1.本发明涉及资源与环境技术领域,尤其涉及一种可自主选择净化水域的智能生态浮岛装置。
背景技术:
2.随着经济的快速发展,我国所面临的水环境污染问题日益严重,湖泊、水库、水塘等地水质恶化及富营养化问题日渐突出。目前,我国在上述静水环境的水质治理领域基本采用的还是代价大、耗能高、自动化程度较低的治理方式,其中主要代表为:粗放型的化学试剂投放、大面积和高耗能的净水设备铺设以及固定式的水生植物种植。传统的净水方式,已经不能满足实际生活中人们低碳高效地净化水质的要求。目前我国的水质治理工程依然对移动生态浮岛的研究与应用相对不足。而非移动式生态浮岛方法,治理过程中考虑到污染物可能会随着水流进行扩散迁移,要达到一定的净化效果则需要浮岛覆盖面积达到水面的30%以上。因此,市场提出了提高浮岛的治理效率,满足社会可持续化发展,低能耗地利用生态杠杆提高治理效益的需要。
技术实现要素:
3.为了解决上述问题,本发明提供了一种可自主选择净化水域的智能生态浮岛装置,本发明装置综合生态学、自动化设计、机械设计与计算机程序领域,使水域生态治理工作更加更加经济、灵活、智能化,符合现代化社会的发展要求。
4.该智能生态浮岛装置包括主控单元、供电单元、推进单元、锚定单元、监测单元、通信单元、定位单元、上位机软件和云平台,所述推进单元包括推进器,包括铁锚、减速电机和超声波收发装置;
5.上位机开机,并进行系统初始化,通过遥感或地理信息数据库获得待治理水域形状的栅格数据,将数据输入上位机软件中;在上位机软件中依据目标水域的经纬度信息,使用遍历算法,计算得到“s”型的最佳路径,通过云平台发送至浮岛主控单元;
6.主控单元启动两侧推进器,开始缓慢巡航;在航行过程中,主控单元将定位单元获取的当前位置与预定轨迹进行实时对比,若浮岛轨迹发生偏离,则通过控制算法进行轨迹纠正;浮岛侧面的超声波收发装置在浮岛行进中检测障碍物,在主控单元的控制下实现自主避障;主控单元通过调节浮岛两侧推进器的转速控制速度,利用差速实现转向;
7.浮岛运动的同时,监测单元实时读取水质数据,由主控单元内置程序判断出水质状况;当主控单元判断水质评分劣于阈值,则关闭推进器,系统判断开始治理;
8.放锚前,由浮岛上的超声波收发装置向水底发射信号测出水深d,主控单元确定放锚长度,同时应对水位上涨;
9.放锚后超声波收发装置每半时测一次水深,检测到水位有涨跌,主控单元控制电机调整放出的锚绳长度;
10.浮岛停下后,检测单元每隔4小时采集一次水质信息,当连续多次采集到水质优于
阈值后,主控单元控制减速电机将铁锚提升至浮岛底部;主控单元控制开动推进器,浮岛沿原定轨迹继续遍历剩余水域,直至完成整个水域的治理;全过程采用通信单元将水质和位置坐标上传到云平台,用户在终端登录云平台后可查看数据和下发指令,可实现一键召回和前往特定位置的功能。
11.进一步地,所述主控单元采用stm32f103c8t6单片机,用于规划运动路线、读取传感器数据、评估水质状况和控制浮岛运动。
12.进一步地,所述锚定单元,包括带减速箱的直流电机和失电制动器,失电制动器和减速箱连接在直流电机的转轴上,所述失电制动器包括传动轴、衔铁、制动盘、弹簧和法兰盘,铁锚为锚重50kg球形铁锚,采用可升降铁锚固定方式进行固定球形铁锚,使用带减速箱的直流电机进行牵引,传动轴半径最大为3cm;所述减速电机为额定力矩为45kg
·
cm,额定转速15r/min,功率28w的42gx775r减速电机;超声波收发装置向水底发射信号,测量水深d,从而确定放锚长度;采用失电制动器防止直流电机停机时铁锚下坠,失电制动器通电时,衔铁被吸合,与制动盘脱离,传动轴可正常转动,直流电机断电时,电磁力消失,在失电制动器的作用下,弹簧压住衔铁,制动盘与衔铁及法兰盘之间产生摩擦力矩,用于阻止铁锚下坠。
13.进一步地,所述推进单元采用t60水下推进器,推进器采用2216直流无刷电机,单个推力1.65~2.1kg,推进器最大外径77mm,总长92mm,用于调节两侧螺旋桨的转速使浮岛前进、后退或转向。
14.进一步地,所述供电单元采用太阳能电池板将光能转换为电能,储存到锂电池中,锂电池的输出经过电压变换电路后对浮岛上所有的电子设备供电。
15.进一步地,太阳能电池板采用了50w功率的电池板,面积640mm*530mm,电池的选择,采用锂电池,电池大小选择12.6v\20a。
16.进一步地,所述监测单元包括五个水质监测传感器、传感器保护装置以及信号处理电路,该传感器保护装置包括探针外附保护壳,具体为,内筒高度20cm,直径10cm,筒壁下方均布2mm内径孔,内筒底部盖可旋开,均布2mm内径孔;内筒直接固定在设备主体下方,起到过滤泥沙和悬浮物作用;外筒通过abs轴承与设备主体连接,主要起到保护传感器不受水流冲击作用;高度50cm,直径20cm,外附等高的不对称弧形板,外筒四周均布直径10mm孔,底部盖可旋开,设计直径20mm孔,用于泥沙在重力作用下离开保护壳;该壳体为内外布孔的双层嵌套圆桶,该圆桶材质为abs塑料,可以在浮岛运动情况下,通过旋转的方式将移动过程中水流带来的冲量转化为转动量来抵消在低速移动时水流对传感器的冲击,能够有效起到保护期内监测传感器的效果。
17.进一步地,所述通信单元采用搭载窄带物联网技术的bc26模块进行信息输出与输入,采用mqtt协议,支持中国移动、中国电信、onenet/andlink、阿里云iot物联网云平台,将水质信息和位置坐标打包发送到云平台,用户在终端设备上登录云平台后即可查看数据或向浮岛发送指令,实现了浮岛与终端的双向数据传输。
18.进一步地,所述定位单元选用atk-s1216f8-bd gps/北斗模块来获取经纬度信息,支持多种通信波特率,定位精度2.5mcep。
19.进一步地,所述上位机软件在运行前,通过遥感或地理信息数据库获得待治理水域形状的栅格数据,一定大小方块的水域在其中有行列号,上位机对所有水域栅格进行逐行遍历,规划出浮岛的前进路线,然后上位机将所得路线经物联网云平台转发到浮岛上。
20.本发明提供的技术方案带来的有益效果是:本发明的装置具备设计巧妙,操作方便,能耗低、正常使用下磨损率低、低回报高收益等优点。本发明能够实现同时监测与治理水域。相较于传统浮岛占水域面积大、自动化程度低,不容易进行标准化推广等不足与化学试剂投放副作用大、物理抽出处理经济效益低等问题,本发明能够在可接受时间内,在不产生次生污染物的前提下,相当程度地对富营养化水体进行治理。为我国较为广泛存在地湖泊、水库、池塘等较为容易发生富营养化现象地水体地治理提供十分有效的装置与方法。
附图说明
21.下面将结合附图及实施例对本发明作进一步说明,附图中:
22.图1是本发明实施例中浮岛3d模型图。
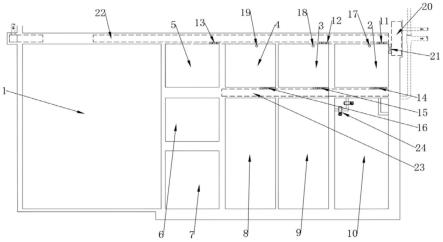
23.图2是本发明实施例中浮岛三视图。
24.图3是本发明实施例中浮岛的系统组成图。
25.图4是本发明实施例中浮岛工作流程图。
具体实施方式
26.为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
27.本发明的实施例提供了一种可自主选择净化水域的智能生态浮岛装置、设备及存储设备。
28.请参考图1,图1是本发明实施例中一种可自主选择净化水域的智能生态浮岛装置的流程图,具体包括:
29.依据附图1所示,本发明的一种可自主移动并选择净化区域的智能生态浮岛装置,包括:主控单元1、供电单元2、推进单元3、锚定单元4、监测单元5(含传感器保护装置)、水质修复单元6、通信单元7、定位单元8、防水单元9、云平台10和上位机软件11。
30.主控单元1:用于能够规划运动路线、读取传感器数据、评估水质状况、控制浮岛运动。通过综合考虑系统所需的i/o口数量、中断数量、数据处理频率、串口资源、与其他模块的兼容性等性能需求后,再综合设备成本、开发难度等因素,选择高性能、低功耗、低成本的stm32f103c8t6单片机作为主控单元,这是一款采用arm cortex-m3内核的32位mcu,72mhz的主频能提供足够的指令执行速度,64k的flash能储存足够的代码,37个gpio可满足水质传感器、电机、nb-iot模块、gps模块、超声波传感器等各个单元的使用需求,2个12位adc可将传感器采集的模拟信号转换为数字信号,4个16位定时器,其中tim1可产生pwm输出用于控制电机,16个内核中断和68个外部中断可提供充足的事件处理能力,并且本芯片支持-40~85℃的工作温度,能充分适应室外的工作环境。
31.供电单元2:太阳能电板与锂电池混合供电,增强复杂天气下的适应度和续航能力;采用太阳能电池板将光能转换为电能,储存到锂电池中,锂电池的输出经过电压变换电路后对浮岛上所有的电子设备供电。在太阳能电池板的选择上,平衡发电功率与占用面积的矛盾,使发电功率与浮岛用电量以及电池容量相匹配,避免占用过多浮岛面积。经理论测算和实验测试,本实施例中,太阳能电池板采用了50w功率的电池板,面积640mm*530mm,占用较小面积的同时又保证了足够的发电功率。在电池的选择上,采用锂电池,经实验测试和
理论测算,电池大小选择12.6v\20a可保证足够的续航。同时浮岛上应该配备电源控制单元,对电池的充放电进行管理,可有效避免过充、过放、过流、短路等危险的发生。
32.推进单元3:采用t60水下推进器,通过电机带动螺旋桨旋转给浮岛提供动力,用于调节两侧螺旋桨的转速使浮岛前进、后退或转向;推进器采用2216直流无刷电机,单个推力1.65~2.1kg,功率较小,便于控制。推进器最大外径77mm,总长92mm。
33.锚定单元4:包括带减速箱的直流电机和失电制动器,失电制动器和减速箱连接在直流电机的转轴上,所述失电制动器包括传动轴、衔铁、制动盘、弹簧和法兰盘。采用可升降铁锚固定方式固定,由直流电机通过细绳悬挂铁锚组成船锚。在本实施例中在普通湖泊为应用场景下,为避免船锚被水下的树枝等杂物挂住,采用锚重50kg球形铁锚。使用带减速箱的直流电机进行牵引,设传动转轴半径最大为3cm,选择额定力矩为45kg
·
cm,额定转速15r/min,功率28w的42gx775r减速电机。设置了一个超声波收发装置向水底发射信号,测量水深d,从而确定放锚长度。采用失电制动器防止电机停机时铁锚下坠。失电制动器通电时,衔铁被吸合,与制动盘脱离,传动轴可正常转动,断电时,电磁力消失,弹簧压住衔铁,制动盘与衔铁及法兰盘之间产生摩擦力矩,可阻止铁球下坠。避免浮岛因风、水流、水位波动的影响发生移位,能够精确治理目标水面。
34.监测单元5:包括五个水质监测传感器、传感器保护装置以及信号处理电路;传感器布置依据五点采样法,在浮岛四周及中央布置监测点。监测结果的值取五个传感器的平均值,从而增加水质监测的精确性和可靠性。其可以依据待监测指标、经济成本、灵敏度、在不同的场景下的耐用度、与主控单元的兼容性等因素进行灵活选择。监测传感器外附保护壳,防护等级为ip68。所述探针外附保护壳设计:内筒高度20cm,直径10cm,筒壁下方均布2mm内径孔,内筒底部盖可旋开,均布2mm内径孔。内筒直接固定在设备主体下方,起到过滤泥沙和悬浮物作用。外筒高度50cm,直径20cm,通过abs轴承与设备主体连接,主要起到保护传感器不受水流冲击作用,外附如图1所示等高的不对称弧形板,外筒四周均布直径10mm孔,底部盖可旋开,设计直径20mm孔,用于泥沙在重力作用下离开保护壳。该壳体为内外布孔的双层嵌套圆桶。该圆桶材质为abs塑料,可以在浮岛运动情况下,通过旋转的方式将移动过程中水流带来的冲量转化为转动量来抵消在低速移动时水流对传感器的冲击。经过科学实验,能够有效起到保护期内监测传感器的效果。在本实施例中,依据目标治理对象cod,选择了自清洁大量程cod传感器(y551-c)。该传感器灵敏度为《5%equiv.khp,经过科学实验,该传感器在工况下,工作时长可达要求。
35.水质修复单元6:浮床搭载的植物对水体进行净化;依据监测及治理工作的工作效益、当前工作水域的工作环境、治理目标及规划等统筹要求,考虑水生植物的耐盐度,耐污性能等,选择合适水生植物,在生长相对稳定期间植入。在本实施例中,选择了蕹菜这一水生植物针对cod、tp、氨氮等污染指标进行科学实验。经过科学实验,蕹菜可以在原水水质的温度20℃,ph值为7.90,总磷(tp)为0.82mg/l,nh4 -n为1.32mg/l的富营养化水环境中生长及工作情况良好,达到实验预期效果,符合相关规定。且蕹菜本身富含维生素b、维生素c、木质素等可用物质,适当处理后可以进行提取利用,提高生态浮岛经济效益。
36.通信单元7:通过综合考虑对数据稳定性、实时性、模块功耗、工作环境的通信条件及成本等方面,本实施例中采用搭载窄带物联网技术(nb-iot)的bc26模块,采用mqtt协议,支持中国移动、中国电信、onenet/andlink、阿里云iot物联网云平台。将水质信息和位置坐
标打包发送到云平台,用户在终端设备上登录云平台后即可查看数据或向浮岛发送指令,实现了浮岛与终端的双向数据传输。经多次测试,该通信单元运行稳定,可完成目标任务。
37.定位单元8:通过考虑定位精度、功耗,模块兼容性,开发难度及成本等因素,采用gps和超声波测距仪组成该定位单元,用于实现定位、巡航、避障;选用atk-s1216f8-bd gps/北斗模块来获取经纬度信息,为gps/北斗双模定位模块,体积为25mm*27mm,支持多种通信波特率,定位精度2.5mcep,经过实验测试显示,该定位单元性能稳定,功耗小,兼容性好,可以完成任务。
38.防水单元9:对控制柜、电路板和接头采用防水外壳、灌胶密封、防水胶布包裹等措施;
39.云平台10:由运营商提供的物联网云平台。
40.上位机软件11:用于规划浮岛航迹;智能生态浮岛在运行前,通过遥感或地理信息数据库获得待治理水域形状的栅格数据,一定大小方块的水域在其中有行列号,输入上位机软件中的数据形式即为栅格数据。上位机对所有水域栅格进行逐行遍历,规划出浮岛的前进路线。然后上位机将所得路线经物联网云平台转发到浮岛上。经计算机仿真测试,上述程序能够完成不同形状和大小的水域的路线规划,并完成发送。本实施例中,用户终端控制方面,采用基于qt开发、floyd算法的计算方式,确定当前位置和目标点位置后,依据水域的坐标信息,计算出最短的巡航路径,然后通过物联网云平台发送给浮岛。
41.浮床主体,承载设备和植物。基体采用abs塑料制成,设备的整体面积需要综合考虑治理水域面积、移动过程中的水动力因素、可搬运性等综合考虑(在本实施例中,治理水域面积100亩的情况下,设备设计整体规格为3*3m)。
42.制造浮岛主体(示例中,制作浮岛整体采用abs材料,主体长宽均为3m,高度0.5m,壁厚0.03cm,内部中空密闭。浮岛中间主体2*3m,厚度1m。两侧组成为可拆卸abs塑料块,长款均为0.375m,高度0.5米,内部中空密闭,四周带有卡扣可以相互连接。浮岛中间主体可提供18000n以上浮力。可通过连接卡口,增加相连组成模块的方式,增加浮岛浮力。浮岛承托起重锚与电机部分,下部填充abs塑料。
43.在完成上述单元的选择后,依据图1、图1所示进行构件与浮岛主体组装。在本实施例中,基体采用abs塑料制成。两侧小方格可拆卸和加装,能灵活调节浮岛面积;浮岛两侧的底部各装有一个螺旋桨推进器;浮床中心开洞,通过吊绳悬挂50kg重球作为船锚,吊绳另一端用带失电制动器的减速电机牵引;浮岛中部装有太阳能电池板、锂电池和控制柜,控制柜内置有主控单元和浮岛的主要电路;传感器依据五点采样法布置于浮岛下侧的四角和中心。传感器外覆保护壳,保护壳分内外层。浮岛主体上分布着各部件的具体分布如图1、图2所示。浮岛各部分工作关系依图3所示。完成主控单元、供电单元、推进单元、锚定单元、监测单元(含传感器保护装置)、通信单元、定位单元、防水装置、上位机软件的组装后,依据目标治理对象,选择合适的水生植物,合理的点位种植。
44.在完成浮岛的组装后,依据目标治理对象,由专业人员结合具体情况制定治理方案,选择合适的水生植物,合理的点位种植。工作人员对设备整体称重,与计算所得的预测浮力比较,判断是否需要增加中空塑料组成单元,示例中,计算重力浮力阈值时,重力不得大于下水前浮力的70%。工作人员对设备进行最后检查与调试,设备下水。设备下水开机后,浮岛将按照图4执行如下工作程序:
45.(1)开机,系统初始化,通过遥感或地理信息数据库获得待治理水域形状的栅格数据,将数据输入上位机中。上位机依据目标水域的经纬度信息,使用遍历算法,计算得到“s”型的最佳路径,通过云平台发送至浮岛主控单元。
46.(2)主控单元启动两侧推进电机,开始缓慢巡航。在航行过程中,主控单元将gps获取的当前位置与预定轨迹进行实时对比,若浮岛轨迹发生偏离,则通过控制算法进行轨迹纠正。浮岛侧面的超声波收发装置可以在浮岛行进中检测障碍物,在主控单元的控制下实现自主避障。主控单元通过调节浮岛两侧推进器的转速控制速度,利用差速实现转向。
47.(3)浮岛运动的同时会实时读取水质数据,由主控单元内置程序判断出水质状况。当主控单元判断水质评分劣于阈值,则关闭推进器,系统判断开始治理。
48.(4)放锚前,由浮岛上的超声波收发装置向水底发射信号测出水深d,主控单元确定放锚长度,取1.1d~1.3d以保证铁球触底,同时应对水位上涨。
49.(5)放锚后超声波收发装置每半时测一次水深,检测到水位有涨跌,主控单元控制电机调整放出的锚绳长度。
50.(6)浮岛停下后,监测传感器每隔4小时采集一次水质信息,当连续6次采集到水质优于阈值后,主控单元控制减速电机将铁球提升至浮岛底部(电机断电后,在失电制动器的作用下,铁球不会下坠)。
51.(7)主控单元控制开动推进器,浮岛沿原定轨迹继续遍历剩余水域,直至完成整个水域的治理。
52.(8)全过程采用nb-iot模块将水质和位置坐标上传到云端,用户在终端登录云平台后可查看数据和下发指令,可实现一键召回、前往特定位置等功能。
53.注意,上述参数仅基于示例中所用特定设备用于示例水域治理,实际情况需要专业人员根据治理监测对象而定。
54.本发明的有益效果是:本发明的装置具备设计巧妙,操作方便,能耗低、正常使用下磨损率低、低回报高收益等优点。本发明能够实现同时监测与治理水域。相较于传统浮岛占水域面积大、自动化程度低,不容易进行标准化推广等不足与化学试剂投放副作用大、物理抽出处理经济效益低等问题,本发明能够在可接受时间内,在不产生次生污染物的前提下,相当程度地对富营养化水体进行治理。为我国较为广泛存在地湖泊、水库、池塘等较为容易发生富营养化现象地水体地治理提供十分有效的装置与方法。
55.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。