基于与距离区段r1相关联地生成的距离区段信号si1,生成关于存在于距离区段r1中的对象550的一条对象信息a1。与例如专利文献1中描述的成像终端使用距离图像(即,包含关于成像区域内的距离区段的整体的信息的图像)来生成信息的情况相比,这可减少要被处理的数据的数据大小。因此,可减少处理时间。
36.此外,根据本实施例的信息处理系统100,每当光学传感器3生成与目标距离区段(例如,距离区段r1)相关联的距离区段信号(例如,距离区段信号si1)时,有可能生成关于距离区段r1的一条对象信息(一条对象信息a1),而无需等待生成与其它距离区段(例如,距离区段r2、r3、
…
)相关联的距离区段信号(例如,si2、si3、
…
)。这使得能够半实时地生成和输出该条对象信息。
37.(2)细节
38.在下文中,将参考附图更详细地描述信息处理系统100和包括其的传感器系统200。
39.(2.1)通过传感器系统的距离测量的概要
40.首先描述的是参考图1对本实施例的传感器系统200如何测量距离的原理的概要。
41.传感器系统200被配置为基于飞行时间(tof)方法来测量到对象550的距离。如图1所示,传感器系统200使用作为从发光单元2发射并被对象550反射的测量光l1的光(反射光)l2来测量到对象550的距离。传感器系统200例如可被用于安装在车辆上以检测障碍物的存在的对象识别系统、检测对象(或人员)的监视摄像机或安全摄像机的目的或类似目的。
42.传感器系统200被配置为测量到目标空间500内的距离可测量范围fr中存在的对象550的距离。距离可测量范围fr可以是取决于从发光单元2发射测量光l1时起直到光学传感器3执行光接收单元31的最后曝光操作为止的时间(设定时间)的长度而确定的参数。距离可测量范围fr例如可具有数十厘米至数十米的范围内的长度,但并不特别限制于此。根据传感器系统200,距离可测量范围fr可以是固定的或者可以是可变地设定的。
43.具体地,传感器系统200被配置为确定关于通过划分距离可测量范围fr限定的多个(例如五个)距离区段r1至r5中的每一个是否存在任何对象550。传感器系统200被进一步配置为关于其中被确定为存在任何对象550的每个距离区段,生成指示对象550的特征(多个特征)的一条对象信息。多个距离区段r1至r5通过根据从发光单元2发射测量光l1的时间点起经过的时间差划分距离可测量范围fr来定义。换句话说,距离可测量范围fr由多个距离区段r1至r5构成。在该实施例中,多个距离区段r1至r5具有彼此相同的长度。尽管没有特别限制,但是多个距离区段r1至r5中的每一个可具有例如在几厘米至几米范围内的长度。可替代地,多个距离区段r1至r5可以不具有相同的长度。而且,距离区段的数量不受特别限制。距离区段的数量典型地可以从1到15的组中选择。
44.传感器系统200可以被配置为在从发光单元2发射测量光l1的时间起经过与到目标距离区段(测量目标)的最近点的距离的两倍对应的时间的时间点,例如,其中目标距离区段是从多个距离区段r1至r5中选择的一个,开始光学传感器3的像素311的曝光(开始曝光操作)。传感器系统200可以被进一步配置为在与到该距离区段的最远点的距离的两倍相对应的时间经过的时间点,完成光学传感器3的像素311的曝光(完成曝光操作)。当任何对象550存在于目标距离区段中时,以这种方式操作光学传感器3,光l2应该由光学传感器3的光接收单元31的多个像素311中与对象550存在的二维位置(在垂直于传感器系统200的光轴的平面中的位置)对应的区域的特定像素(多个像素)311接收。因此,有可能获得关于以下的信息:目标距离区段中是否存在任何对象550;以及对象550的二维位置。此外,通过根据在多个像素311中的每一个处是否存在任何对象550(该像素是否接收光l2)的结果而向该像素赋予值“1”或“0”,可以获得目标距离区段的二值图像(距离区段图像;见图8),其示出存在对象550的区域(二维位置)。
45.该实施例的传感器系统200被配置为关于每个距离区段测量执行多次光接收操作。多次光接收操作中的每一个包括测量光l1的发射和光学传感器3的像素311的曝光(曝光操作)。传感器系统200被进一步配置为,当某个像素311接收光l2的次数(光接收次数)超过阈值时,确定在与该像素311对应的位置处存在任何对象550(对象550的至少一部分)。这种多次光接收操作可有助于减少噪声的影响。
46.传感器系统200关于多个距离区段r1至r5中的每一个执行上述操作。作为结果,有
可能确定是否存在任何对象550,以获得关于每个距离区段的一条(多条)对象信息,并获得距离区段图像。
47.将参考图1的示例更详细地描述传感器系统200如何操作。在图1的示例中,多个距离区段r1至r5的每一个中存在至少一个对象550。具体地,在距离区段r1中,人员551作为对象550存在。在距离区段r2中,电线杆552作为对象550存在。在距离区段r3中,人员553作为对象550存在。在距离区段r4中,两棵树554作为对象550存在。在距离区段r5中,围栏555作为对象550存在。在下文中,为了便于解释,从传感器系统200到距离区段r1的最近点的距离将由“d0”表示。此外,距离区段r1至r5的长度将分别由“d1”至“d5”表示。因此,从传感器系统200到距离区段r1的最远点的距离由“d0 d1”表示。典型地,“d0”可以是0米。距离可测量范围fr的全长可由“d0 d1 d2 d3 d4 d5”表示。
48.例如,为了确定在距离区段r1中是否存在任何对象550,传感器系统200在从发光单元2发射测量光l1的时间起经过时间“2
×
d0/c”的时间点开始光学传感器3的曝光,并在经过时间“2
×
(d0 d1)/c”的时间点完成光学传感器3的曝光。在此,“c”表示光速。在距离区段r1中,如图1所示,作为对象550的人员551存在于与光学传感器3的多个像素311中的下方区域的像素311对应的位置。因此,对于与人员551的位置对应的区域的光学传感器3的像素311,光接收的次数(像素311接收光l2的次数)应超过阈值。另一方面,对于其余的像素311,光接收的次数不应超过阈值。作为结果,获得了关于距离区段r1的图1所示的距离区段图像im1。
49.类似地,为了确定在距离区段r2中是否存在任何对象550,传感器系统200在从发光单元2发射测量光l1的时间起经过时间“2
×
(d0 d1)/c”的时间点开始光学传感器3的曝光,并在经过时间“2
×
(d0 d1 d2)/c”的时间点完成光学传感器3的曝光。在距离区段r2中,如图1所示,作为对象550的电线杆552存在于与光学传感器3的多个像素311中水平轴线的一侧区域的像素311对应的位置。因此,作为与电线杆552的位置对应的区域的光学传感器3的像素311,光接的收次数(像素311接收光的次数l2)应超过阈值。另一方面,作为其余像素311,光接收的次数不应超过阈值。作为结果,获得了关于距离区段r2的图1所示的距离区段图像im2。图1所示的距离区段图像im3至im5也以类似的方式关于相应的距离区段r3至r5获得。
50.应注意,作为存在于距离区段r4中的对象550的树554的一部分,其位于作为存在于距离区段r3中的对象550的人员553的后面并且因此被人员553隐藏。然而,在图1中,为了便于理解,在距离区段图像im4中将树554示为其实际形状。这同样适用于其它距离区段图像。
51.传感器系统200被进一步配置为组合关于多个距离区段r1至r5获得的多个距离区段图像im1至im5,以生成关于距离可测量范围fr的距离图像im100。具体地,传感器系统200向与对象550对应的区域的像素311的多个距离区段图像im1至im5赋予不同的颜色(或权重),并将多个距离区段图像im1至im5彼此相加。作为结果,例如获得了图1所示的距离图像im100。
52.本实施例的传感器系统200可根据上述方式生成距离区段图像im1至im5以及距离图像im100。
53.可替代地,传感器系统200可以被配置为不生成距离区段图像im1至im5,而是生成
从其可导出距离区段图像im1至im5的信息(信号)。这同样适用于距离图像im100。
54.(2.2)传感器系统的配置
55.接下来,参考图2至图4描述传感器系统200的配置。
56.如图2所示,传感器系统200包括信息处理系统100、发光单元2和光学传感器3。光学传感器3包括光接收单元31、光接收控制器32和输出单元33。
57.发光单元2包括被配置为向对象550发射测量光l1的光源21。测量光l1可以是脉冲光。用于基于tof方法的距离测量的测量光l1可以是单波长的光,具有相对短的脉冲宽度,并具有相对高的峰值强度。如果传感器系统200(光学传感器3)旨在用于城镇区域,则测量光l1可具有近红外波长带内的波长,因为具有这种波长的光对于人眼是相对低的发光度,并且还不太可能受诸如太阳光的环境光的影响。在本实施例中,光源21可以包括激光二极管,并且例如发射脉冲激光。发射脉冲激光的光源21满足激光产品安全标准(jis c 6802)规定的1类激光产品或2类激光产品的要求。然而,光源21不限于上述配置,而是可以包括发光二极管(led)、竖直腔表面发射激光器(vcsel)、卤素灯或类似物。此外,测量光l1可具有在近红外波长带以外的波长带内的波长。
58.光接收单元31包括像素单元310。像素单元310包括多个像素311。
59.在像素单元310中,多个像素311以二维阵列排列,具体地以矩阵图案排列,如图2所示,像素单元310构成图像传感器。每个像素311被配置为仅在曝光持续时间期间接收光。光学传感器3被配置为将由像素单元310生成的电信号输出到信息处理系统100。
60.图3示出像素单元310的每一像素311的电路图。如图3所示,像素311包括光电转换元件d10、电荷累积元件c10、浮动扩散部fd1、放大晶体管sa1、传输晶体管st1、st2、st3以及复位晶体管sr1。
61.当在内部电源v
dd
(偏压)被施加到光电转换元件d10的同时接收作为从发光单元2发射并被对象550反射的测量光l1的光l2时,光电转换元件d10生成电荷。光电转换元件d10响应于单光子生成饱和电荷量的电荷。也就是说,光电转换元件d10响应于单光子的接收生成固定量(即,饱和电荷量)的电荷。在本实施例中,光电转换元件d10包括雪崩光电二极管(apd)。
62.电荷累积元件c10在其上累积由光电转换元件d10生成的电荷的至少一部分。电荷累积元件c10包括电容器。电荷累积元件c10具有能够存储光电转换元件d10多次生成的这种电荷量的电容。因此,电荷累积元件c10可将光电转换元件d10生成的电荷合计,这有助于提高像素单元310的电信号的s/n比,并提高测量精度。在本实施例中,电荷累积元件c10的第一端接地。
63.浮动扩散部fd1定位在光电转换元件d10与电荷累积元件c10之间。在浮动扩散部fd1上,可以累积电荷。
64.放大晶体管sa1具有连接到浮动扩散部fd1的栅电极。因此,晶体管sa1的漏极-源极电阻取决于累积在浮动扩散部fd1上的电荷量而改变。晶体管sa1的源极连接至内部电源v
dd
。晶体管sa1将具有与光电转换元件d10生成的电荷量对应的值(相当于与电荷累积元件c10上累积的电荷量对应的值)的电信号(像素信号)输出至输出线312。
65.晶体管st1被连接在光电转换元件d10的阴极与浮动扩散部fd1之间。晶体管st2被连接在浮动扩散部fd1与电荷累积元件c10的第二端之间。晶体管st3被连接在输出线312与
晶体管sa1的漏电极之间。晶体管st3与输出线312之间的节点经由用作包括晶体管sa1的源极跟随器的恒定电流负载的晶体管接地。晶体管sr1被连接在浮动扩散部fd1与内部电源v
dd
之间。
66.每个像素311被配置为曝光预定的曝光持续时间(执行曝光操作)以生成电荷,该电荷的量反映像素311在曝光持续时间期间是否接收到光子的结果。
67.具体地,在像素311的曝光操作中,晶体管st1、sr1首先被接通,并且由此在光电转换元件d10和浮动扩散部fd1上累积的相应电荷被复位。然后,晶体管st1、sr1被关断,以开始像素311的曝光(曝光操作)。如果光电转换元件d10在曝光持续时间期间接收光子,则光电转换元件d10生成(饱和电荷量的)电荷。当晶体管st1被接通以结束曝光持续时间时,由光电转换元件d10生成的电荷被传输到浮动扩散部fd1。当晶体管st1被关断并且然后晶体管st2被接通时,传输到浮动扩散部fd1的电荷进一步被传输到电荷累积元件c10并累积在其上。在电荷被传输到电荷累积元件c10之后,晶体管sr1被接通以复位累积在浮动扩散部fd1上的电荷。在浮动扩散部fd1上累积的电荷复位之后,晶体管sr1再次被关断。
68.简而言之,根据像素311的曝光操作,如果光电转换元件d10在曝光持续时间期间没有接收到光子,则没有电荷累积在电荷累积元件c10上。同时,如果光电转换元件d10在曝光持续时间内接收到任何光子,则饱和电荷量的电荷累积在电荷累积元件c10上。
69.如在上述“(2.1)通过传感器系统的距离测量的概要”一节中描述的,传感器系统200被配置为关于每个距离区段执行多次光接收操作,其中多次光接收操作中的每一个包括测量光l1的发射和光学传感器3的像素311的曝光操作。从而,在多次光接收操作之后,每个像素311的电荷累积元件c10在其上累积与光电转换元件d10在多次光接收操作中接收光子(即,光l2)的次数相对应的量的电荷。光接收操作执行的次数(光接收次数)不受特别限制,但是可以是例如20次。
70.在多次光接收操作(光接收次数)之后,晶体管st2被接通,并且由此在电荷累积元件c10上累积的电荷被传输到浮动扩散部fd1。作为结果,晶体管sa1的栅电极被施加电压,该电压的电压值反映在浮动扩散部fd1上累积的电荷量(即,反映光电转换元件d10已接收的光子数)。接着,晶体管st3被接通,并且由此信号被输出到输出线312,该信号的值反映光电转换元件d10已经接收的光子数(即,反映在电荷累积元件c10上累积的电荷量)。此后,晶体管sr1、st1、st2被接通,并且由此保留在光电转换元件d10、浮动扩散部fd1和电荷累积元件c10上的不必要的电荷被放电。
71.简而言之,光学传感器3被配置为基于一次或更多次、更具体地多次光接收操作的结果来确定多个像素311中的每一个是否接收到光l2。每个光接收操作包括测量光l1从发光单元2的发射和像素311的曝光操作。
72.如图4所示,光接收控制器32包括竖直驱动器电路321、列电路322、列模数转换(adc)电路323和移位寄存器电路324。输出单元33包括输出接口331。
73.竖直驱动器电路321被配置为经由控制线向每个像素311提供控制信号(第一控制信号),以从像素311读出信号。存在多个控制线。第一控制信号可包括多个控制信号以分别接通像素311的晶体管st1、st2、st3、sr1。多个像素311以矩阵图案排列,并且例如相对于矩阵图案的每一行提供控制线。因此,排列在同一行中的两个或更多像素311同时接收控制信号。
74.从像素311读出的信号经由输出线312(见图3)被提供给列电路322。相对于多个像素311的矩阵图案的每一列设置输出线312。
75.列电路322对从像素311读取的信号执行信号处理,例如放大处理、加法处理及类似处理。列电路322例如可以包括列放大电路以执行放大处理的、诸如相关双采样(cds)电路的噪声降低电路以降低信号中包含的噪声分量。
76.列ad转换电路323被配置为对由列电路322处理的信号(模拟信号)执行ad转换,并且保持如此转换的信号(即,数字信号)。
77.移位寄存器电路324被配置为向列ad转换电路323提供控制信号(第二控制信号),以使列ad转换电路323按列顺序地将已被ad转换并保持在其上的信号传输到输出单元33。
78.输出单元33的输出接口331包括例如低电压差分信号(lvdc)电路。由光接收单元31(即,由像素311)生成的信号通过输出单元33被输出到外部(在该实施例中,输出到信息处理系统100)。通过输出单元33输出的像素单元310(多个像素311)的信号对应于距离区段信号si1至si5,其是分别与距离区段r1至r5相关联的电信号。距离区段信号si1至si5可以具有二值信号的形式,其中,“1(高电平)”指示像素311的“光接收次数”超过阈值(该像素311对应于存在任何对象550的区域),而“0(低电平)”指示像素311的“光接收次数”不超过阈值(该像素311对应于不存在对象550的区域)。
79.(2.3)信息处理系统
80.如图2所示,信息处理系统100包括测量控制器11、信号接收单元12、信号处理器13、输出单元14以及呈现单元15。测量控制器11和信号处理器13可以被实现为包括一个或更多处理器(微处理器)以及一个或更多内存的计算机系统。该计算机系统通过一个或更多处理器执行存储在一个或更多内存中的一个或更多程序(应用)来执行测量控制器11和信号处理器13的功能。在该实施例中,程序被预先存储在内存中。可替代地,程序可以经由诸如因特网的电信线路下载,或者在已经存储在诸如内存卡的存储介质中之后被分发。
81.测量控制器11被配置为控制发光单元2和光学传感器3。
82.测量控制器11控制发光单元2的操作,例如光源21发射测量光l1的时机(即,光发射的时机)、从光源21发射的测量光l1的脉冲宽度,及类似操作。
83.测量控制器11通过光接收控制器32控制晶体管st1至st3、sr1的操作时机,以控制光学传感器3的操作,例如关于每个像素311的像素311(光电转换元件d10)被曝光的时机(曝光时机)、曝光持续时间、电信号的读出时机及类似操作。例如,曝光时机对应于像素311的晶体管st1、sr1从接通切换到关断的时间点。完成曝光持续时间的时机对应于像素311的晶体管st1从关断切换到接通的时间点。读出时机对应于像素311的晶体管st3从关断切换到接通时的时间点。
84.测量控制器11可以包括计时器111,并且例如基于由计时器111测量的时间来控制发光单元2的发光的时机和光学传感器3的各种操作时机。
85.测量控制部11被配置为,关于构成距离可测量范围fr的多个距离区段r1至r5依次执行距离测量。具体地,测量控制器11首先通过执行发光单元2的发光和光学传感器3的曝光,生成与最接近传感器系统200的距离区段即距离区段r1相关联的距离区段信号si1。接着,测量控制器11通过执行发光单元2的发光和光学传感器3的曝光,生成与距离传感器系统200次近的距离区段即距离区段r2相关联的距离区段信号si2。测量控制器11还依次生成
分别与距离区段r3至r5相关联的距离区段信号si3至si5。测量控制器11多次重复地执行距离区段r1至r5的距离测量集合(即,生成距离区段信号si1至si5)。
86.信号接收单元12被配置为接收从光学传感器3的输出单元33输出的电信号si10。电信号si10包括距离区段信号si1至si5中的任一个。由信号接收单元12接收的电信号si10被信号处理器13处理。
87.如图5所示,信号处理器13包括对象信息生成器131、区段间信息生成器132和距离图像生成器133。
88.对象信息生成器131被配置为,基于由光学传感器3生成的关于多个距离区段r1至r5的电信号中与目标距离区段相关联的距离区段信号,生成指示存在于多个距离区段r1至r5中的对应一个距离区段中的对象的特征(多个特征)的对象信息。
89.对象信息生成器131包括生成器(第一生成器1311至第五生成器1315),其数量对应于距离区段的数量(即,五个)。第一生成器1311从信号接收单元12接收距离区段信号si1。第一生成器1311基于作为与距离区段r1相关联的电信号的距离区段信号si1,生成关于存在于距离区段r1中的对象550(图1的示例中的人员551)的一条对象信息a1。类似地,第二生成器1312基于作为与距离区段r2相关联的电信号的距离区段信号si2,生成关于存在于距离区段r2中的对象550(图1的示例中的电线杆552)的一条对象信息a2。第三生成器1313基于作为与距离区段r3相关联的电信号的距离区段信号si3,生成关于存在于距离区段r3中的对象550(图1的示例中的人员553)的一条对象信息a3。第四生成器1314基于作为与距离区段r4相关联的电信号的距离区段信号si4,生成关于存在于距离区段r4中的对象550(图1的示例中的树554)的一条对象信息a4。第五生成器1315基于作为与距离区段r5相关联的电信号的距离区段信号si5生成关于存在于距离区段r5中的对象550(图1的示例中的围栏555)的一条对象信息a5。
90.根据上述说明和图5,多个距离区段信号si1至si5通过相互不同的路径被传输到(信号处理器13的)对象信息生成器131,并且由对象信息生成器131的相互不同的元件(具体地,第一生成器1311至第五生成器1315)处理。然而,这仅仅是解释的目的,并且本公开不限于此。可替代地,多个距离区段信号si1至si5可通过相同的路径传输到对象信息生成器131,并可由相同的元件处理。
91.接下来参考图6至图11描述对象信息生成器131(例如,第一生成器1311至第五生成器1315)如何生成对象信息a1至a5的方法。图6是示出由对象信息生成器131执行的处理的流程图。下面将解释关于距离区段r1的操作,但是关于其它距离区段r2至r5的操作同样适用。以下,如需要,参考图7所示的示例目标空间500的测量结果进行说明。在图7所示的示例目标空间500中,两个对象550(具体地,车辆)存在于距离区段r1中。
92.对象信息生成器131(例如,第一生成器1311)通过信号接收单元12接收与多个距离区段r1至r5中的距离区段r1相关联的距离区段信号si1(s1)。
93.当接收到距离区段信号si1时,对象信息生成器131对距离区段信号si1执行预处理(s2)。预处理的示例包括世界坐标的设定处理,背景信号的去除处理,以及如果像素311的光电转换元件d10包括apd则有apd特有的暗电流的去除处理。
94.世界坐标的设定处理可以包括坐标转换处理,该坐标转换处理将基于传感器系统200(光学传感器3)定义的设备坐标转换为世界坐标,该世界坐标是在与目标空间500对应
的虚拟空间内定义的正交坐标系。根据正交坐标系的世界坐标,即使对象550的位置改变,虚拟空间内由对象550占据的区域的大小也是恒定的。因此,在对象550的尺寸被用作特征之一的情况下,即使当对象的位置改变时,到世界坐标的转换也可以消除对要与该特征进行比较的基准的改变的需要。因此,这可以使得容易地评估特征。
95.预处理提供指示例如图8所示的距离区段图像im10(二值图像)的数据。图8示出二值图像,其中,将白色(值“1”)赋予与存在任何对象550的区域相对应的像素311,并且将黑色(值“0”)赋予与不存在对象550的区域相对应的像素311。图9示出与图8相对应的数据(二值数据)的图像,其中,将值“1”赋予与存在任何对象550的区域相对应的像素311,并且将值“0”赋予与不存在对象550的区域相对应的像素311。为了简化起见,在图9中,没有示出所有值的像素311,即,示出了一些像素311,而省略了其余的像素311。
96.在预处理(s2)之后,对象信息生成器131对由距离区段信号si1指示的距离区段图像im10执行游程编码(rlc)处理(s3),以生成游程数据(rl数据)。这提供例如图10所示的rl数据。图10所示的rl数据的行分别对应于图9所示的二值数据的行。图10所示的rl数据的每一行仅包括值“1”连续出现的区域的第一列编号和最后列编号。应注意,rl数据可解码为原始二值数据。与rlc预处理数据相比,执行rlc处理可以显著地减小数据大小。
97.在rlc处理(s3)之后,对象信息生成器131根据连通性分析rl数据,以确定是否存在任何对象550(s4)。具体地,对象信息生成器131分析rl数据,以确定值“1”连续出现在每一行中的各行的区域在竖直相邻行中是否连续。此外,对象信息生成器131将赋予值“1”并且彼此相邻的像素的集合指定为一个“块”。当发现构成一个“块”的像素311的数量大于或等于阈值时,对象信息生成器131确定对象550存在于与“块”对应的像素311的区域处。对象信息生成器131基于对象550将不同的标签(标签数据)赋予确定的对象550。具体地,在图8所示的示例中,左对象550的区域被赋予标签“obj1”,并且右对象550的区域被赋予标签“obj2”。当发现不存在被赋予值“1”的像素311,或者构成一个“块”的像素311的数量小于阈值时,对象信息生成器131确定在目标距离区段中不存在对象550。
98.简而言之,对象信息生成器131被配置为基于与目标距离区段r1相关联的距离区段信号si1生成由多个像素311的像素值表示的距离区段图像im10。像素值分别指示多个像素311是否已经接收到光l2。对象信息生成器131被进一步配置为从构成距离区段图像im10的多个像素311提取已经接收光l2并且彼此连续相邻的像素311的区域,并且然后确定该区域对应于一个对象550。对象信息生成器131被进一步配置为在发现距离区段图像im10内存在多个区域、其中每个区域被确定为与一个对象550对应的情况下,向多个对象550赋予不同的标签(obj1,obj2)。
99.在确定对象550是否存在(s4)之后,对象信息生成器131提取关于每个对象550的特征(s5)。在该实施例中,对象信息生成器131提取关于每个对象550的多个特征。对象信息生成器131基于被确定为对应于一个对象550的连续像素311的区域来提取该对象550的特征。特征的示例包括对象550(即,被确定为与对象550相对应的连续像素311)的面积、长度(边界长度)、列方向上的第一矩、行方向上的第一矩、第二矩、重心、惯性主轴1的长度、惯性主轴2的长度、惯性主轴1的方向、惯性主轴2的方向、对称属性(例如,(惯性主轴1的长度)/(惯性主轴2的长度))、被赋予的标签、指示距离区段的区段信息及类似特征。当发现存在多个区域其中每个区域被确定为对应于对象550时,对象信息生成器131提取关于每个对象
550的特征(每个区域对应于相应的对象550)。简而言之,对象信息生成器131被配置为生成包括对象550的特征(多个特征)的对象信息,该对象的特征(多个特征)包括从由面积、长度、列方向的第一矩、行方向的第一矩、第二矩、重心、主轴以及对称性组成的组中选择的至少一个。
100.在特征的提取(s5)之后,对象信息生成器131关于每个对象550(与对象550对应的连续像素311的每个区域)生成具有作为对象的多个特征的值的分量的一条矢量数据(s6)。该条矢量数据具有与所提取的特征的类型的数量相对应的尺寸。
101.简而言之,对象信息生成器131被配置为,基于彼此连续相邻并且被确定为与一个对象550对应的像素311的区域,提取该对象550的多个特征。对象信息生成器131被进一步配置为将以该对象550的多个特征为分量的矢量数据作为该条对象信息来生成。
102.此外,对象信息生成器131执行识别处理以识别对象550。对象信息生成器131可以识别对象550是车辆或人员等,并且生成例如指示识别结果的识别数据。对象信息生成器131可以基于例如已知的图案识别方法来识别对象。
103.对象信息生成器131将生成的数据输出为对象信息(在此为一条对象信息a1)(s7)。从对象信息生成器131输出的作为对象信息(作为一条对象信息a1)的数据可包括从由对象550的rl数据、标签数据、向量数据和识别数据组成的组中选择的至少一个。该条对象信息a1可以为可解码至距离区段信号si1的数据(例如rl数据)。该条对象信息具有小于由距离区段信号si1指示的信息的数据大小的数据大小。
104.当存在两个或更多对象550时,从对象信息生成器131输出的该条对象信息a1可包括分别对应于两个或更多对象550的两条或更多条对象信息。根据图5的示例,对象信息生成器131可生成与距离区段r1相关的各条对象信息a11、a12、
…
作为该条对象信息a1。类似地,对象信息生成器131可以生成与距离区段r2相关的各条对象信息a21、a22、
…
作为该条对象信息a2。对象信息生成器131可以生成与距离区段r3相关的各条对象信息a31、a32、
…
作为该条对象信息a3。对象信息生成器131可以生成与距离区段r4相关的各条对象信息a41、a42、
…
作为该条对象信息a4。对象信息生成器131可以生成与距离区段r5相关的各条对象信息a51、a52、
…
作为该条对象信息a5。各条对象信息a11、a12、a21、a22、a31、a32、a41、a42、a51、a52、
…
中的每一条可以包括一条矢量数据。
105.区段间信息生成器132被配置为,当在多个距离区段r1至r5中的不同的两个距离区段的每一个中发现存在对象550时,基于两个对象550的矢量数据之间的距离来确定存在于两个距离区段中的两个对象550是否属于同一对象。作为示例,当一个对象550跨越两个距离区段r1、r2的边界时,区段间信息生成器132可基于存在于距离区段r1中的对象550和存在于距离区段r2中的对象550的矢量数据之间的距离来确定它们属于同一对象550。
106.具体地,区段间信息生成器132例如从第一生成器1311接收包括与对象550有关的一条矢量数据的一条对象信息a11,并从第二生成器1312接收包括与对象550有关的一条矢量数据的一条对象信息a21。在接收到该条对象信息a11和该条对象信息a2时,区段间信息生成器132计算矢量数据与矢量数据之间的距离如图12所示。当发现计算出的距离小于阈值时,区段间信息生成器132确定这两个对象550彼此属于同一对象,并将确定结果输出到输出单元14。另一方面,当发现计算出的距离等于或大于阈值时,区段间信
息生成器132确定这两个对象550是彼此不同的对象,并将确定结果输出到输出单元14。区段间信息生成器132对包含在不同条对象信息中的不同条矢量数据的每个组合进行这种确定处理,并将确定结果输出到输出单元14。例如,关于该条对象信息a1和该条对象信息a2的组合,区段间信息生成器132例如对以下执行确定处理:该条对象信息a11和该条对象信息a21的组合,该条对象信息a11和该条对象信息a22的组合,该条对象信息a12和该条对象信息a21的组合,以及该条对象信息a12和该条对象信息a22的组合。应注意,在图12中以三维示出了各条矢量数据,但是如上所述,各条矢量数据的维度可以与特征的数量相对应。
107.距离图像生成器133被配置为生成包括多个距离区段r1至r5的距离可测量范围fr的距离图像im100。距离图像生成器133被配置为基于分别与多个距离区段r1至r5相关联的多个距离区段信号si1至si5生成距离图像im100。距离图像生成器133将颜色(或权重)赋予像素311的与对象550对应的区域,使得不同的颜色(或权重)被赋予由多个距离区段信号si1至si5指示的不同的距离区段图像im1至im5。然后,距离图像生成器133将赋予了颜色(权重)的多个距离区段图像im1至im5彼此相加,由此生成距离图像im100。距离图像生成器133将指示所生成的距离图像im100的数据输出到输出单元14。
108.在该实施例中,距离图像生成器133被配置为在对象信息生成器131生成关于至少一个距离区段r1的一条对象信息之后生成距离图像im100。具体地,在对象信息生成器131完成关于至少一个距离区段r1的该条对象信息的生成处理之后,距离图像生成器133开始距离图像im100的生成处理。图13示出以下之间在时间轴上的示意性关系:由光学传感器3执行的光接收操作;由对象信息生成器131执行的各条对象信息的生成操作;由输出单元14执行的各条对象信息的输出操作;以及由距离图像生成器133执行的距离图像im100的生成(合成)操作。在图13中,线“测量”指示在多个距离区段r1至r5中的其中利用光学传感器3执行距离测量的距离区段。线“信息生成”指示距离区段信号si1至si5中对象信息生成器131通过对其执行信号处理而从其生成一条对象信息的距离区段信号。线“数据输出”指示在各条对象信息a1至a5中从输出单元14输出的一条对象信息。线“合成”指示距离图像生成器133生成距离图像im100的时机。注意,图13的每条线中的箭头的原点指示处理(测量、生成、输出或合成)的开始时间,并且箭头的末端指示处理的结束时间。
109.如图13所示,光学传感器3在时间点t0至时间点t1之间的时间段(下文中称为“时间段t1”)期间执行与距离区段r1相关的测量,以生成距离区段信号si1。而且,光学传感器3在时间点t1至时间点t2之间的时间段(下文中称为“时间段t2”)期间执行与距离区段r2相关的测量,以生成距离区段信号si2。光学传感器3在时间点t2至时间点t3之间的时间段(下文中称为“时间段t3”)期间执行与距离区段r3相关的测量,以生成距离区段信号si3。光学传感器3在时间点t3至时间点t4之间的时间段(下文中称为“时间段t4”)期间执行与距离区段r4相关的测量,以生成距离区段信号si4。光学传感器3在时间点t4至时间点t5之间的时间段(下文中称为“时间段t5”)期间执行与距离区段r5相关的测量,以生成距离区段信号si5。
110.对象信息生成器131使用与由光学传感器3进行的测量已完成的距离区段相关联的距离区段信号,针对按顺序排列的各距离区段执行与对象有关的确定处理。具体地,对象信息生成器131在时间段t2期间处理距离区段信号si1,在时间段t3期间处理距离区段信号si2,在时间段t4期间处理距离区段信号si3,在时间段t5期间处理距离区段信号si4,以及
在时间点t5与时间点t6之间的时间段期间处理距离区段信号si5。也就是说,例如,对象信息生成器131对在时间段t1光学传感器3的测量完成的距离区段r1相关联的距离区段信号si1执行处理,而无需等待光学传感器3完成关于整个距离区段的测量(在时间点t5时)。与在关于整个距离区段的测量完成之后执行距离区段信号的处理的情况相比,这允许以半实时执行处理。
111.输出单元14还顺序输出由对象信息生成器131生成的各条对象信息a1至a4,而无需等待光学传感器3完成关于整个距离区段的测量(在时间点t5时),如图13所示。
112.根据该时间线生成并输出各条对象信息a1至a5,并且因此在对象信息生成器131生成关于至少一个距离区段r1的该条对象信息a1之后,距离图像生成器133生成距离图像im100。这是因为距离图像im100的生成处理要求与所有距离区段r1至r5相关联的各个距离区段信号si1至si5。
113.输出单元14被配置为将由对象信息生成器131生成的各条对象信息、区段间信息生成器132的确定结果和由距离图像生成器133生成的距离图像im100输出到呈现单元15或外部装置6中的至少一个。如上所述,输出单元14被配置为,在生成距离图像之前输出关于至少一个距离区段(距离区段r1)的一条对象信息(该条对象信息a1)。输出单元14可以被进一步配置为输出距离区段图像im1至im5。输出单元14可以被配置为以无线信号的形式输出信息。
114.呈现单元15被配置为视觉地呈现从输出单元14输出的信息。呈现单元15例如可以包括二维显示器,例如液晶显示器或有机el显示器。呈现单元15可以包括三维显示器,以三维地显示距离图像。也就是说,呈现单元15被配置为视觉地呈现距离图像im100。
115.综上所述,由以上描述可理解,本实施例的信息处理系统100被配置为基于与目标距离区段相关联的距离区段信号,生成关于存在于多个距离区段r1至r5中的每一个中的对象550的该条对象信息。这可以有助于减少处理时间。
116.当传感器系统200用于障碍物检测目的时,外部装置6所必需的所有信息可以是存在任何对象550的距离区段。在这种情况下,不需要使用整个距离可测量范围fr的距离图像来确定对象550的准确距离。在这种情况下,可以优选地使用本实施例的信息处理系统100。
117.此外,与距离图像被输出到外部装置6并且对象信息由外部装置6生成的情况相比,本实施例的信息处理系统100可显著地减小输出到外部装置6的信息的数据大小。
118.根据光接收单元31包括总共100000个像素311的特定情况更详细地进行说明,这些像素以100行
×
100列的矩阵图案排列。在这种情况下,通过向不同距离区段的对象550赋予不同颜色而生成的距离图像可以具有例如3m字节的数据大小(像素的数量:100000
×
3字节(rgb))。距离图像的该3m字节数据被输出到外部装置6。
119.另一方面,在本实施例的信息处理系统100中,由对象信息生成器131处理的距离区段图像im10是二值图像,并且可以具有1m字节的数据大小。在对象信息生成器131处理距离区段图像im10以获得rl数据之后,例如,在距离区段图像im10内存在两个区域(每个区域对应于对象550)的情况下,数据大小可以减小到8k字节(=2(对象的数量)
×
4字节(一个对象的数据大小=维数(2)
×
坐标值)
×
1000(行数)。当数据被进一步压缩成包括10个特征作为其分量的矢量数据时,数据大小被减小到80字节(=4字节(一个特征的数据量)
×
10(特征的数量)
×
2(对象的数量))。在距离区段的数量为5的情况下,这可以将要输出的数据大
小减小到400字节那么小。因此,本实施例的信息处理系统100可通过减小要输出的数据大小来提高处理速度。
120.(3)变型
121.上述实施例仅是本公开的各种实施例中的一个,并且在不脱离本公开的范围的情况下,可以取决于设计选择或任何其它因素,容易地修改、改变、替换或与任何其它实施例组合。而且,与根据上述实施例的信息处理系统100的功能相同的功能可以被实现为例如计算机程序或在其上存储计算机程序的非暂时性存储介质。
122.根据一个方面的信息处理方法是对由光学传感器3生成的电信号si10指示的信息执行处理的信息处理方法。光学传感器3包括配置为接收反射光l2的光接收单元31,该反射光l2是的从发光单元2朝向目标空间500发射的、从目标空间500内的距离可测量范围fr反射的测量光l1。光学传感器3根据光接收单元31的多个像素311中已经接收到反射光l2的像素311生成电信号si10。该信息处理方法包括生成对象信息a1至a5。一条对象信息a1是指示目标距离区段r1中存在的对象550的特征的信息。目标距离区段r1是从通过根据从发光单元2发射测量光l1的时间点开始经过的时间差划分距离可测量范围fr而定义的多个距离区段r1至r5中选择的一个。电信号si10包括分别与多个距离区段r1至r5相关联的多个距离区段信号si1到si5。该信息处理方法包括基于多个距离区段信号si1至si5中与目标距离区段r1相关联的距离区段信号si1生成该条对象信息a1。该信息处理方法包括输出各条对象信息a1至a5。
123.根据一个方面的程序是被配置为使一个或更多处理器执行信息处理方法的程序。程序可以存储在计算机可读介质上。
124.下文中将描述实施例的变型。下文中描述的变型可以适当地与上述实施例组合。
125.根据本公开的信息处理系统100中的测量控制器11和信号处理器13包括计算机系统。计算机系统可以包括作为主要硬件部件的处理器和内存。根据本公开的处理器35的功能可以通过使处理器执行存储在计算机系统的内存中的程序来执行。程序可以被预先存储在计算机系统的内存中。可替代地,程序也可以通过电信线路下载,或者在已经被记录在诸如内存卡、光盘或硬盘驱动器的任何对于计算机系统都可读的一些非暂时性存储介质中之后被分发。计算机系统的处理器可以由单个或多个电子电路构成,包括半导体集成电路(ic)或大规模集成电路(lsi)。如本文中使用的,诸如ic或lsi的“集成电路”取决于其集成度而被称为不同的名称。集成电路的例子包括系统lsi、甚大规模集成电路(vlsi)和超大规模集成电路(ulsi)。可选地,在lsi已经被制造之后要被编程的现场可编程门阵列(fpga)或者允许lsi内部的连接或电路区段被重新配置的可重新配置逻辑器件也可以被采用为处理器。那些电子电路可以一起集成在单个芯片上,或者分布在多个芯片上,无论哪个都是合适的。那些多个芯片可以一起集成在单个装置中,或者分布在多个装置中,而没有限制。如本文中使用的,“计算机系统”包括微控制器,该微控制器包括一个或更多处理器和一个或更多内存。从而,微控制器也可以实现为单个或多个电子电路,包括半导体集成电路或大规模集成电路。
126.此外,在上述实施例中,信息处理系统100的多个组成元件(或功能)被一起集成在单个外壳中。然而,这仅是示例,而不应被解释为限制性的。可替代地,信息处理系统100的那些组成元件(或功能)可以分布在多个不同的外壳中。仍然可替代地,信息处理系统100的
至少一些功能也可以被实现为云计算系统。相反,信息处理系统100的多个功能可以一起集成在单个外壳中。
127.在一种变型中,信息处理系统100可以包括时间间信息生成器134,如图14所示。对象信息生成器131可以被配置为基于在不同时机生成但与相同距离区段r1相关联的两个距离区段信号si101、si102,分别生成两个距离区段图像。对象信息生成器131可以被进一步配置为生成两条对象信息a101、a102,其中的每一条对象信息与被确定为包括在两个距离区段图像中的对应一个距离区段图像中的对象550有关。两条对象信息a101、a102中的每一个包括被确定为包括在两个距离区段图像中的对应一个中的对象550的一条矢量数据。时间间信息生成器134可以被配置为,当发现存在被确定为包括在两个距离区段图像中的对象550时,基于被确定为包括在两个距离区段图像中的对象550的各条矢量数据之间的距离,来确定被确定为包括在两个距离区段图像中的对象550是否属于同一对象。
128.根据图14的示例,距离区段信号si101、si102与相同的距离区段r1相关联地生成,但是在不同的时机。在该示例中,首先根据距离区段r1上的距离测量生成距离区段信号si101,并且然后顺序地生成与其它距离区段r2至r5相关联的距离区段信号si2至si5,此后根据距离区段r1上的下一个距离测量生成距离区段信号si102。
129.在一种变型中,传感器系统200可以不根据如在该实施例中的直接tof方法,而根据间接tof方法来生成距离区段信号(多个距离区段信号)。
130.在一种变型中,信息处理系统可以进一步基于距离图像im100生成多条对象信息(a1至a5)。
131.(4)方面
132.如从上述实施例和变型所理解的,本公开公开了以下方面。
133.第一方面的信息处理系统(100)是用于对由光学传感器(3)生成的电信号(si10)指示的信息执行处理的信息处理系统。光学传感器(3)包括配置为接收反射光(l2)的光接收单元(31),该反射光(l2)是从发光单元(2)朝向目标空间(500)发射、从目标空间(500)内的距离可测量范围(fr)反射的测量光(l1)。光接收单元(31)包括多个像素(311)。电信号(si10)指示与多个像素(311)中已经接收到反射光(l2)的像素(311)有关的信息。信息处理系统(100)包括对象信息生成器(131)和输出单元(14)。对象信息生成器(131)被配置为生成对象信息(a1至a5)。一条对象信息(a1)指示存在于目标距离区段(r1)中的对象(550)的特征。目标距离区段(r1)是从根据从发光单元(2)发射测量光(l1)的时间点起经过的时间差来划分距离可测量范围(fr)而定义的多个距离区段(r1至r5)中选择的一个。电信号(si10)包括分别与多个距离区段(r1至r5)相关联的多个距离区段信号(si1至si5)。对象信息生成器(131)被配置为基于多个距离区段信号(si1至si5)中与目标距离区段(r1)相关联的距离区段信号(si1)来生成该条对象信息(a1)。
134.该方面可有助于减少处理时间。
135.参考第一方面的第二方面的信息处理系统(100)进一步包括距离图像生成器(133)。距离图像生成器(133)被配置为基于分别与多个距离区段(r1至r5)相关联的多个距离区段信号(si1至si5)生成距离可测量范围(fr)的距离图像(im100)。距离图像生成器(133)被配置为,在对象信息生成器(131)生成与多个距离区段中的至少一个距离区段(r1)有关的该条对象信息(a1)之后,生成距离图像(im100)。
136.该方面可有助于减少处理时间。
137.参考第二方面的第三方面的信息处理系统(100)进一步包括配置为视觉地呈现距离图像(im100)的呈现单元(15)。
138.该方面允许用户看到距离图像(im100),由此允许用户容易地理解目标空间(500)的状态。
139.在第四方面的信息处理系统(100)中,参考第二或第三方面,输出单元(14)被配置为,在距离图像生成器(133)生成距离图像(im100)之前,输出与至少一个距离区段(r1)有关的该条对象信息(a1)。
140.该方面允许外部装置(6)接收与距离区段(r1)有关的对象信息(a1)并对该条对象信息(a1)执行处理,而无需等待距离图像(im100)的生成。
141.在第五方面的信息处理系统(100)中,参考第一至第四方面中的任何一个,多个像素(311)以二维阵列排列。对象信息生成器(131)被配置为,基于与目标距离区段(r1)相关联的距离区段信号(si1),生成由多个像素(311)的像素值表示的距离区段图像(im10)。像素值分别指示多个像素是否已经接收到反射光(l2)。对象信息生成器(131)被配置为从构成距离区段图像(im10)的多个像素(311)提取接收到反射光l2并且彼此连续相邻的像素(311)的区域,并且然后确定该区域对应于作为对象的一个对象(550)。对象信息生成器(131)被配置为,在发现距离区段图像(im10)内存在多个区域、其中每个区域被确定为与一个对象550对应的情况下,向多个对象550赋予不同的标签(obj1,obj2)。
142.该方面可有助于减少对该条对象信息(a1)执行处理的装置(例如外部装置6)的处理负荷。
143.在第六方面的信息处理系统(100)中,参考第一至第五方面中的任何一个,光学传感器(3)被配置为基于多次光接收操作的结果来确定多个像素(311)中的每一个是否接收到反射光(l2)。多次光接收操作中的每一个包括来自发光单元(2)的测量光(l1)的发射和像素(311)的曝光操作。
144.该方面可有助于减少噪声的影响。
145.在第七方面的信息处理系统(100)中,参考第一至第六方面中的任何一个,多个像素(311)以二维阵列排列。对象信息生成器(131)被配置为基于与目标距离区段(r1)相关联的距离区段信号(si1)生成由多个像素(311)的像素值表示的距离区段图像(im1)。像素值分别指示多个像素是否已经接收到反射光(l2)。对象信息生成器(131)被配置为,从组成距离区段图像(im1)的多个像素(311)中提取已经接收到反射光l2并且彼此连续相邻的像素(311)的区域,并且然后确定该区域对应于作为对象的一个对象(550)。对象信息生成器(131)被配置为,基于彼此连续相邻并且被确定为对应于该一个对象(550)的像素(311)的区域,提取该一个对象(550)的多个特征。该条对象信息(a1)包括分量是一个对象(550)的多个特征的一条矢量数据。
146.该方面可有助于减少处理时间。
147.参考第七方面的第八方面的信息处理系统(100)进一步包括区段间信息生成器(132)。区段间信息生成器(132)被配置为,当发现对象(550)存在于多个距离区段(r1至r5)中不同的两个距离区段(r1,r2)中的每一个中时,基于存在于两个距离区段中的对象(550)的各条矢量数据之间的距离,确定存在于两个距离区段中的对象是否属于同一对象。
148.该方面可以使得容易确定存在于不同距离区段中的对象(550)是否属于同一对象。
149.在第九方面的信息处理系统(100)中,参考第七或第八方面,对象信息生成器(131)被配置为,基于在不同时机生成但与同一距离区段(r1)相关联的两个距离区段信号(si101,si102),分别生成两个距离区段图像。对象信息生成器(131)被配置为生成两条对象信息(a101,a102),其中每条对象信息与被确定为包括在两个距离区段图像中的对应的一个中的对象(550)有关。两条对象信息(a101,a102)中的每条包括被确定为包括在两个距离区段图像中的对应的一个中的对象(550)的一条矢量数据。信息处理系统(100)被配置为,当发现存在被确定为包括在两个距离区段图像中的每一个中的对象(550)时,基于被确定为包括在两个距离区段图像中的对象(550)的各条矢量数据之间的距离来确定被确定为包括在两个距离区段图像中的对象(550)是否属于同一对象。
150.该方面可以使得容易确定与同一距离区段(r1)相关联地生成的不同距离区段图像中存在的对象(550)是否属于同一对象。
151.在第十方面的信息处理系统(100)中,参考第一至第九方面中的任何一个,该条对象信息(a1)具有可解码为距离区段信号(si1)的形式。该条对象信息(a1)具有小于距离区段信号(si1)所指示的信息的数据大小的数据大小。
152.该方面可有助于减少处理时间。
153.第十一方面的传感器系统(200)包括第一至第十方面中的任何一个的信息处理系统(100)以及光学传感器(3)。
154.该方面可有助于减少处理时间。
155.第十二方面的信息处理方法是用于对由光学传感器(3)生成的电信号(si10)指示的信息执行处理的信息处理方法。光学传感器(3)包括配置为接收反射光(l2)的光接收单元(31),该反射光(l2)是从发光单元(2)朝向目标空间(500)发射的、从目标空间(500)内的距离可测范围(fr)反射的测量光(l1)。光接收单元(31)包括多个像素(311)。电信号(si10)指示与多个像素(311)中已经接收到反射光(l2)的像素(311)有关的信息。该信息处理方法包括生成对象信息(a1至a5)。一条对象信息(a1)指示存在于目标距离区段(r1)中的对象(550)的特征。目标距离区段(r1)是从根据从发光单元(2)发射测量光(l1)的时间点起经过的时间差来划分距离可测量范围(fr)而定义的多个距离区段(r1至r5)中选择的一个。电信号(si10)包括分别与多个距离区段(r1至r5)相关联的多个距离区段信号(si1至si5)。生成对象信息的步骤包括基于多个距离区段信号(si1至si5)中与目标距离区段(r1)相关联的距离区段信号(si1)生成该条对象信息(a1)。该信息处理方法包括输出对象信息(a1至a5)。
156.该方面可有助于减少处理时间。
157.第十三方面的程序是被配置为使一个或更多处理器执行第十二方面的信息处理方法的程序。
158.该方面可有助于减少处理时间。
159.附图标记列表
[0160]2ꢀꢀꢀꢀꢀꢀꢀ
发光单元
[0161]3ꢀꢀꢀꢀꢀꢀꢀ
光学传感器
[0162]
31
ꢀꢀꢀꢀꢀꢀ
光接收单元
[0163]
311
ꢀꢀꢀꢀꢀ
像素
[0164]
100
ꢀꢀꢀꢀꢀ
信息处理系统
[0165]
131
ꢀꢀꢀꢀ
对象信息生成器
[0166]
132
ꢀꢀꢀꢀ
区段间信息生成器
[0167]
133
ꢀꢀꢀꢀ
距离图像生成器
[0168]
134
ꢀꢀꢀꢀ
时间间信息生成器
[0169]
14
ꢀꢀꢀꢀꢀ
输出单元
[0170]
15
ꢀꢀꢀꢀꢀ
呈现单元
[0171]
200
ꢀꢀꢀꢀ
传感器系统
[0172]
500
ꢀꢀꢀꢀ
目标空间
[0173]
550
ꢀꢀꢀꢀ
对象
[0174]
a1至a5
ꢀꢀꢀꢀ
对象信息
[0175]
fr
ꢀꢀꢀꢀꢀ
距离可测量范围
[0176]
im10
ꢀꢀꢀ
距离区段图像
[0177]
im100
ꢀꢀ
距离图像
[0178]
l1
ꢀꢀꢀꢀꢀ
测量光
[0179]
l2
ꢀꢀꢀꢀ
光(反射光)
[0180]
obj1,obj2 标签
[0181]
r1至r5
ꢀꢀꢀꢀ
距离区段
[0182]
si1至si5
ꢀꢀ
距离区段信号
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。