1.本发明涉及计算机技术领域,具体的,本发明涉及一种枪球联动的足球检测方法及系统。
背景技术:
2.足球赛事直播时,为了更好的聚焦精彩的画面,除了实时播放整个足球场的全景,还需要获取球员带球的局部放大画面,使观众有更好的观看体验。但现有的直播解决方案,在直播中对球员带球进行局部放大时经常会出现抓取错误或抓取延迟,大大影响了直播效果,本方案提供了一种枪球联动的足球检测方案,提高了足球检测效果,避免直播中的误识别。
技术实现要素:
3.为了克服现有技术的不足,本发明提供了一种枪球联动的足球检测方法及系统,以解决上述的技术问题。
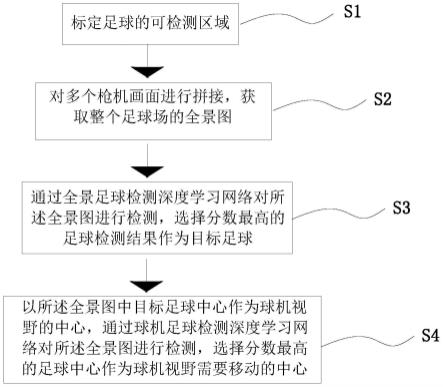
4.本发明解决其技术问题所采用的技术方法是:一种枪球联动的足球检测方法,其改进之处在于:一种枪球联动的足球检测方法,其特征在于:包括以下的步骤:s1、标定足球的可检测区域;s2、对多个枪机画面进行拼接,获取整个足球场的全景图;s3、通过全景足球检测深度学习网络对所述全景图进行检测,选择分数最高的足球检测结果作为目标足球;s4、以所述全景图中目标足球中心作为球机视野的中心,通过球机足球检测深度学习网络对所述全景图进行检测,选择分数最高的足球中心作为球机视野需要移动的中心。
5.在上述方法中,所述步骤s3,包括以下的步骤:
6.s31、输入所述全景图,使用提前训练好的全景足球检测深度学习网络检测足球和行人,输出检测结果,该检测结果包括足球和行人的检测框、标签和置信度;
7.s32、将检测结果输入到跟踪器中,给检测结果加上跟踪标识trackid;
8.s33、对相同的跟踪标识trackid在一段时间内进行像素位移的记录,以确定运动状态标签;
9.s34、过滤静止足球结果,仅选择运动的足球,;
10.s35、过滤足球与行人交并比iou大于设定阈值的结果;
11.s36、选择分数最高的足球检测结果作为目标足球。
12.在上述方法中,所述步骤s34之前,还包括以下的步骤:提前绘制足球场区域,过滤可检测区域外的结果。
13.在上述方法中,所述步骤s4,包括以下的步骤:
14.s41、以所述全景图中目标足球中心为球机视野的中心;
15.s42、使用提前训练好的球机足球检测深度学习网络检测足球和行人,输出检测结果,该检测结果包括足球和行人的检测框、标签和置信度;
16.s43、过滤足球与行人交并比iou大于设定阈值的结果;
17.s44、选择分数最高的足球中心作为球机视野需要移动的中心。
18.在上述方法中,所述步骤s44之前,还包括以下的步骤:通过pid追踪控制算法调节球机运动。
19.在上述方法中,所述步骤s44之后,还包括以下的步骤:若没有识别到足球,则跳转至步骤s3。
20.本发明还提供了一种枪球联动的足球检测系统,包括全景图获取模块、全景足球检测模块和球机足球检测模块,
21.全景图获取模块用于标定足球的可检测区域,对多个枪机画面进行拼接,获取整个足球场的全景图;
22.全景足球检测模块用于通过全景足球检测深度学习网络对所述全景图进行检测,选择分数最高的足球检测结果作为目标足球;
23.球机足球检测模块用于以所述全景图中目标足球中心作为球机视野的中心,通过球机足球检测深度学习网络对所述全景图进行检测,选择分数最高的足球中心作为球机视野需要移动的中心。
24.本发明的有益效果是:通过枪球联动来提高足球的检测效果,及时准确抓取局部放大的球员带球画面;加入了跟踪器,过滤静止足球结果,仅选择运动的足球,排除球场静止物体的误识别和静止放置多余的足球,大大提高了检测效率。
附图说明
25.附图1为本发明的一种枪球联动的足球检测方法的流程图。
具体实施方式
26.下面结合附图和实施例对本发明进一步说明。
27.以下将结合实施例和附图对本发明的构思、具体结构及产生的技术效果进行清楚、完整地描述,以充分地理解本发明的目的、特征和效果。显然,所描述的实施例只是本发明的一部分实施例,而不是全部实施例,基于本发明的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本发明保护的范围。另外,专利中涉及到的所有联接/连接关系,并非单指构件直接相接,而是指可根据具体实施情况,通过添加或减少联接辅件,来组成更优的联接结构。本发明创造中的各个技术特征,在不互相矛盾冲突的前提下可以交互组合。
28.参照图1所示,本发明提供了一种枪球联动的足球检测方法,可以实现枪机全景画面粗检测足球和球机局部画面精细检测足球,具体的,包括以下的s1-s4步骤:
29.s1、标定足球的可检测区域,过滤不需要的背景,减少误识别。
30.s2、对水平放置的多个枪机画面进行拼接,获取整个足球场的全景图。
31.s3、通过全景足球检测深度学习网络对所述全景图进行检测,选择分数最高的足球检测结果作为目标足球;
32.具体的,所述步骤s3,包括以下的步骤:
33.s31、输入所述全景图,使用提前训练好的全景足球检测深度学习网络检测足球和行人,输出检测结果,该检测结果包括足球和行人的检测框、标签和置信度;
34.s32、将检测结果输入到跟踪器中,给检测结果加上跟踪标识trackid;
35.s33、对相同的跟踪标识trackid在一段时间内(例如2秒内)进行像素位移的记录,以确定运动状态标签,例如一段时间(例如2秒内)该id所在的位置变换小于5个像素点值则认为静止,否则运动;
36.s34、过滤静止足球结果,仅选择运动的足球,排除球场静止物体的误识别和静止放置多余的足球;
37.s35、过滤足球与行人交并比iou大于设定阈值的结果,该设定阈值可设定为0.5,防止人身体部位的误识别,例如,防止将头、脚误识别为足球;
38.s36、选择分数最高的足球检测结果作为目标足球。
39.进一步的,在步骤s34之前,还可以提前绘制足球场区域,过滤可检测区域外的结果,减少背景误识别。
40.s4、以所述全景图中目标足球中心作为球机视野的中心,通过球机足球检测深度学习网络对所述全景图进行检测,选择分数最高的足球中心作为球机视野需要移动的中心;
41.具体的,所述步骤s4,包括以下的步骤:
42.s41、以所述全景图中目标足球中心为球机视野的中心,之后检测就在该视野中进行,该视野相比全景画面,足球更加清晰、明显,更容易识别;
43.s42、使用提前训练好的球机足球检测深度学习网络检测足球和行人,输出检测结果,该检测结果包括足球和行人的检测框、标签和置信度;
44.s43、过滤足球与行人交并比iou大于设定阈值的结果,该设定阈值可设定为0.5,防止人身体部位的误识别,例如,防止将头、脚误识别为足球;
45.s44、选择分数最高的足球中心作为球机视野需要移动的中心;若没有识别到足球,则跳转至步骤s3,重新继续后续的流程,直至识别到足球。
46.进一步的,所述步骤s44之前,还可以通过pid追踪控制算法调节球机运动,使球机运动的更顺滑。
47.本发明还提供了一种枪球联动的足球检测系统,包括全景图获取模块、全景足球检测模块和球机足球检测模块,
48.全景图获取模块用于标定足球的可检测区域,对多个枪机画面进行拼接,获取整个足球场的全景图;
49.全景足球检测模块用于通过全景足球检测深度学习网络对所述全景图进行检测,选择分数最高的足球检测结果作为目标足球;
50.球机足球检测模块用于以所述全景图中目标足球中心作为球机视野的中心,通过球机足球检测深度学习网络对所述全景图进行检测,选择分数最高的足球中心作为球机视野需要移动的中心。
51.本发明的一种枪球联动的足球检测系统及系统,通过枪球联动来提高足球的检测效果,及时准确抓取局部放大的球员带球画面;加入了跟踪器,过滤静止足球结果,仅选择运动的足球,排除球场静止物体的误识别和静止放置多余的足球,大大提高了检测效率。
52.以上是对本发明的较佳实施进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做出种种的等同变形或替
换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。