换电agv小车使用多导航设备进行导航定位的方法
技术领域
1.本发明涉及换电技术领域,尤其涉及换电agv小车使用多导航设备进行导航定位的方法。
背景技术:
2.激光导航以其高精度在实际中应用较广,但是价格昂贵,且在没有丰富特征物体的环境内容易出现定位丢失;二维码导航的成本低但需要长期维护;惯性导航是一种自然的导航方式,但传感器的误差累计会造成漂移;基于视觉的检测可以识别出丰富的特征,但误差较大,而且目前的换电方式受限于在建设好的换电站中进行,难以扩展到更多区域,为了在更多开放区域方便电动车的换电操作,设计一种可以在空间中(如地下或地上的停车场)自由移动的装置,通过导航、定位及识别等智能技术,对车辆进行自动换电。
3.因此,需要一种换电agv小车使用多导航设备进行导航定位的方法来实现稳定地在狭小区域内进行导航、定位,并进行换电操作。
技术实现要素:
4.本发明旨在提供换电agv小车使用多导航设备进行导航定位的方法克服上述问题或者至少部分地解决上述问题。
5.为达到上述目的,本发明的技术方案具体是这样实现的:
6.本发明的提供了换电agv小车使用多导航设备进行导航定位的方法,包括以下步骤:
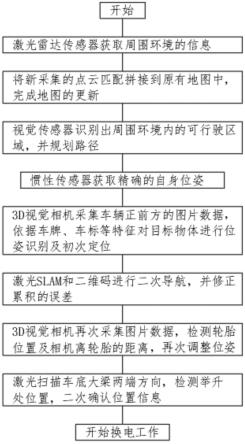
7.步骤一,换电agv小车通过激光雷达传感器获取周围环境的信息;
8.步骤二,将来自激光雷达新采集的点云匹配拼接到原有地图中,完成地图的更新;
9.步骤三,使用深度相机,通过其上的视觉传感器,识别出周围环境内的可行驶区域,并规划路径;
10.步骤四,结合惯性传感器,获取精确的自身位姿;
11.步骤五,换电agv小车根据导航找到目标车辆后,通过换电agv小车上装载的3d视觉相机采集车辆正前方的图片数据,依据车牌、车标等特征对目标物体进行位姿识别及定位,根据检测结果信息实现换电agv小车的初步调整,并实现换电agv小车与车辆位置对中定位;
12.步骤六,利用换电agv小车的激光slam和二维码导航,换电agv小车导航到待换电车辆举升位置处,且使用二维码作为辅助特征,并修正累积的误差;
13.步骤七,再次启动换电agv小车上的两个3d视觉相机开始拍照采集图片数据,检测轮胎位置及相机离轮胎的距离,调节换电agv小车的位姿,使得3d视觉相机距离轮胎距离适中;
14.步骤八,利用激光扫描仪扫描车底大梁两端方向,检测举升处位置,二次确认位置信息无误,满足既定条件后,换电agv小车开始工作。
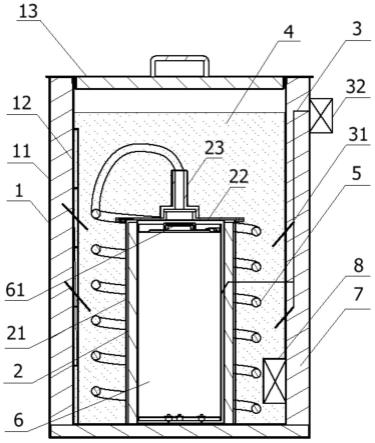
15.作为本发明进一步的方案,所述换电agv小车包括换电总成agv、换电agv小车、举升agv,且换电总成agv、换电agv小车、举升agv三部分都采用激光slam和地面二维码复合导航方式,实现agv导航。
16.作为本发明进一步的方案,所述深度相机分别识别和定位车头以及识别和定位车牌。
17.作为本发明进一步的方案,所述激光扫描仪识别和定位车轮,并融合算法,精准定位车身位姿。
18.作为本发明更进一步的方案,在所述步骤三和步骤四中,换电agv小车在行驶过程中,由于光线变化、外物遮挡,会导致激光雷达扫描的特征较少,无法计算出自身的位置信息,此时需要二维码读码器读取路径上的二维码信息,即二维码导航方式,辅助换电agv小车找到自身位置信息。
19.作为本发明更进一步的方案,在所述步骤九中,还利用激光扫描仪对电池上的螺丝特征进行识别和定位,实现对电池的拆卸和抓取。
20.本发明提供了换电agv小车使用多导航设备进行导航定位的方法,有益效果在于:通过设备扫描封闭空间物理位置,绘制电子地图,并通过起始点标注,实现基于电子地图的路线规划,通过激光设备扫描相对物体特征点,通过计算相对位置偏差,驱动设备移动矫正位置,实现相对位置对称,同时让扫头设备识别控制设备精细化移动,实现狭小空间范围内的非接触式的精准定位,实现两个设备的对接,通过多导航设备进行进行协同作用,实现了精细化的导航和定位,便于在不同环境下进行换电操作,操作简单,智能化程度高。
附图说明
21.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域的普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图。
22.图1为本发明的工作流程示意图。
23.图2为本发明中换电agv小车导航时位姿调整的局部流程图。
24.图3为本发明中换电agv小车举升时位姿调整的局部流程图。
25.图4为本发明中轮胎激光定位示意图。
26.图5为本发明中换电agv小车与换电车辆之间的位置示意图。
具体实施方式
27.下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
28.参见图1-5,本发明实施例提供的换电agv小车使用多导航设备进行导航定位的方法,包括以下步骤:
29.步骤一,换电agv小车通过激光雷达传感器获取周围环境的信息,并对原始数据做
优化,将一些有问题的数据进行剔除,或进行滤波;
30.步骤二,将来自激光雷达新采集的点云匹配拼接到原有地图中,完成地图的更新;
31.步骤三,使用深度相机,并通过其上的视觉传感器,识别出周围环境内的可行驶区域,并规划路径;
32.步骤四,结合惯性传感器,获取精确的换电agv小车自身位姿;
33.步骤五,换电agv小车根据导航找到目标车辆后,通过换电agv小车上装载的3d视觉相机采集车辆正前方的图片数据,依据车牌、车标等特征对目标物体进行位姿识别及定位,根据检测结果信息实现换电agv小车的初步调整,并实现换电agv小车与车辆位置对中定位;
34.步骤六,利用换电agv小车的激光slam和二维码导航,换电agv小车导航到待换电车辆举升位置处,且使用二维码作为辅助特征,并修正累积的误差;
35.步骤七,再次启动换电agv小车上的两个3d视觉相机开始拍照采集图片数据,检测轮胎位置及相机离轮胎的距离,调节换电agv小车的位姿,使得3d视觉相机距离轮胎距离适中;
36.步骤八,利用激光扫描仪扫描车底大梁两端方向,检测举升处位置,二次确认位置信息无误,满足既定条件后,换电agv小车开始工作。
37.在步骤三和步骤四中,换电agv小车在行驶过程中,由于光线变化、外物遮挡,会导致激光雷达扫描的特征较少,无法计算出自身的位置信息,此时需要二维码读码器读取路径上的二维码信息,即二维码导航方式,辅助换电agv小车找到自身位置信息。
38.在步骤九中,还利用激光扫描仪对电池上的螺丝特征进行识别和定位,实现对电池的拆卸和抓取。
39.本发明在使用过程中,激光雷达传感器获取周围环境的信息,并对原始数据做优化,将一些有问题的数据进行剔除,或进行滤波,并传输给外部处理终端,外部处理终端将来自激光雷达新采集的点云匹配拼接到原有地图中,完成地图的更新,使用深度相机,并通过其上的视觉传感器,识别出周围环境内的可行驶区域,并规划路径,结合惯性传感器,获取精确的换电agv小车自身位姿,将所规划的路径以及换电agv小车的自身位姿全部传输到电子地图上,同时将该信息同步传输给换电agv小车,并控制换电agv小车按照规划路径进行移动。
40.换电agv小车根据规划进行移动,并通过导航找到目标车辆后,通过换电agv小车上装载的3d视觉相机采集车辆正前方的图片数据,依据车牌、车标等特征对目标物体进行位姿识别及定位,根据检测结果信息实现换电ag小车初步调整,实现换电agv小车与车辆位置对中定位,通过3d视觉相机调节好换电总成的位姿后,换电agv小车处于车头居中位置,同时换电agv小车装有激光雷达在车头正前方,将激光雷达放置车头正下方,扫描四个车轮,获取车身停放位姿,调整换电总成位姿,此时扫描四个轮胎获取激光点云图,在点云图像上的识别出车轮的轮廓,利用车轮的轮廓来判定车身姿态,微调换电总成位姿,完成车辆对中定位,且换电agv小车依靠导航行驶到待换电车辆停放的正前方,要求换电agv小车与车头平行、离车头距离设置为≥1500mm,误差≤50mm。
41.换电agv小车的两端位置上分别安装两个3d摄像头,用来检测轮胎位置与距离,当两个3d视觉相机与对应的轮胎距离一致时,用激光再次确认,满足条件后,即换电agv小车
定位成功。
42.以上仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。