1.本发明涉及一种整星微振动试验中,进行舱段间连接的装置和方法,属于航天器试验技术领域。
背景技术:
2.在卫星进行整星级微振动试验中,为模拟卫星在轨工作期间失重状态,需对卫星进行重力卸载,对于卫星在轨期间舱段间采用如三超作动器这类的柔性连接装置的卫星,由于柔性连接装置承载能力有限,因此地面微振动试验时,上下舱段需要同时进行卸载以模拟卫星在轨期间失重状态。
3.普通吊装设备如卫星总装厂房的吊车,横向及纵向最小位移量为5~10mm,对于上下舱段刚性连接状态,在进行舱段对接时,由于刚性连接承载能力较强,可通过普通吊装设备起吊上舱段,相对下舱段进行横向及纵向调整,通过外力使上下舱段横向对正、吊装设备下降上舱段,实现两舱对接。
4.对于上下舱段通过柔性连接装置连接的卫星,微振动试验前,在上下舱段同时卸载时,为实现上下舱段通过柔性连接装置对接,由于柔性连接装置承载能力有限,因此一般要求上舱段连接孔相对柔性连接装置对接孔对准偏差优于0.1mm。对于横向及纵向最小位移为5~10mm的普通吊装设备无法满足对准偏差优于0.1mm的需求,因此普通吊装设备不能满足存在柔性连接装置的卫星微振动试验时舱段对接需求,需发明一种新的装置实现上下舱段存在柔性连接装置的卫星在微振动试验时上下舱段对接。
技术实现要素:
5.有鉴于此,本发明提供了一种适用于整星微振动试验的舱段高精度连接方法,能够解决舱段间存在柔性连接装置的卫星微振动试验时,在上下舱段同时卸载情况下,使用普通吊装设备无法实现上下舱段精确对接问题。
6.一种适用于整星微振动试验的舱段高精度连接方法,该方法首先在上舱段的下方安装一个调节装置,该调节装置能够实现横向位置偏差小于0.1mm的精确调节,上舱段与柔性连接装置的连接点设置在调节装置上;该方法实现的步骤如下:
7.步骤一:粗调上舱段相对柔性连接装置的横向及纵向相对偏差,对准偏差5~10mm;
8.步骤二:精密调节上舱段相对柔性连接装置的纵向位置和姿态;实现调节装置与柔性连接装置的连接点相对柔性连接装置各连接点纵向间距为1mm,且各连接点间距一致;
9.步骤三:通过操作调节装置,实现调节装置上的连接点相对柔性连接装置各连接点x和y向距离偏差满足对接要求;
10.步骤四:确认上舱段相对柔性连接装置的横向对接精度是否满足对接要求,如果不满足则重复调整直至满足,如果满足则进入下一步;
11.步骤五:精密调节上舱段相对柔性连接装置的纵向位置,使调节装置上对接面与
柔性连接装置对接面对接。
12.进一步地,所述步骤一中粗调上舱段相对柔性连接装置的横向及纵向相对偏差通过普通吊装设备实现,上舱段卸载装置通过普通吊装设备悬吊,上舱段卸载装置与上舱段连接的各个吊带串联电动调节缸。
13.进一步地,所述步骤二中精密调节上舱段相对柔性连接装置的纵向位置和姿态通过上舱段卸载装置与上舱段之间串联的电动调节缸实现。
14.进一步地,所述调节装置包括两个结构完全相同的横向调节平台,两个横向调节平台上下串联固定连接在一起,调节装置通过上方的横向调节平台与上舱段的底部固定连接,上方的横向调节平台的活动部分能够带动下方的横向调节平台同步运动,两个横向调节平台的运动方向互相垂直。
15.进一步地,所述横向调节平台包括上滑块、下滑块和锁紧装置,所述上滑块的下方具有一个燕尾通槽,上滑块的上方具有两组腰形槽,两组腰形槽对称位于燕尾通槽对应位置的两侧;所述下滑块上具有与上滑块燕尾通槽进行配合的滑轨,两者进行嵌入式配合后实现相对运动,所述锁紧装置设置在腰形槽内,当上滑块和下滑块的相对位置调整好之后,锁紧装置将两者进行固定。
16.有益效果:
17.1、本发明的连接方法采用在上舱段的下方安装一个调节装置的方式来实现,该调节装置能够实现横向位置偏差小于0.1mm的精确调节,上舱段与柔性连接装置的连接点设置在调节装置上,利用调节装置的高精度调节性能实现舱段间存在柔性连接装置的卫星微振动试验时,上下舱段同时卸载状态下高精度连接,并保证足够的连接刚度要求。
18.2、本发明在调节的过程中先粗调上舱段相对柔性连接装置的横向及纵向相对偏差,然后再精密调节上舱段相对柔性连接装置的纵向及横向位置和姿态,通过粗调和精调结合的方式能够实现舱段快速柔性连接。
19.3、本发明的横向调节平台包括上滑块、下滑块和锁紧装置,上滑块和下滑块之间通过燕尾通槽的方式嵌入式配合后实现相对运动,运动的行程由对称位于燕尾通槽对应位置的两组腰形槽限制,因此可实现小行程范围内的高精度位移调节,上滑块和下滑块的相对位置由锁紧装置进行固定,结构简单且易于实现。
附图说明
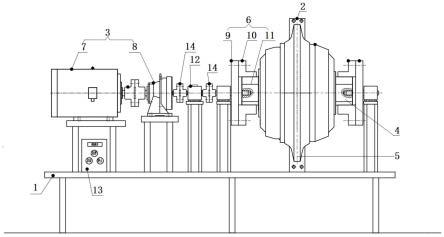
20.图1为本发明舱段高精度连接装置的结构图。
21.图2为横向调节平台锁紧示意图;
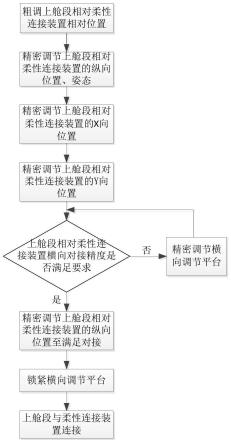
22.图3为调节过程的流程图。
23.其中,1-普通吊装设备、2-上舱段卸载装置、3-电动调节缸、4-上舱段、5-第一横向调节平台、6-第二横向调节平台、7-柔性连接装置、8-下舱段、9-锁紧装置。
具体实施方式
24.下面结合附图并举实施例,对本发明进行详细描述。
25.本发明提供了一种适用于整星微振动试验的舱段高精度连接装置,装置包括:普通吊装设备、上舱段卸载装置、电动调节缸、第一横向调节平台和第二横向调节平台。
26.如附图1所示,上舱段卸载装置(2)通过普通吊装设备1悬吊,上舱段卸载装置(2)与上舱段(4)连接的各个吊带串联电动调节缸(3),上舱段(4)与柔性连接装置(7)之间串联第一横向调节平台(5)和第二横向调节平台(6),串联两个横向调节平台固定在上舱段(4)上,第二横向调节平台(6)下表面提供与柔性连接装置(7)连接接口。
27.如附图2所示,横向调节平台包括上滑块、下滑块和锁紧装置9,所述上滑块的下方具有一个燕尾通槽,上滑块的上方具有两组腰形槽,两组腰形槽对称位于燕尾通槽对应位置的两侧;所述下滑块上具有与上滑块燕尾通槽进行配合的滑轨,两者进行嵌入式配合后实现相对运动,所述锁紧装置设置在腰形槽内,当上滑块和下滑块的相对位置调整好之后,锁紧装置9将两者进行固定。锁紧装置9,以保证连接刚度。所配置的电动调节缸(3)、第一横向调节平台(5)、第二横向调节平台(6)运动调节精度要求不低于0.1mm。其中电动调节缸(3)可实现纵向精密调节,第一横向调节平台(5)、第二横向调节平台(6)可实现横向精密调节。通过普通吊装设备粗调实现纵向及横向粗对准,对准偏差5~10mm;通过电动调节缸(3)精调,实现纵向精密对准;通过第一横向调节平台(5)、第二横向调节平台(6)精调补偿横向精度偏差,使第二横向调节平台(6)下表面提供与柔性连接装置(7)连接接口与柔性连接装置(7)对应接口对准偏差优于0.1mm,满足微振动试验对上下舱段柔性连接的状态要求。
28.本发明进行调节的步骤如附图3所示,
29.步骤一:粗调上舱段相对柔性连接装置(7)相对位置:通过普通吊装设备(1)悬挂上舱段卸载装置(2)起吊上舱段(4)、第一横向调节平台(5)、第二横向调节平台(6)组合体,使用普通吊装设备(1)调节第二横向调节平台(6)上与柔性连接装置(7)连接接口面相对柔性连接装置(7)位置,要求横向(x向、y向)及纵向(z向)相对位置偏差控制到5~10mm,实现第二横向调节平台(6)相对于柔性连接装置(7)几何位置粗对正。
30.步骤二:精密调节上舱段相对柔性连接装置(7)的纵向位置、姿态:测量第二横向调节平台(6)上与柔性连接装置(7)连接接口面相对柔性连接装置(7)各连接点纵向距离偏差,根据各连接点距离偏差、电动调节缸(3)空间位置、柔性连接装置(7)空间位置计算上舱段卸载装置(2)中各个电动调节缸(3)调节量,控制各个电动调节缸(3)完成伸缩运动,实现第二横向调节平台(6)与柔性连接装置(7)连接接口面相对柔性连接装置(7)各连接点z向间距约1mm,且各连接点间距一致。
31.步骤三:精密调节上舱段相对柔性连接装置(7)的x向位置:测量第二横向调节平台(6)与柔性连接装置(7)连接接口面上连接孔与柔性连接装置(7)上连接孔x向距离偏差,调节第一横向调节平台(5),实现第二横向调节平台(6)相对柔性连接装置(7)各连接点x向距离偏差满足对接要求,调节过程中边调节边观察测量。
32.步骤四:精密调节上舱段相对柔性连接装置(7)的y向位置:测量第二横向调节平台(6)与柔性连接装置(7)连接接口面上连接孔与柔性连接装置(7)上连接孔y向距离偏差,调节第二横向调节平台(6),实现第二横向调节平台(6)相对柔性连接装置(7)各连接点y向距离偏差满足对接要求,调节过程中边调节边观察测量。
33.步骤五:确认上舱段相对柔性连接装置(7)横向对接精度:确认第二横向调节平台(6)与柔性连接装置(7)接口匹配情况是否满足要求,当接口匹配情况满足要求时进行下一步操作,当不满足要求时重复上述步骤三和四的调节工作,直至满足对接要求。
34.步骤六:根据对接面间隙,控制电动调节缸(3)联合运动,精密调节上舱段相对柔
性连接装置(7)的纵向位置,使第二横向调节平台(6)上对接面与柔性连接装置(7)对接面对接。
35.步骤七:锁紧第一横向调节平台(5)、第二横向调节平台(6)上锁紧装置,固定横向调节平台位置,增加横向调节平台刚度,以保证连接刚度满足卫星微振动试验要求,锁紧形式不限于本发明附图2中形式,实现锁紧功能属于本发明保护范围。
36.步骤八:上舱段与柔性连接装置(7)连接:连接第二横向调节平台(6)与柔性连接装置(7),实现上舱段(4)与柔性连接装置(7)连接。
37.在实际操作中调节电动调节缸(3)、第一横向调节平台(5)、第二横向调节平台(6)可以联合步进调节,调节顺序可不受前文约束。
38.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。