1.本技术涉及到矿山通风领域,具体而言,涉及一种基于掘进工作面的通风降尘方法和装置。
背景技术:
2.具有“矿井肺脏”之称的通风机(或者简称为风机)是矿井固定设备,担负着向井下输送新鲜空气、排出粉尘和污浊气流、确保矿井安全生产和保证人身安全的重任。对矿山风机运行状态、运行环境实时准确监测,在矿山安全生产中起着至关重要的作用。
3.风机的启动一般是人工来进行控制的,这种控制的方式是工人达到工作位置之后进行启动,在工人下班离开之前将风机关闭,这种处理方式不够智能,无法满足智能控制的需要。
技术实现要素:
4.本技术实施例提供了一种基于掘进工作面的通风降尘方法和装置,以至少解决人工启动和关闭矿山中的风机所导致的问题。
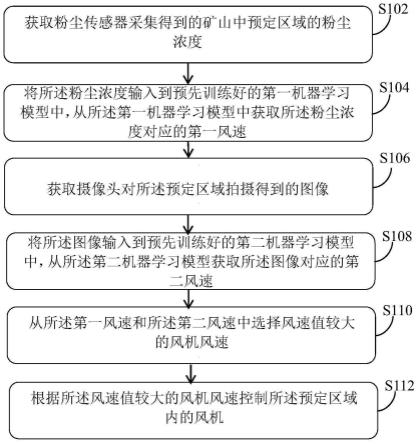
5.根据本技术的一个方面,提供了一种基于掘进工作面的通风降尘方法,包括:获取粉尘传感器采集得到的矿山中预定区域的粉尘浓度;将所述粉尘浓度输入到预先训练好的第一机器学习模型中,从所述第一机器学习模型中获取所述粉尘浓度对应的第一风速;获取摄像头对所述预定区域拍摄得到的图像;将所述图像输入到预先训练好的第二机器学习模型中,从所述第二机器学习模型获取所述图像对应的第二风速;从所述第一风速和所述第二风速中选择风速值较大的风机风速;根据所述风速值较大的风机风速控制所述预定区域内的风机。
6.进一步地,所述第一机器学习模型是使用多组第一训练数据训练得到的,所述第一训练数据包括粉尘浓度和与粉尘浓度对应的风机的风速。
7.进一步地,所述第二机器学习模型是使用多组第二训练数据训练得到的,所述第二训练数据包括所述预定区域的图像以及在该图像表示的粉尘浓度对应的风机的风速。
8.进一步地,从所述第一风速和所述第二风速中选择风速值较大的风机风速包括:
9.在所述第一风速和所述第二风速之间的差值的绝对值在预定范围内,则从所述第一风速和所述第二风速中选择风速值较大的风机风速;
10.在所述第一风速和所述第二风速之间的差值的绝对值在所述预定范围之外,则使用所述第一风速和所述第二风速中风速值较大的风机风速启动所述区域内的风机,并保持该风速进行预定时长的吹风,在进行预定时长的吹风之后,判断所述预定时长内粉尘浓度下降是否超过阈值,如果超过阈值,则将所述风机风速降低预定值,进行第二时长的吹风,依次类推,直到所述风机风速降低到所述第一风速和所述第二风速中风速较小的风机风速。
11.进一步地,所述预定范围为预先确定的。
12.根据本技术的另一个方面,还提供了一种基于掘进工作面的通风降尘装置,包括:第一获取模块,用于获取粉尘传感器采集得到的矿山中预定区域的粉尘浓度;第二获取模块,用于将所述粉尘浓度输入到预先训练好的第一机器学习模型中,从所述第一机器学习模型中获取所述粉尘浓度对应的第一风速;第三获取模块,用于获取摄像头对所述预定区域拍摄得到的图像;第四获取模块,用于将所述图像输入到预先训练好的第二机器学习模型中,从所述第二机器学习模型获取所述图像对应的第二风速;选择模块,用于从所述第一风速和所述第二风速中选择风速值较大的风机风速;控制模块,用于根据所述风速值较大的风机风速控制所述预定区域内的风机。
13.进一步地,所述第一机器学习模型是使用多组第一训练数据训练得到的,所述第一训练数据包括粉尘浓度和与粉尘浓度对应的风机的风速。
14.进一步地,所述第二机器学习模型是使用多组第二训练数据训练得到的,所述第二训练数据包括所述预定区域的图像以及在该图像表示的粉尘浓度对应的风机的风速。
15.进一步地,所述选择模块用于:在所述第一风速和所述第二风速之间的差值的绝对值在预定范围内,则从所述第一风速和所述第二风速中选择风速值较大的风机风速。
16.进一步地,所述预定范围为预先确定的。
17.在本技术实施例中,采用了获取粉尘传感器采集得到的矿山中预定区域的粉尘浓度;将所述粉尘浓度输入到预先训练好的第一机器学习模型中,从所述第一机器学习模型中获取所述粉尘浓度对应的第一风速;获取摄像头对所述预定区域拍摄得到的图像;将所述图像输入到预先训练好的第二机器学习模型中,从所述第二机器学习模型获取所述图像对应的第二风速;从所述第一风速和所述第二风速中选择风速值较大的风机风速;根据所述风速值较大的风机风速控制所述预定区域内的风机。通过本技术解决了人工启动和关闭矿山中的风机所导致的问题,从而可以实现风机的自动控制,在节能的基础上更好地对矿山进行通风降尘。
附图说明
18.构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
19.图1是根据本技术实施例的基于掘进工作面的通风降尘的流程图。
具体实施方式
20.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
21.需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
22.矿山中的煤矿井下掘进工作面,只有一条巷道,送风和回风在一条巷道内完成。由掘进巷道外的风机通过风筒将风送入掘进头端,稀释掘进头的粉尘,再在掘进头附近安装一套风机将掘进头内部的空气,抽出到掘进巷道外,实现降尘。上述风机的启停、风量大小,需根据监测的巷道环境进行分析,给出通风机的执行指令,达到掘进巷道内最佳的降尘效
果。上述巷道环境中,粉尘浓度是核心关注对象,本技术的实施例主要基于粉尘浓度进行风机控制的一种方法。
23.在本实施例中,提供了一种基于掘进工作面的通风降尘方法,图1是根据本技术实施例的基于掘进工作面的通风降尘的流程图,如图1所示,下面对图1中包括的步骤进行说明。
24.步骤s102,获取粉尘传感器采集得到的矿山中预定区域的粉尘浓度。
25.步骤s104,将所述粉尘浓度输入到预先训练好的第一机器学习模型中,从所述第一机器学习模型中获取所述粉尘浓度对应的第一风速;例如,所述第一机器学习模型是使用多组第一训练数据训练得到的,所述第一训练数据包括粉尘浓度和与粉尘浓度对应的风机的风速。
26.作为一个可选的实施方式,所述粉尘浓度和粉尘浓度对应的风机的风速是经过试验得到的,预先确定一个时长(例如5分钟),在粉尘浓度为预定值的情况下,获取在预定时长内吹风可以将所述粉尘浓度降低为标准值的风速,则该风速为该预定值的粉尘浓度对应的风机的风速。所述标准值为预先从企业操作规范中获取到的。
27.步骤s106,获取摄像头对所述预定区域拍摄得到的图像。
28.步骤s108,将所述图像输入到预先训练好的第二机器学习模型中,从所述第二机器学习模型获取所述图像对应的第二风速;例如,所述第二机器学习模型是使用多组第二训练数据训练得到的,所述第二训练数据包括所述预定区域的图像以及在该图像表示的粉尘浓度对应的风机的风速。
29.作为一个可选的实施方式,在该步骤中,所述第二机器学习模型可以是基于图像识别粉尘浓度的机器学习模型,所述第二机器学习模型是使用多组训练数据训练得到的,其中,所述训练数据包括图像和该图像被人工标签标记的粉尘浓度。将对所述预定区域拍摄得到的图像输入到所述第二机器学习模型中,从所述第二机器学习模型中获取输出的粉尘浓度;将所述粉尘浓度输入到所述第一机器学习模型中获取所述第二风速。
30.作为一个可选的实施方式,对所述第二机器学习模型进行训练的图像,是对拍摄得到的图像经过如下处理得到:拍摄得到一张没有粉尘的背景图像,将需要进行粉尘浓度识别的待识别图像和所述背景图像均进行二值化处理,得到两张黑白图像,将所述两张黑白图像中的每个像素值相减得到的图像作为对所述第二机器学习模型进行训练的图像。将对所述预定区域拍摄得到的图像也进行二值化处理与背景图像每个像素值相减得到的图像输入到所述第二机器学习模型中获取输出的粉尘浓度。
31.步骤s110,从所述第一风速和所述第二风速中选择风速值较大的风机风速;
32.可选地,在该步骤中,在所述第一风速和所述第二风速之间的差值的绝对值在预定范围内,则从所述第一风速和所述第二风速中选择风速值较大的风机风速。其中,所述预定范围为预先确定的。
33.步骤s112,根据所述风速值较大的风机风速控制所述预定区域内的风机。
34.通过上述步骤解决了人工启动和关闭矿山中的风机所导致的问题,从而可以实现风机的自动控制,在节能的基础上更好地对矿山进行通风降尘。
35.作为另一个可选的实施方式,可以获取预先配置的标准值,在粉尘浓度低于所述标准值的情况下,不启动所述风机,但是,在所述粉尘浓度低于所述标准值的情况下,获取
第一时长的第一粉尘浓度值,然后再获取第一时长之后的第二时长的第二粉尘浓度值,如果第二粉尘浓度值大于所述第一粉尘浓度值,并且所述第二粉尘浓度值小于所述标准值以及所述第二粉尘浓度值与所述第一粉尘浓度值的差大于预先配置的浓度值,则以预先配置的风速启动所述风机。
36.在另一个可选的实施方式中,还可以对风机的运行状态进行监控,如果风机运行状态出现异常,则发出报警信息,其中,所述报警信息发送给管理人员,发送给管理人员的报警信息用于指示所述风机运行状态出现异常;获取在所述风机所在区域工作的工作人员,其中,通过所述工作人员携带的智能设备确定在所述风机所在区域的工作人员;将所述报警信息发送给在所述风机所在区域的工作人员的智能设备上,发送到智能设备上的报警信息用于指示该工作人员离开所述风机所在的区域。
37.对风机运行状态进行监控的方式有很多种,例如,该监控系统可以包含监控中心、传输装置和监测设备;监测设备包含电量传感器、负压和差压检测仪、绕组温度监测仪、振动传感器和风速监测传感器,传输装置包含交换机和光端机,交换机和光端机22连接,光端机与电量传感器、负压和差压检测仪、绕组温度监测仪、振动传感器和风速监测传感器连接,交换机与监控中心连接。
38.所述的监控中心实现监测数据的采集、显示、存储、分析、报表打印和远程控制功能。所述的传输装置内设有矿用阻燃光缆和矿用通讯电缆,通过交换机和光端机可以实现监测数据的实时传输、控制信号的有效下发。所述的监测设备还包含监控分站、监测传感器、变送器、控制执行器。所述的电量传感器通过一些电参数的监测可以了解通风机当前的运行状态,有利于发现电动机的故障。所述的振动传感器为单轴智能振动传感器,它能将机械振动信号直接转换为数字化波形数据,并通过传感器的rs485接口传送到计算机处理。具有不锈钢防水外壳,使传感器适用于潮湿环境。传感器内置的dsp信号处理器对振动数据进行fft(傅立叶变换)分析,并计算出速度、位移值。传感器可直接输出时域和频域的振动波形数据。
39.本实施例中的方案可以应用到多种结构的风机,例如,在本实施例中就提供了这样的一种风机系统,该矿山风机系统,包括密闭墙、风机、风筒和密封门,密封墙上设置密封门和风筒,风机设置在风筒内,与风机配套设置防回流部件,防回流部件固定设置于风筒前方,防回流部件包括框体和至少四个挡板,挡板通过转轴与框体活动连接,挡板打开方向同风机出风方向。优选的,所述防回流部件的挡板由上至下依次设置。优选的,所述防回流部件的挡板打开时与铅锤面夹角为50
°
~89
°
。
40.在本实施例中,还可以在风机中增加矿山通风机防尘过滤装置,该过滤装置包括进风管,所述进风管一侧依次设有互相之间通过连通管连通的第一过滤箱、第二过滤箱和第三过滤箱,所述进风管与第一过滤箱连通,所述第一过滤箱内设有第一电机,所述第一电机上设有第一风机,第一过滤箱内还设有第一滤网,第一风机运转将外界空气抽吸入第一过滤箱,空气在第一滤网进行第一次过滤;所述第二过滤箱顶部设有若干雾化喷头,第二过滤箱顶部外表面设有与雾化喷头连通的水箱,第二过滤箱内还设有若干层第二滤网,空气在第二过滤箱内被雾化水湿润,并被第二滤网进行第二次过滤;所述第三过滤箱内设有若干层第三滤网,空气在第三过滤箱内进行第三次过滤。
41.可选地,所述第一过滤箱内设有第一支架,所述第一电机设于第一支架上,所述第
一滤网设于第一电机远离进风管一侧。所述第一电机为双输出轴电机,第一电机靠近进风管一侧的输出轴上设有第一风机,第一电机远离进风管一侧的输出轴上设有转轴,所述转轴上设有毛刷,所述毛刷与第一滤网接触。所述转轴与输出轴转动连接,转轴与输出轴的连接端设有内啮合棘轮,输出轴与转轴的连接端设有与内啮合棘轮配合的棘爪。所述第二过滤箱内设有两层第二滤网,所述第二滤网上部设有若干雾化喷头与其接触,雾化喷头可使第二滤网湿润。所述第二过滤箱下部设有隔板,所述隔板上对应位置设有供第二滤网插入的插槽,隔板上还设有通孔,第二过滤箱内的污水可通过通孔进入第二过滤箱底部。所述隔板倾斜布置,所述通孔设于隔板的较低端。所述第二过滤箱底部一侧设有排污口。所述第三过滤箱内设有两层第三滤网。所述第三过滤箱内设有第二支架,所述第二支架上设有第二电机,所述第二电机上设有第二风机,第二电机辅助第一电机增加空气的流入速度。
42.在本实施例中,提供一种电子装置,包括存储器和处理器,存储器中存储有计算机程序,处理器被设置为运行计算机程序以执行以上实施例中的方法。
43.上述程序可以运行在处理器中,或者也可以存储在存储器中(或称为计算机可读介质),计算机可读介质包括永久性和非永久性、可移动和非可移动媒体可以由任何方法或技术来实现信息存储。信息可以是计算机可读指令、数据结构、程序的模块或其他数据。计算机的存储介质的例子包括,但不限于相变内存(pram)、静态随机存取存储器(sram)、动态随机存取存储器(dram)、其他类型的随机存取存储器(ram)、只读存储器(rom)、电可擦除可编程只读存储器(eeprom)、快闪记忆体或其他内存技术、只读光盘只读存储器(cd-rom)、数字多功能光盘(dvd)或其他光学存储、磁盒式磁带,磁带磁盘存储或其他磁性存储设备或任何其他非传输介质,可用于存储可以被计算设备访问的信息。按照本文中的界定,计算机可读介质不包括暂存电脑可读媒体(transitory media),如调制的数据信号和载波。
44.这些计算机程序也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤,对应与不同的步骤可以通过不同的模块来实现。
45.该本实施例中就提供了这样的一种装置或系统。该装置被称为一种基于自动化控制的矿山用通风降尘装置,包括:第一获取模块,用于获取粉尘传感器采集得到的矿山中预定区域的粉尘浓度;第二获取模块,用于将所述粉尘浓度输入到预先训练好的第一机器学习模型中,从所述第一机器学习模型中获取所述粉尘浓度对应的第一风速;第三获取模块,用于获取摄像头对所述预定区域拍摄得到的图像;第四获取模块,用于将所述图像输入到预先训练好的第二机器学习模型中,从所述第二机器学习模型获取所述图像对应的第二风速;选择模块,用于从所述第一风速和所述第二风速中选择风速值较大的风机风速;控制模块,用于根据所述风速值较大的风机风速控制所述预定区域内的风机。
46.该系统或者装置用于实现上述的实施例中的方法的功能,该系统或者装置中的每个模块与方法中的每个步骤相对应,已经在方法中进行过说明的,在此不再赘述。
47.例如,所述第一机器学习模型是使用多组第一训练数据训练得到的,所述第一训练数据包括粉尘浓度和与粉尘浓度对应的风机的风速。可选地,所述第二机器学习模型是使用多组第二训练数据训练得到的,所述第二训练数据包括所述预定区域的图像以及在该图像表示的粉尘浓度对应的风机的风速。
48.又例如,所述选择模块用于:在所述第一风速和所述第二风速之间的差值的绝对值在预定范围内,则从所述第一风速和所述第二风速中选择风速值较大的风机风速。可选地,所述预定范围为预先确定的。
49.通过上述实施例解决了人工启动和关闭矿山中的风机所导致的问题,从而可以实现风机的自动控制,在节能的基础上更好地对矿山进行通风降尘。
50.该系统或者装置用于实现上述的实施例中的方法的功能,该系统或者装置中的每个模块与方法中的每个步骤相对应,已经在方法中进行过说明的,在此不再赘述。
51.以上仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。