1.本发明涉及电力电缆技术领域,具体而言涉及机器人/机械臂用柔性电力电缆。
背景技术:
2.工业多自由度机器人多采用关节机器人(也称为多关节机械臂),在诸如增材制造、激光焊接、激光切割等激光加工、包装、上下料、柔性组装、打标打码、涂胶、高精度装配等3c、汽车、食品、机械、医药、玻璃及塑胶产品等行业有深入广泛的实际应用,通过各个自由度关节的协同运动,由机器人末端的执行器完成对应的作业。
3.机器人的关节部位布置关节旋转电机、减速机、编码器、传感器等一体构成的可旋转柔性关节,从机器人的底座内通过动力线(电力电缆)以及控制线(弱电线缆,用于传输控制信号),将系统对于各个柔性关节的控制信号传递至关节旋转电机,各个关节的旋转电机对应执行转动,从而调整整个机器人的位置和姿态,实现工作作业。在作业过程中,如果对于线缆的柔性度和冗余量留足,这在机器人的各个方向的转动过程中,对电缆的反复扭转、弯曲等操作,对线缆的损伤较小,按照正常设计标准和规格,机器人的电缆的寿命至少在弯曲10万次以上依然不开裂并保持良好的电性能。
4.但在一些设计场景下,处于节省成本等原因,机器人上使用的线缆通常冗余度不足,而且在传统设计下仅仅使用多层绕包、卷绕式设计的柔性电缆,出于重量的考虑,希望尽量减轻机器人电缆的重量,以减小线缆自重对于机械臂的负载影响,从而导致线缆的包被层在满足绝缘、耐温、耐腐蚀等性能标准的前提下,尽可能做的越来越薄,导致在一定时间的反复弯曲、扭曲后,尤其是在长度冗余量处于刚刚好或者稍微长一点的情况下,电缆开裂等现象严重,甚至会出现因弯曲角度过小导致的挤压力过大造成绝缘护套破损,导致因缆芯暴露而出现的漏电现象,形成安全隐患。
技术实现要素:
5.针对现有技术处在的缺陷与不足,本发明的第一方面提供一种机器人/机械臂用柔性电力电缆,包括:
6.加强缆芯,所述加强缆芯外壁周向一体成型有多个等距布置的隔离件;
7.多个导电单元,多个所述导电单元分别分布在多个所述隔离件之间;
8.限位缓冲层,沿长度方向螺旋绕包在多个所述导电单元的外壁,且绕包无搭接;
9.阻燃绕包层,包覆于所述限位缓冲层的外壁;
10.外绝缘层,包覆于所述阻燃绕包层的外壁;
11.外护套,包覆于所述外绝缘层的外壁;
12.其中,所述限位缓冲层包括硬质档条和沿长度方向固定设置在其两侧的弹性条,所述弹性条的内部沿其长度方向嵌设有缓冲条。
13.优选的,所述硬质档条的两侧面均涂附有粘接层,所述弹性条通过所述粘接层粘接在所述硬质档条的两侧面。
14.优选的,所述硬质档条、所述弹性条和所述缓冲条的截面两侧长边所在面均为具有相同倾斜角度的斜面,并用于相互嵌设绕包。
15.优选的,所述弹性条为阻燃隔热弹性条。
16.优选的,所述外护套为阻燃pvc层。
17.优选的,所述导电单元包括由内到外依次布置的导电线芯和内护套。
18.优选的,所述内护套为xlpe绝缘层。
19.与现有技术相比,本发明的机器人/机械臂用柔性电力电缆的显著有益效果在于:
20.通过电缆的结构优化设计,在加强缆芯外壁周向一体成型多个等距布置的隔离件,多个导电单元分别分布在多个所述隔离件之间,然后在导电单元的外部包覆具有硬质档条和橡胶条的限位缓冲层,沿长度方向螺旋绕包在所述导电单元的外壁,且绕包无搭接。由此,在电缆反复弯曲、扭转时,相邻硬质档条位于电缆弯曲处内侧的区域向内挤压,位于电缆弯曲处外侧的区域向外扩张,向内挤压的硬质档条对弹性条和缓冲条进行压缩,弹性条和缓冲条收缩的过程中对挤压力进行缓冲,保证电缆具有良好的回弹性。
21.同时,当弹性条和缓冲条被挤压到收缩极限时,硬质档条无法继续压缩弹性条和缓冲条,此时,电缆整体无法继续缩小弯曲半径,可有效保护电缆在弯曲时因弯曲半径过小造成的绝缘护套破损,提高电缆整体安全性。
22.应当理解,前述构思以及在下面更加详细地描述的额外构思的所有组合只要在这样的构思不相互矛盾的情况下都可以被视为本公开的发明主题的一部分。另外,所要求保护的主题的所有组合都被视为本公开的发明主题的一部分。
23.结合附图从下面的描述中可以更加全面地理解本发明教导的前述和其他方面、实施例和特征。本发明的其他附加方面例如示例性实施方式的特征和/或有益效果将在下面的描述中显见,或通过根据本发明教导的具体实施方式的实践中得知。
附图说明
24.附图不意在按比例绘制。在附图中,在各个图中示出的每个相同或近似相同的组成部分可以用相同的标号表示。为了清晰起见,在每个图中,并非每个组成部分均被标记。
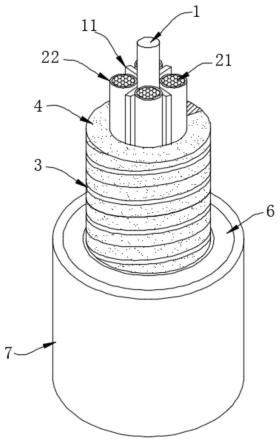
25.图1是本发明所示的机器人/机械臂用柔性电力电缆结构示意图。
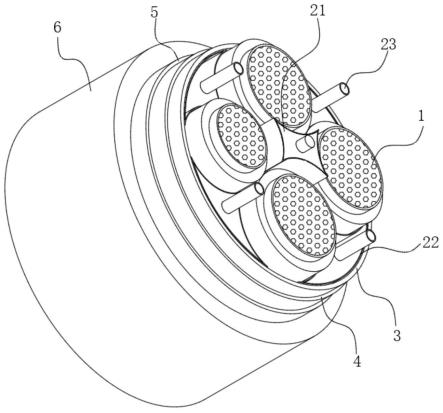
26.图2是本发明所示的机器人/机械臂用柔性电力电缆立体图。
27.图3是本发明所示的机器人/机械臂用柔性电力电缆限位缓冲层轴向截面结构示意图。
28.图4是本发明所示的机器人/机械臂用柔性电力电缆弯曲处的限位缓冲层轴向截面结构示意图。
具体实施方式
29.为了更了解本发明的技术内容,特举具体实施例并配合所附图式说明如下。
30.在本公开中参照附图来描述本发明的各方面,附图中示出了许多说明的实施例。本公开的实施例不必定意在包括本发明的所有方面。应当理解,上面介绍的多种构思和实施例,以及下面更加详细地描述的那些构思和实施方式可以以很多方式中任意一种来实施,这是因为本发明所公开的构思和实施例并不限于任何实施方式。另外,本发明公开的一
些方面可以单独使用,或者与本发明公开的其他方面的任何适当组合来使用。
31.结合图1和图2所示的实施例的机器人/机械臂用柔性电力电缆,包括加强缆芯1、导电单元2、限位缓冲层、阻燃绕包层5、外绝缘层6和外护套7。
32.其中,加强缆芯1外壁周向一体成型有多个等距布置的隔离件11。图示所示的示例中,以四个隔离件11为例进行说明。
33.在可选的实施例中,加强缆芯1和隔离件11均为轻质的尼龙材质,其抗拉强度较高,可有效增加电缆整体的抗拉强度。
34.由此,隔离件11将多个导电单元2分开,防止电缆在扭转时导电单元2相互摩擦造成绝缘破损发生短路。
35.进一步的,多个导电单元2分别分布在多个隔离件11之间。
36.导电单元2包括由内到外依次布置的导电线芯21和内护套22,内护套22为xlpe绝缘层。
37.在可选的实施例中,导电线芯21为多股铜丝绞合而成,具有良好的柔韧性,内护套22为xlpe绝缘材料,其具有良好的电气绝缘性能,且其具有较小的弯曲半径,使得电缆整体具有较小的弯曲半径。
38.结合图2、图3和图4所示,限位缓冲层沿长度方向螺旋绕包在多个导电单元2的外壁,且绕包无搭接。
39.进一步的,限位缓冲层包括硬质档条3和沿长度方向固定设置在其两侧的弹性条4。
40.其中,弹性条4的内部沿其长度方向嵌设有缓冲条41。弹性条4优选为阻燃隔热弹性条。
41.硬质档条3和固定设置在其两侧的弹性条4沿电缆的长度方向螺旋绕包,且相邻绕箍之间的弹性条4相互抵紧压接。
42.在可选的实施例中,硬质档条3的材质为abs塑料,其硬度较高,可有效起到弯曲角度限位的作用。
43.弹性条4阻燃隔热橡塑海绵,其具有良好的隔热阻燃性能,热传导效率较低,降低缓冲条41的老化速率。
44.其中的缓冲条41的材质为氯丁橡胶,其具有良好的机械性能,在起到有效缓冲挤压力作用的同时,具有良好的耐老化、耐热、耐油和耐化学腐蚀性能。
45.如此,在电缆弯曲时,相邻硬质档条3位于电缆弯曲处内侧的区域向内挤压,结合图4所示,向内挤压的硬质档条3对弹性条4和缓冲条41进行压缩,弹性条4和缓冲条41收缩的过程中对挤压力进行缓冲,保证电缆具有良好的回弹性,同时,当弹性条4和缓冲条41被挤压到收缩极限时,硬质档条3无法继续压缩弹性条4和缓冲条41,此时,电缆整体无法继续缩小弯曲半径,可有效保护电缆在弯曲时因弯曲半径过小造成的绝缘护套破损,提高电缆安全性,相邻硬质档条3位于电缆弯曲处外侧的区域向外扩张,不会对电缆的弯曲造成影响。
46.进一步的,硬质档条3的两侧面均涂附有粘接层31,弹性条4通过粘接层31粘接在硬质档条3的两侧面,通过粘接层31将弹性条4粘接固定在硬质档条3的两侧面,防止其脱落。
47.在可选的实施例中,粘接层31采用聚氨酯阻燃粘接胶,在保证粘接性能的同时,其还具有良好的阻燃效果。
48.进一步的,硬质档条3、弹性条4和缓冲条41的截面两侧长边所在面均为具有相同倾斜角度的斜面,并用于相互嵌设绕包,在绕包限位缓冲层时,相邻的弹性条4可相互压接,提高绕包的稳定性,防止其在传送时发生径向松散。
49.结合图1所示,阻燃绕包层5包覆于限位缓冲层的外壁,外绝缘层6包覆于阻燃绕包层5的外壁,外护套7包覆于外绝缘层6的外壁。
50.在可选的实施例中,阻燃绕包层5采用阻燃云母带进行绕包,对限位缓冲层进行包覆固定的同时具有良好的阻燃性能,外绝缘层6为xlpe绝缘材料,其具有良好的电气绝缘性能,且其具有较小的弯曲半径,使得电缆整体具有较小的弯曲半径。
51.进一步的,外护套7为阻燃pvc层,外护套7采用阻燃pvc挤包而成,其具有耐日光老化和阻燃环保的性能。
52.其中,在阻燃云母带绕包层5的的外部,外护套7与xlpe外绝缘层6可采用共挤工艺一体制备成型。
53.在另外的实施例中,在xlpe外绝缘层6与外护套7之间还设置有总屏蔽层,例如细铜网或者铜网与纤维的混合编织层。
54.虽然本发明已以较佳实施例揭露如上,然其并非用以限定本发明。本发明所属技术领域中具有通常知识者,在不脱离本发明的精神和范围内,当可作各种的更动与润饰。因此,本发明的保护范围当视权利要求书所界定者为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。